A Technique for Determining Viable Military Logistics Support Alternatives
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THE LOGISTICS of the FIRST CRUSADE 1095-1099 a Thesis Presented to the Faculty of the Graduate School of Wester
FEEDING VICTORY: THE LOGISTICS OF THE FIRST CRUSADE 1095-1099 A Thesis presented to the faculty of the Graduate School of Western Carolina University in partial fulfilment of the requirements for the degree of Master of Arts in History By William Donald O’Dell, Jr. Director: Dr. Vicki Szabo Associate Professor of Ancient and Medieval History History Department Committee Members: Dr. David Dorondo, History Dr. Robert Ferguson, History October, 2020 ACKNOWLEDGEMENTS I would like to thank my committee members and director for their assistance and encouragements. In particular, Dr. Vicki Szabo, without whose guidance and feedback this thesis would not exist, Dr. David Dorondo, whose guidance on the roles of logistics in cavalry warfare have helped shaped this thesis’ handling of such considerations and Dr. Robert Ferguson whose advice and recommendations for environmental historiography helped shaped my understanding on how such considerations influence every aspect of history, especially military logistics. I also offer my warmest regards and thanks to my parents, brothers, and extended family for their continued support. ii TABLE OF CONTENTS List of Figures ................................................................................................................................ iv Abstract ............................................................................................................................................v Introduction ......................................................................................................................................1 -

The Quandary of Allied Logistics from D-Day to the Rhine
THE QUANDARY OF ALLIED LOGISTICS FROM D-DAY TO THE RHINE By Parker Andrew Roberson November, 2018 Director: Dr. Wade G. Dudley Program in American History, Department of History This thesis analyzes the Allied campaign in Europe from the D-Day landings to the crossing of the Rhine to argue that, had American and British forces given the port of Antwerp priority over Operation Market Garden, the war may have ended sooner. This study analyzes the logistical system and the strategic decisions of the Allied forces in order to explore the possibility of a shortened European campaign. Three overall ideas are covered: logistics and the broad-front strategy, the importance of ports to military campaigns, and the consequences of the decisions of the Allied commanders at Antwerp. The analysis of these points will enforce the theory that, had Antwerp been given priority, the war in Europe may have ended sooner. THE QUANDARY OF ALLIED LOGISTICS FROM D-DAY TO THE RHINE A Thesis Presented to the Faculty of the Department of History East Carolina University In Partial Fulfillment of the Requirements for the Degree Master of Arts in History By Parker Andrew Roberson November, 2018 © Parker Roberson, 2018 THE QUANDARY OF ALLIED LOGISTICS FROM D-DAY TO THE RHINE By Parker Andrew Roberson APPROVED BY: DIRECTOR OF THESIS: Dr. Wade G. Dudley, Ph.D. COMMITTEE MEMBER: Dr. Gerald J. Prokopowicz, Ph.D. COMMITTEE MEMBER: Dr. Michael T. Bennett, Ph.D. CHAIR OF THE DEP ARTMENT OF HISTORY: Dr. Christopher Oakley, Ph.D. DEAN OF THE GRADUATE SCHOOL: Dr. Paul J. -

The Nature of Logistics
Chapter 1 The Nature of Logistics “Throughout the struggle, it was in his logistic inability to maintain his armies in the field that the enemy’s fatal weak- ness lay. Courage his forces had in full measure, but courage was not enough. Reinforcements failed to arrive, weapons, ammunition and food alike ran short, and the dearth of fuel caused their powers of tactical mobility to dwindle to the van- ishing point. In the last stages of the campaign they could do little more than wait for the Allied advance to sweep over them.”1 —Dwight Eisenhower “As we select our forces and plan our operations, . [w]e must understand how logistics can impact on our concepts of operation. Commanders must base all their concepts of operations on what they know they can do logistically.”2 —A. M. Gray, Jr. MCDP 4 The Nature of Logistics o conduct logistics effectively, we must first under-stand T its fundamental nature—its purpose and its characteris- tics—as well as its relationship to the conduct of military op- erations. This understanding will become the basis for developing a theory of logistics and a practical guide to its application. WHAT IS LOGISTICS? Logistics is the science of planning and carrying out the move- ment and maintenance of forces.3 Logistics provides the re- sources of combat power, positions those resources on the battlefield, and sustains them throughout the execution of op- erations. Logistics encompasses a wide range of actions and the relationships among those actions, as well as the resources that make those actions possible. -
China's Logistics Capabilities for Expeditionary Operations
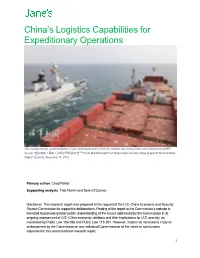
China’s Logistics Capabilities for Expeditionary Operations The modular transfer system between a Type 054A frigate and a COSCO container ship during China’s first military-civil UNREP. Source: “重大突破!民船为海军水面舰艇实施干货补给 [Breakthrough! Civil Ships Implement Dry Cargo Supply for Naval Surface Ships],” Guancha, November 15, 2019 Primary author: Chad Peltier Supporting analysts: Tate Nurkin and Sean O’Connor Disclaimer: This research report was prepared at the request of the U.S.-China Economic and Security Review Commission to support its deliberations. Posting of the report to the Commission's website is intended to promote greater public understanding of the issues addressed by the Commission in its ongoing assessment of U.S.-China economic relations and their implications for U.S. security, as mandated by Public Law 106-398 and Public Law 113-291. However, it does not necessarily imply an endorsement by the Commission or any individual Commissioner of the views or conclusions expressed in this commissioned research report. 1 Contents Abbreviations .......................................................................................................................................................... 3 Executive Summary ............................................................................................................................................... 4 Methodology, Scope, and Study Limitations ........................................................................................................ 6 1. China’s Expeditionary Operations -

