Reverse Engineering the Euglenoid Movement
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Morphological Re-Description of Ploeotia Pseudanisonema, and Phylogenetic Analysis of the Genus Ploeotia
A Morphological Re-Description of Ploeotia pseudanisonema, and Phylogenetic Analysis of the Genus Ploeotia by Andrew Buren Brooks (Under the direction of Mark A. Farmer) Abstract The genus Ploeotia represents a group of small, colorless, heterotrophic euglenids commonly found in shallow-water marine sediments. Species belonging to this genus have histori- cally been poorly described and studied. However, a Group I intron discovered within the small subunit ribosomal DNA gene of Ploeotia costata, makes P. costata the only euglena- zoan known to possess an actively splicing Group I intron. This intron contains conserved secondary structures that indicate monophyly with introns found in Stramenopiles and Ban- giales red algae. This project describes the internal and external morphology of a related species, Ploeotia pseudanisonema, using light and electron microscopy, and investigates the possibility of a Group I intron within P. pseudanisonema. Using recently obtained SSU rRNA sequences, we also examine the phylogeny of Ploeotia, and comment on the relationship of the genus Keelungia to Ploeotia. Index words: Ploeotia pseudanisonema, Ploeotia costata, Ploeotia vitrea, Keelungia pulex, Transmission electron microscopy, Scanning electron microscopy, Small subunit rRNA, Euglenozoan Phylogeny A Morphological Re-Description of Ploeotia pseudanisonema, and Phylogenetic Analysis of the Genus Ploeotia by Andrew Buren Brooks B.S., University of Alabama, 2009 A Thesis Submitted to the Graduate Faculty of The University of Georgia in Partial Fulfillment of the Requirements for the Degree Master of Science Athens, Georgia 2010 c 2014 Andrew Buren Brooks All Right Reserved A Morphological Re-Description of Ploeotia pseudanisonema, and Phylogenetic Analysis of the Genus Ploeotia by Andrew Buren Brooks Approved: Major Professor: Mark A. -

Medical Parasitology
MEDICAL PARASITOLOGY Anna B. Semerjyan Marina G. Susanyan Yerevan State Medical University Yerevan 2020 1 Chapter 15 Medical Parasitology. General understandings Parasitology is the study of parasites, their hosts, and the relationship between them. Medical Parasitology focuses on parasites which cause diseases in humans. Awareness and understanding about medically important parasites is necessary for proper diagnosis, prevention and treatment of parasitic diseases. The most important element in diagnosing a parasitic infection is the knowledge of the biology, or life cycle, of the parasites. Medical parasitology traditionally has included the study of three major groups of animals: 1. Parasitic protozoa (protists). 2. Parasitic worms (helminthes). 3. Arthropods that directly cause disease or act as transmitters of various pathogens. Parasitism is a form of association between organisms of different species known as symbiosis. Symbiosis means literally “living together”. Symbiosis can be between any plant, animal, or protist that is intimately associated with another organism of a different species. The most common types of symbiosis are commensalism, mutualism and parasitism. 1. Commensalism involves one-way benefit, but no harm is exerted in either direction. For example, mouth amoeba Entamoeba gingivalis, uses human for habitat (mouth cavity) and for food source without harming the host organism. 2. Mutualism is a highly interdependent association, in which both partners benefit from the relationship: two-way (mutual) benefit and no harm. Each member depends upon the other. For example, in humans’ large intestine the bacterium Escherichia coli produces the complex of vitamin B and suppresses pathogenic fungi, bacteria, while sheltering and getting nutrients in the intestine. 3. -

