Clinical Utility of the Taylor Spatial Frame for Limb Deformities
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Loss of Correction in Cubitus Varus Deformity After Osteotomy
Loss of correction in cubitus varus deformity after osteotomy Chao You Shenzhen children's hospital Yibiao Zhou Shenzhen children's hospital https://orcid.org/0000-0001-9754-1089 Jingming Han ( [email protected] ) Research article Keywords: cubitus varus osteotomy Loss of correction Posted Date: May 5th, 2020 DOI: https://doi.org/10.21203/rs.3.rs-26279/v1 License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License Page 1/14 Abstract Purpose Cubitus varus deformity in the pediatric population is an infrequent but clinically important disease to orthopedic surgeons. Since these patient populations are different in many respects, we sought out to investigate the rates of loss of correction over time as well as the factors associated with loss of correction in pediatric patients undergoing osteotomy for treatment of cubitus varus deformity. Methods Between 2008-7 and 2017-7, we treated 30 cases of cubital varus had underwent the the osteotomy. We compared preoperative and postoperative clinical and imaging parameters (H-cobb angle,Baumman angle) for all patients. Postoperative evaluation was performed by telephone interview. Results In our study,there were 30 patients,included 17 males and 13 females.the mean age was 75 months old.In the rst follow-up,Approximately 80 % of patients had a loss of correction of H-cobband 83% of patients at the second follow-up. The Baumann angle also had a loss of correction,about 57% was lost at the rst follow-up,and 43% was lost at the second follow-up. The average interval between the rst follow-up and the second follow-up was 24 days The H-cobb angle mean loss was 2.4°.There was a statistically signicant difference between the H-cobb angle measured before surgery and the angle measured after surgery (p <0.05). -
Efficacy and Safety of a Novel Personalized Navigation Template in Proximal Femoral Corrective Osteotomy for the Treatment of DDH Qiang Shi1,2 and Deyi Sun1*
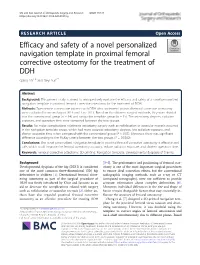
Shi and Sun Journal of Orthopaedic Surgery and Research (2020) 15:317 https://doi.org/10.1186/s13018-020-01843-y RESEARCH ARTICLE Open Access Efficacy and safety of a novel personalized navigation template in proximal femoral corrective osteotomy for the treatment of DDH Qiang Shi1,2 and Deyi Sun1* Abstract Background: This present study is aimed to retrospectively evaluate the efficacy and safety of a novel personalized navigation template in proximal femoral corrective osteotomy for the treatment of DDH. Methods: Twenty-nine consecutive patients with DDH who underwent proximal femoral corrective osteotomy were evaluated between August 2013 and June 2017. Based on the different surgical methods, they were divided into the conventional group (n = 14) and navigation template group (n = 15). The osteotomy degrees, radiation exposure, and operation time were compared between the two groups. Results: No major complications relating to osteotomy surgery such as redislocation or avascular necrosis occurred in the navigation template group, which had more accurate osteotomy degrees, less radiation exposure, and shorter operation time when compared with the conventional group (P < 0.05). Moreover, there was significant difference according to the McKay criteria between the two groups (P = 0.0362). Conclusions: The novel personalized navigation template in proximal femoral corrective osteotomy is effective and safe, which could improve the femoral osteotomy accuracy, reduce radiation exposure, and shorten operation time. Keywords: Femoral corrective osteotomy, 3D printing, Navigation template, Developmental dysplasia of the hip Background [3–5]. The performance and positioning of femoral oste- Developmental dysplasia of the hip (DDH) is considered otomy is one of the most important surgical procedures one of the most common three-dimensional (3D) hip to ensure ideal correction effects, but the conventional deformities in children [1]. -
1 Tips7pp P654-660CR2.Indd
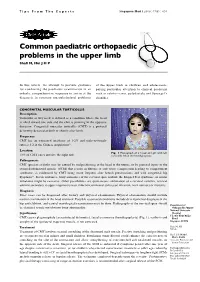
Tips From The Experts SingaporeSingapore Med Med J 2006; J 2006; 47(8) 47(8) : 654 : 1 Common paediatric orthopaedic problems in the upper limb Shafi M, Hui J H P In this article, we attempt to provide guidance of the upper limb in children and adolescents, for conducting the paediatric examination in an paying particular attention to clinical problems orderly, comprehensive sequence to arrive at the such as cubitus varus, polydactyly and Sprengel’s diagnosis in common musculoskeletal problems shoulder. CONGENITAL MUSCULAR TORTICOLLIS Description Torticollis or wry neck is defined as a condition where the head is tilted toward one side and the chin is pointing in the opposite direction. Congenital muscular torticollis (CMT) is a postural deformity detected at birth or shortly after birth. Frequency CMT has an estimated incidence of 1-2% and male-to-female ratio is 3:2 in the Chinese population(1). Location Fig. 1 Photograph of a 3-year-old girl with left 75% of CMT cases involve the right side. torticollis. Note the hemihypoplasia. Pathogenesis CMT (present at birth) may be caused by malpositioning of the head in the uterus, or by prenatal injury to the sternocleidomastoid muscle (SCM) that results in fibrosis or soft tissue compression leading to compartment syndrome, as evidenced by CMT being more frequent after breech presentations and with congenital hip dysplasia(2). In rare instances, bony anomalies of the cervical spine include the Klippel-Feil syndrome, or ocular imbalance might be causative. Other possibilities are spontaneous subluxation of a cervical vertebra, cervical adenitis secondary to upper respiratory tract infection, unilateral soft tissue infection, neck tumours or myositis. -