The Lifeblood of Military Power Military of Lifeblood the Logistics
Logistics: The Lifeblood of Military Power John E. Wissler, Lieutenant General, USMC (Ret.) The end for which a soldier is recruited, therefore affects every aspect of organizing, clothed, armed, and trained, the whole training, equipping, deploying, and employing objective of his sleeping, eating, drinking, and the force. marching is simply that he should fight at the Logistics is perhaps the most complex right place and the right time. and interrelated capability provided by to- —Major-General Carl von Clausewitz, On War day’s military. Unfortunately, to those unfa- miliar with its intellectual and technological he term “logistics” was not commonly used breadth, depth, and complexity, it can be con- Tuntil shortly before World War II, but the sidered an assumed capability—something concept and understanding of logistics have that simply happens—or, worse yet, a “back been around since the earliest days of warfare. office” function that is not connected to war- In Clausewitz’s words, getting the force to the fighting capability. “fight at the right place and the right time”1 is The success of military logistics during the the true essence of military logistics. past 16-plus years of overseas combat opera- The Merriam-Webster online dictionary tions is partly to blame for anyone’s assump- defines logistics as “the aspect of military sci- tion that continued logistical success in the ence dealing with the procurement, mainte- ever-changing national security environment nance, and transportation of military materiel, is a given across the entirety of the military lo- facilities, and personnel.”2 The Joint Chiefs of gistics enterprise. -

Case-Study-Phillip-Murgatroyd-39.Pdf
Medieval Warfare on the Grid Challenges Phil Murgatroyd This project uses agent-based modelling in a distributed environment to help The VISTA Centre understand how medieval states moved and fed armies. Institute of Archaeology and Antiquity University of Birmingham Background Edgbaston, Birmingham The movement of large numbers of people across a pre-industrial landscape B15 2TT UK presents a series of significant logistical challenges. When logistical systems broke down, armies failed and states sometimes collapsed. Given its impor- Contact Details tance to the state and its inhabitants, medieval military logistics has been slow [email protected] to utilise computer modelling techniques in order to understand the complex Product Used processes involved. This project takes as a case study the march of the Byz- Java antine army to the battle of Manzikert in AD1071 and models the army on a Blender 1:1 basis, tracing the movement and status of each individual. The Byzantine C++ army probably numbered over 40,000 and travelled more than 700 miles from PDES-MAS Constantinople to Manzikert through the Mediterranean summer. By model- ling different scenarios regarding the size and composition of the army, the Funding different possible routes and differing levels of food availability the project JISC-EPSRC-AHRC eScience Project seeks to generate a set of plausible parameters within which the fragmentary historical record can be placed. These results can then be rendered in both Contributors 2d and 3d images or animations, enabling them to be more easily understood Prof. Vince Gaffney Dr. John Haldon by people unused to traditional agent-based modelling outputs. -