Mixotrophic Protists Among Marine Ciliates and Dinoflagellates: Distribution, Physiology and Ecology
FACULTY OF SCIENCE UNIVERSITY OF COPENHAGEN PhD thesis Woraporn Tarangkoon Mixotrophic Protists among Marine Ciliates and Dinoflagellates: Distribution, Physiology and Ecology Academic advisor: Associate Professor Per Juel Hansen Submitted: 29/04/10 Contents List of publications 3 Preface 4 Summary 6 Sammenfating (Danish summary) 8 สรุป (Thai summary) 10 The sections and objectives of the thesis 12 Introduction 14 1) Mixotrophy among marine planktonic protists 14 1.1) The role of light, food concentration and nutrients for 17 the growth of marine mixotrophic planktonic protists 1.2) Importance of marine mixotrophic protists in the 20 planktonic food web 2) Marine symbiont-bearing dinoflagellates 24 2.1) Occurrence of symbionts in the order Dinophysiales 24 2.2) The spatial distribution of symbiont-bearing dinoflagellates in 27 marine waters 2.3) The role of symbionts and phagotrophy in dinoflagellates with symbionts 28 3) Symbiosis and mixotrophy in the marine ciliate genus Mesodinium 30 3.1) Occurrence of symbiosis in Mesodinium spp. 30 3.2) The distribution of marine Mesodinium spp. 30 3.3) The role of symbionts and phagotrophy in marine Mesodinium rubrum 33 and Mesodinium pulex Conclusion and future perspectives 36 References 38 Paper I Paper II Paper III Appendix-Paper IV Appendix-I Lists of publications The thesis consists of the following papers, referred to in the synthesis by their roman numerals. Co-author statements are attached to the thesis (Appendix-I). Paper I Tarangkoon W, Hansen G Hansen PJ (2010) Spatial distribution of symbiont-bearing dinoflagellates in the Indian Ocean in relation to oceanographic regimes. Aquat Microb Ecol 58:197-213. -

Fungal Genomes Tell a Story of Ecological Adaptations
Folia Biologica et Oecologica 10: 9–17 (2014) Acta Universitatis Lodziensis Fungal genomes tell a story of ecological adaptations ANNA MUSZEWSKA Institute of Biochemistry and Biophysics, Polish Academy of Sciences, Pawinskiego 5A, 02-106 Warsaw, Poland E-mail: [email protected] ABSTRACT One genome enables a fungus to have various lifestyles and strategies depending on environmental conditions and in the presence of specific counterparts. The nature of their interactions with other living and abiotic elements is a consequence of their osmotrophism. The ability to degrade complex compounds and especially plant biomass makes them a key component of the global carbon circulation cycle. Since the first fungal genomic sequence was published in 1996 mycology has benefited from the technolgical progress. The available data create an unprecedented opportunity to perform massive comparative studies with complex study design variants targeted at all cellular processes. KEY WORDS: fungal genomics, osmotroph, pathogenic fungi, mycorrhiza, symbiotic fungi, HGT Fungal ecology is a consequence of osmotrophy Fungi play a pivotal role both in encountered as leaf endosymbionts industry and human health (Fisher et al. (Spatafora et al. 2007). Since fungi are 2012). They are involved in biomass involved in complex relationships with degradation, plant and animal infections, other organisms, their ecological fermentation and chemical industry etc. repertoire is reflected in their genomes. They can be present in the form of The nature of their interactions with other resting spores, motile spores, amebae (in organisms and environment is defined by Cryptomycota, Blastocladiomycota, their osmotrophic lifestyle. Nutrient Chytrydiomycota), hyphae or fruiting acquisition and communication with bodies. The same fungal species symbionts and hosts are mediated by depending on environmental conditions secreted molecules. -

Horizontal Gene Transfer in Osmotrophs: Playing with Public Goods
ORE Open Research Exeter TITLE Horizontal gene transfer in osmotrophs: playing with public goods. AUTHORS Richards, Thomas A; Talbot, Nicholas J. JOURNAL Nat Rev Microbiol DEPOSITED IN ORE 19 November 2014 This version available at http://hdl.handle.net/10871/15898 COPYRIGHT AND REUSE Open Research Exeter makes this work available in accordance with publisher policies. A NOTE ON VERSIONS The version presented here may differ from the published version. If citing, you are advised to consult the published version for pagination, volume/issue and date of publication PERSPECTIVES however, not unique to fungi. Many bacteria, OPINION for instance, feed in an analogous man ner, and other eukaryotic groups, such as Horizontal gene transfer in hyphochytriomycetes (FIG. 1c) and oomycetes (FIG. 1d) (sometimes collectively termed the pseudofungi26), also feed osmotrophically osmotrophs: playing with public and adopt filamentous growth habits, allow ing invasive growth in heterogeneous sub goods strates. Importantly, these eukaryotes also lost the ability to carry out phagotrophy and Thomas A. Richards and Nicholas J. Talbot became obligately osmotrophic26,27. Osmotrophy has a number of distinct Abstract | Osmotrophic microorganisms, such as fungi and oomycetes, feed advantages as a feeding strategy. External by secreting depolymerizing enzymes to process complex food sources in the digestion of large and complex polymers extracellular environment, and taking up the resulting simple sugars, micronutrients allows greater control over substances that and amino acids. As a consequence of this lifestyle, osmotrophs engage in the are allowed to enter a cell (FIG. 2a), thus acquisition and protection of public goods. In this Opinion article, we propose that minimizing potential routes of infection and intake of harmful substances. -

The Ecology and Feeding Biology of Thecate
-1- THE ECOLOGY AND FEEDING BIOLOGY OF THECATE HETEROTROPHIC DINOFLAGELLATES by Dean Martin Jacobson A.B., Occidental College 1979 SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY at the Massachusetts Institute of Technology and the Woods Hole Oceanographic Institution February, 1987 e Dean Martin Jacobson The author hereby grants to M.I.T. and W.H.O.I. permission to reproduce and to distribute copies of this thesis document in whole or in part. Signature of Au thor_--.....~-=-~~_ ...........~iIlfII"I'V"-...........,.;..p;-~~ _ Department of Biology, Ma sac usetts Institute of Technology and the Joint Program in Ocea og aphy, Massachusetts Institute of Technology/Woods Hole Ocea graphic Institution, February, 1986. Certified by _----L~...-:c-.:.• ......:::z:..::-~-::..,.c£....=:....------:...--------------- Donald M. A~rsont Thesis Supervisor Accepted by --"X:,,-==~,e:--..;;-,------.;;;,.-------------------- Sallie W. Chisholm, Chairman, Joint Committee for Biological Oceanography, Massachusetts Institute of Technology/Woods Hole Oceanographic Institution. -2- -3- Table of Contents List of Figures and Tables 5 Abstract. 7 Aknow1edgements •••••••••••.••••••••••••••••••••••••••.•••••••••••••.•• 9 Introduction 11 References .••••••••••••••••••••••••••••••••••••••••••••••••••••. 21 Chapter 1. Population Dynamics of Heterotrophic Dinoflagellates in a Temperate Esturary •••••••••••••••••••••••••••••••••••• 23 Abstract 25 Introduction ••••..•••.••.••••••.•••••••••••.•••••••••••.•••.••.• 26 Methods -

Amoebae in the Rhizosphere and Their Interactions
Amoebae in the rhizosphere and their interactions with arbuscular mycorrhizal fungi : effects on assimilate partitioning and nitrogen availability for plants Robert Koller To cite this version: Robert Koller. Amoebae in the rhizosphere and their interactions with arbuscular mycorrhizal fungi : effects on assimilate partitioning and nitrogen availability for plants. Agricultural sciences. Institut National Polytechnique de Lorraine, 2008. English. NNT : 2008INPL080N. tel-01753052 HAL Id: tel-01753052 https://hal.univ-lorraine.fr/tel-01753052 Submitted on 29 Mar 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. AVERTISSEMENT Ce document est le fruit d'un long travail approuvé par le jury de soutenance et mis à disposition de l'ensemble de la communauté universitaire élargie. Il est soumis à la propriété intellectuelle de l'auteur. Ceci implique une obligation de citation et de référencement lors de l’utilisation de ce document. D'autre part, toute contrefaçon, plagiat, reproduction illicite encourt une poursuite pénale. Contact : [email protected] -
General Morphology, Life-Cycles, Adaptations and Classification of Protozoan
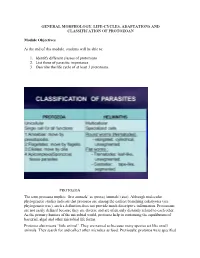
GENERAL MORPHOLOGY, LIFE-CYCLES, ADAPTATIONS AND CLASSIFICATION OF PROTOZOAN Module Objectives At the end of this module, students will be able to: 1. Identify different classes of protozoans 2. List those of parasitic importance 3. Describe the life cycle of at least 3 protozoans. PROTOZOA The term protozoa implies ‘first animals’ as (proto) 'animals' (zoa). Although molecular phylogenetic studies indicate that protozoa are among the earliest branching eukaryotes (see phylogenetic tree), such a definition does not provide much descriptive information. Protozoans are not easily defined because they are diverse and are often only distantly related to each other. As the primary hunters of the microbial world, protozoa help in continuing the equilibrium of bacterial, algal and other microbial life forms. Protozoa also means ‘little animal’. They are named so because many species act like small animals. They search for and collect other microbes as food. Previously, protozoa were specified as unicellular protists possessing animal-like characteristics such as the capability to move in water. Protists are a class of eukaryotic microorganisms which are a part of the kingdom Protista. Protozoa possess typical eukaryotic organelles and in general exhibit the typical features of other eukaryotic cells. For example, a membrane bound nucleus containing the chromosomes is found in all protozoan species. However, in many protozoan species some of the organelles may be absent, or are morphologically or functionally different from those found in other eukaryotes. In addition, many of the protozoa have organelles that are unique to a particular group of protozoa. The term ‘protozoan’ has become debatable. Modern science has shown that protozoans refer to a very complex group of organisms that do not form a clade or monophylum. -