Contemporary Challenges in Military Logistics Support
CONTEMPORARY CHALLENGES IN MILITARY LOGISTICS SUPPORT MSc Marta PAWELCZYK Management and Command Faculty War Studies University, Warsaw, Poland Abstract Nowadays, the most important factors that cause global market activity and have a big infl uence on logistics processes are: globalisation and rapid development of new technologies. In that environment, military logistics are operating incessantly alongside the supply of goods in times of war, peace and crisis. Th ese logistics are focused on fi nding solutions for being more eff ective and economically profi table. Because of this, logisticians try to reduce costs and supply good faster, as well as trying to provide the right quality and service.. Th e current challenges in military logistics support have changed. Th e biggest challenge for all logistics processes is to provide services according to the 7R formula (right time, right product, right quantity, right condition, right place, right customer, and right price). A logistics leader is important for every operational mission. Th anks to the leader making quick and smart decisions, successful termination of a mission is possible. Th e article is based on the example of logistics support for the Polish contingent in Kosovo. In the light of the above, the aim of the article is to identify and estimate the situation of military logistics. Th e research problem is as follow: What are the biggest determinants of logistics processes in military area? Key words: logistics, military logistics, challenges, supply chains, national contingent. © 2018 Marta Pawelczyk, published by War Studies University, Poland This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License. -

Sustainment of Army Forces in Operation Iraqi Freedom
THE ARTS This PDF document was made available from www.rand.org as CHILD POLICY a public service of the RAND Corporation. CIVIL JUSTICE EDUCATION Jump down to document ENERGY AND ENVIRONMENT 6 HEALTH AND HEALTH CARE INTERNATIONAL AFFAIRS The RAND Corporation is a nonprofit research NATIONAL SECURITY organization providing objective analysis and POPULATION AND AGING PUBLIC SAFETY effective solutions that address the challenges facing SCIENCE AND TECHNOLOGY the public and private sectors around the world. SUBSTANCE ABUSE TERRORISM AND HOMELAND SECURITY TRANSPORTATION AND Support RAND INFRASTRUCTURE Purchase this document WORKFORCE AND WORKPLACE Browse Books & Publications Make a charitable contribution For More Information Visit RAND at www.rand.org Explore RAND Arroyo Center View document details Limited Electronic Distribution Rights This document and trademark(s) contained herein are protected by law as indicated in a notice appearing later in this work. This electronic representation of RAND intellectual property is provided for non-commercial use only. Permission is required from RAND to reproduce, or reuse in another form, any of our research documents. This product is part of the RAND Corporation monograph series. RAND monographs present major research findings that address the challenges facing the public and private sectors. All RAND monographs undergo rigorous peer review to ensure high standards for research quality and objectivity. Sustainment of Army Forces in Operation Iraqi Freedom Battlefield Logistics and Effects on Operations Eric Peltz, John M. Halliday, Marc L. Robbins, Kenneth J. Girardini Prepared for the United States Army Approved for public release; distribution unlimited The research described in this report was sponsored by the United States Army under Contract No. -

Thinking Effects Mann, Endersby, & Searle Effects-Based Methodology for Joint Operations - Cut Along Dotted Line
- After you have read the research report, please give us your frank opinion on the con- tents. All comments––large or small, compli- mentary or caustic––will be appreciated. Mail them to CADRE/AR, Building 1400, 401 Chennault Circle, Maxwell AFB AL 36112- 6428. Thinking Effects Mann, Endersby, & Searle Effects-Based Methodology for Joint Operations - Cut along dotted line Thank you for your assistance. - COLLEGE OF AEROSPACE DOCTRINE, RESEARCH AND EDUCATION AIR UNIVERSITY Thinking Effects Effects-Based Methodology for Joint Operations EDWARD C. MANN III Colonel, USAF, Retired GARY ENDERSBY Lieutenant Colonel, USAF, Retired THOMAS R. SEARLE Research Fellow CADRE Paper No. 15 Air University Press Maxwell Air Force Base, Alabama 36112-6615 http://aupress.maxwell.af.mil October 2002 Air University Library Cataloging Data Mann, Edward C., 1947- Thinking effects : effects-based methodology for joint operations / Edward C. Mann III, Gary Endersby, Thomas R. Searle. p. cm. – (CADRE paper ; 15). Includes bibliographical references. Contents: Time for a new paradigm? – Historical background on effects – Conceptual basis for effects – A general theory of joint effects-based operations – An idealized joint EBO process – What are the major challenges in implementing the EBO methodology? ISBN 1-58566-112-0 ISSN 1537-3371 1. Operational art (Military science). 2. Unified operations (Military science) – Planning. 3. Military doctrine – United States. I. Endersby, Gary. II. Searle, Thomas R., 1960- III. Title. IV. Series. 355.4––dc21 Disclaimer Opinions, conclusions, and recommendations expressed or implied within are solely those of the author and do not necessarily represent the views of Air University, the United States Air Force, the Department of Defense, or any other US government agency. -