The Diverse Nutrient Strategies of Harmful Algae: Focus on Osmotrophy
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/226106314 The Diverse Nutrient Strategies of Harmful Algae: Focus on Osmotrophy Chapter · January 2006 DOI: 10.1007/978-3-540-32210-8_13 CITATIONS READS 58 449 2 authors: P. M. Glibert Catherine Legrand University of Maryland Center for Environmental Science Linnaeus University 260 PUBLICATIONS 19,824 CITATIONS 97 PUBLICATIONS 3,119 CITATIONS SEE PROFILE SEE PROFILE Some of the authors of this publication are also working on these related projects: Harmful Algal bloom View project Harmful algae in Chesapeake Bay: A study focused on Karlodinium veneficum applying time series, physiological, and modeling approaches View project All content following this page was uploaded by P. M. Glibert on 17 May 2014. The user has requested enhancement of the downloaded file. 13 The Diverse Nutrient Strategies of Harmful Algae: Focus on Osmotrophy P.M. Glibert and C. Legrand 13.1 Introduction and Terminology Ever since the discovery of microscopic flagellates, the manner in which they sustain themselves has been a topic of interest. Indeed, in 1677 Anthoni van Leeuwenhoek proposed to call the flagellates that he observed ‘animalcules’ after observing their motion, “When these animalcules bestirred ‘emselves, they sometimes stuck out two little horns, which were continually moved, after the fashion of a horse’s ears“ (re-quoted by Milius 1999). Today, there is much interest in identifying the mode of nutrition of plankton, especially harmful algae, for a variety of reasons.As many harmful algal blooms (HABs) have been associated with eutrophication and/or alterations in the amount and form of nutrients supplied (reviewed by Glibert et al. -

Dimensions of Biodiversity in the Earth Mycobiome
REVIEWS MICROBIOME Dimensions of biodiversity in the Earth mycobiome Kabir G. Peay1, Peter G. Kennedy2,3 and Jennifer M. Talbot4 Abstract | Fungi represent a large proportion of the genetic diversity on Earth and fungal activity influences the structure of plant and animal communities, as well as rates of ecosystem processes. Large-scale DNA-sequencing datasets are beginning to reveal the dimensions of fungal biodiversity, which seem to be fundamentally different to bacteria, plants and animals. In this Review, we describe the patterns of fungal biodiversity that have been revealed by molecular-based studies. Furthermore, we consider the evidence that supports the roles of different candidate drivers of fungal diversity at a range of spatial scales, as well as the role of dispersal limitation in maintaining regional endemism and influencing local community assembly. Finally, we discuss the ecological mechanisms that are likely to be responsible for the high heterogeneity that is observed in fungal communities at local scales. Next-generation sequencing If you look closely at any terrestrial scene, you will see the ability to form a network of interconnected filaments 1 2 3,4 (NGS). A set of DNA-sequencing fungal hyphae twisting around plants , animals , soil (known as a mycelium) as primary somatic tissue. Single- platforms (including those and even bacteria5 (FIG. 1). Although not often obvious to celled fungi2 can predominate in some liquid or stressful produced by 454 and Illumina) the naked eye, fungi are as deeply enmeshed in the evo- environments13, such as anaerobic gut rumen14, floral nec- that have increased sequencing 15 16 output and decreased cost by lutionary history and ecology of life as any other organ- tar or deep marine sediments , in which filamentous orders of magnitude compared ism on Earth. -

Pentaradial Eukaryote Suggests Expansion of Suspension Feeding in White Sea‑Aged Ediacaran Communities Kelsie Cracknell1, Diego C
www.nature.com/scientificreports OPEN Pentaradial eukaryote suggests expansion of suspension feeding in White Sea‑aged Ediacaran communities Kelsie Cracknell1, Diego C. García‑Bellido2,3, James G. Gehling3, Martin J. Ankor4, Simon A. F. Darroch5,6 & Imran A. Rahman7* Suspension feeding is a key ecological strategy in modern oceans that provides a link between pelagic and benthic systems. Establishing when suspension feeding frst became widespread is thus a crucial research area in ecology and evolution, with implications for understanding the origins of the modern marine biosphere. Here, we use three‑dimensional modelling and computational fuid dynamics to establish the feeding mode of the enigmatic Ediacaran pentaradial eukaryote Arkarua. Through comparisons with two Cambrian echinoderms, Cambraster and Stromatocystites, we show that fow patterns around Arkarua strongly support its interpretation as a passive suspension feeder. Arkarua is added to the growing number of Ediacaran benthic suspension feeders, suggesting that the energy link between pelagic and benthic ecosystems was likely expanding in the White Sea assemblage (~ 558–550 Ma). The advent of widespread suspension feeding could therefore have played an important role in the subsequent waves of ecological innovation and escalation that culminated with the Cambrian explosion. Te late Ediacaran (~ 571–541 Ma) was a pivotal interval in Earth’s history, which saw the initial radiation of large and complex multicellular eukaryotes (the so-called ‘Ediacaran macrobiota’), including some of the frst animals1–3. Although Ediacaran ecosystems were, for many years, thought to have been fundamentally diferent from Cambrian ones4,5, there is growing evidence that they were more similar than previously thought, especially in terms of the construction and organization of communities, presence of key feeding strategies, and diversity of life modes6–9. -

Ecophysiology of Mixotrophs
Ecophysiology of mixotrophs Erwin Schoonhoven January 19, 2000 Contents 1 Introduction 3 1.1 Definition of the mixotroph . 3 2 Different strategies in mixotrophy 6 3 Mixotrophic organisms and their ways of mixotrophic feeding 8 3.1 Mixotrophic organisms . 8 3.1.1 Phytoplankton . 8 3.1.2 Planktonic ciliates . 8 3.1.3 Cyanobacteria . 9 3.1.4 Zooplankton, multicellular organisms . 9 3.2 Mixotrophic feeding . 9 3.2.1 Obligate mixotrophs . 9 3.2.2 Facultative mixotrophs . 10 3.2.3 `True' facultative mixotrophs . 14 4 Basics of feeding 16 4.1 Usage of both strategies in a obligate mixotroph . 16 4.2 Switching in a facultative mixotroph . 16 4.2.1 Facultative mixotroph that is obligate phototrophic . 17 4.2.2 Facultative mixotroph that is obligate heterotrophic . 17 4.3 Switching in the `true' facultative mixotroph . 18 5 Conceptual dynamics of feeding 20 5.1 Usage of both strategies in the obligate mixotroph . 20 5.2 Switching in the facultative mixotroph . 21 5.2.1 Facultative mixotroph that is obligate phototrophic . 22 5.2.2 Facultative mixotroph that is obligate heterotrophic . 23 5.3 Dynamics of feeding in the `true' facultative mixotroph . 24 6 Models for mixotrophy 27 6.0.1 A list of data on the ecophysiology of mixotrophs . 28 7 Symbiosis and mixotrophy, the same thing? 29 8 Conclusions 31 2 Chapter 1 Introduction 1.1 Definition of the mixotroph Mixotrophy is defined as the capability of one organism to be autotrophic and heterotrophic at the same time. Therefor an organism that can survive in water as a chemolitho-autotroph and, at the same time, is capable of ingestion and digestion of organic compounds from human blood, is called a mixotroph.