Vauban!S Siege Legacy In
VAUBAN’S SIEGE LEGACY IN THE WAR OF THE SPANISH SUCCESSION, 1702-1712 DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Jamel M. Ostwald, M.A. The Ohio State University 2002 Approved by Dissertation Committee: Professor John Rule, Co-Adviser Co-Adviser Professor John Guilmartin, Jr., Co-Adviser Department of History Professor Geoffrey Parker Professor John Lynn Co-Adviser Department of History UMI Number: 3081952 ________________________________________________________ UMI Microform 3081952 Copyright 2003 by ProQuest Information and Learning Company. All rights reserved. This microform edition is protected against unauthorized copying under Title 17, United States Code. ____________________________________________________________ ProQuest Information and Learning Company 300 North Zeeb Road PO Box 1346 Ann Arbor, MI 48106-1346 ABSTRACT Over the course of Louis XIV’s fifty-four year reign (1661-1715), Western Europe witnessed thirty-six years of conflict. Siege warfare figures significantly in this accounting, for extended sieges quickly consumed short campaign seasons and prevented decisive victory. The resulting prolongation of wars and the cost of besieging dozens of fortresses with tens of thousands of men forced “fiscal- military” states to continue to elevate short-term financial considerations above long-term political reforms; Louis’s wars consumed 75% or more of the annual royal budget. Historians of 17th century Europe credit one French engineer – Sébastien le Prestre de Vauban – with significantly reducing these costs by toppling the impregnability of 16th century artillery fortresses. Vauban perfected and promoted an efficient siege, a “scientific” method of capturing towns that minimized a besieger’s casualties, delays and expenses, while also sparing the town’s civilian populace. -

Patton and Logistics of the Third Army
Document created: 20 March 03 Logistics and Patton’s Third Army Lessons for Today’s Logisticians Maj Jeffrey W. Decker Preface When conducting serious study of any operational campaign during World War II, the military student quickly realizes the central role logistics played in the overall war effort. Studying the operations of General George S. Patton and his Third United States Army during 1944-45 provides all members of the profession of arms—especially the joint logistician—valuable lessons in the art and science of logistics during hostilities. Future conflicts will not provide a two or three year "trial and error" logistics learning curve; rather, the existing sustainment infrastructure and its accompanying logisticians are what America’s armed forces will depend on when the fighting begins. My sincere thanks to Dr. Richard R. Muller for his guiding assistance completing this project. I also want to thank the United States Army Center of Military History for providing copies of the United States Army in World War II official histories and Lt Col (S) Clete Knaub for his editing advice and counsel. Finally, thanks go to my wife Misty for her support writing this paper; her grandfather, Mark Novick for his wisdom and guidance during the preparation of this project; and to his brother David, a veteran of the Third United States Army. I dedicate this project to him. Abstract George S. Patton and his Third Army waged a significant combined arms campaign on the Western Front during 1944-45. Both his military leadership and logistics acumen proved decisive against enemy forces from North Africa to the Rhine River. -

Title: Defence Logistics Special Issue Editorial: an Important Research Field in Need of Researchers
Defence logistics: an important research field in need of researchers Author Yoho, KD, Rietjens, S, Tatham, P Published 2013 Journal Title Intnernational Journal of Physical Distribution & Logistics Management DOI https://doi.org/10.1108/IJPDLM-03-2012-0079 Copyright Statement © 2013 Emerald. This is the author-manuscript version of this paper. Reproduced in accordance with the copyright policy of the publisher. Please refer to the journal's website for access to the definitive, published version. Downloaded from http://hdl.handle.net/10072/52689 Griffith Research Online https://research-repository.griffith.edu.au Title: Defence Logistics Special Issue Editorial: An Important Research Field in Need of Researchers Abstract Purpose – The purpose of this paper is to provide an introduction to the defence logistics special issue and to provide an overview of the contribution to defence logistics research of each of the papers contained therein. A review of the field of defence logistics is offered, together with a discussion of the historical and contemporary issues that have confronted researchers and practitioners. Current research is described, and a research agenda is proposed. Design/methodology/approach – The editorial provides a conceptual discussion of defence logistics as it has been studied in the past and is being studied in the present, and a reflection on the ways in which past research can usefully inform future research agendas. Findings – In light of the current state of defence logistics research and the anticipated characteristics of future combat operations, the paper highlights areas where academic research has the potential to make a significant contribution in the development and choice of alternative approaches in the provision of defence logistics Research limitations/implications – A future research agenda is proposed that is informed by recent transformations in the conduct of warfare, as well as through anticipated changes in the global strategic landscape.