Expanded Indications for Guided Growth in Pediatric Extremities
Current Concept Review Expanded Indications for Guided Growth in Pediatric Extremities Teresa Cappello, MD Shriners Hospitals for Children, Chicago, IL Abstract: Guided growth for coronal plane knee deformity has successfully historically been utilized for knee val- gus and knee varus. More recent use of this technique has expanded its indications to correct other lower and upper extremity deformities such as hallux valgus, hindfoot calcaneus, ankle valgus and equinus, rotational abnormalities of the lower extremity, knee flexion, coxa valga, and distal radius deformity. Guiding the growth of the extremity can be successful and is a low morbidity method for correcting deformity and should be considered early in the treatment of these conditions when the child has a minimum of 2 years of growth remaining. Further expansion of the application of this concept in the treatment of pediatric limb deformities should be considered. Key Concepts: • Guiding the growth of pediatric physes can successfully correct a variety of angular and potentially rotational deformities of the extremities. • Guided growth can be performed using a variety of techniques, from permanent partial epiphysiodesis to tem- porary methods utilizing staples, screws, or plate and screw constructs. • Utilizing the potential of growth in the pediatric population, guided growth principals have even been success- fully applied to correct deformities such as knee flexion contractures, hip dysplasia, femoral anteversion, ankle deformities, hallux valgus, and distal radius deformity. Introduction Guiding the growth of pediatric orthopaedic deformities other indications and uses for guided growth that may is represented by the symbol of orthopaedics itself, as not have wide appreciation. the growth of a tree is guided as it is tethered to a post (Figure 1). -

Malunion of Long Bones
Malunion of long bones Andreas Panagopoulos Assistant professor in Orthopaedics University Hospital of Patras Definition A malunited fracture is one that has healed with the fragments in a non- anatomical position Acceptability of fracture reduction alignment rotation normal length actual position of fragments (least important) Classification Based to location Intrarticular Metaphsial Diaphysial Based to complexity Simple (one plane) e.g. valgus-varus Complex ( multi planes) However, some malalignments are better tolerated from the neighboring joints than others (e.g. malunions of the upper extremity) Also lower leg valgus is more acceptable than varus This means there are both relative and absolute indications to correct deformities and leg length discrepancies Absolute Indications - Presence of disabling pain - Severe functional disability Relative Indications - Cosmetic reasons - No response to nonoperative treatment The object of surgery for malunion is to restore function Operative treatment for malunion of most fractures should not be considered until 6 to 12 months after the fracture has occurred. However, in intraarticular fractures, surgery may be required sooner if satisfactory function is to be restored When considering surgical correction of the malunion we should take in account: 1. Age of the patient 2. Socio-economic factors 3. The function of the joint 4. The bone stock and the degree of osteoporosis 5. The state of the soft tissue envelope Corrective surgery at the site of malunion is not always feasible. In some instances, -

Anatomy, Physical Examination and Imaging of Thoracic and Lumbosacral Spine
Anatomy, Physical Examination and Imaging of Thoracic and Lumbosacral Spine NGUYỄN THÀNH NHÂN LEARNING OBJECTIVES Understand: * Basic anatomy of the spine * Thoracic and Lumbar spine anatomy Understand basic imaging of X ray, CT Scan and MRI Identify and assess functions of the structures in clinical aspect: * Identify structures: inspection, palpation * Assess: Thoracic - Lumbar spine movements Understand: dermatomes, * SLR test, Bragard’s test, Neri’s test, … CONTENT Basic anatomy of the spine Thoracic - Lumbosacral spine anatomy Imaging of Thoracic - Lumbar spine Physical examination of Thoracic and Lumbar spine Anatomy Basic anatomy of the spine - The vertebral column consists of 33 vertebrae, - 5 segments: cervical, thoracic, lumbar, sacral, and coccygeal. - There are 7 cervical, 12 thoracic, 5 lumbar, 5 sacral, and 4 coccygeal vertebrae. - The two major exceptions are C1 (atlas) and C2 (axis) - Atlantoaxial joint - cervical rotation Anatomy Basic anatomy of the spine [1] Anatomy Basic anatomy of the spine [1] Anatomy Basic anatomy of the spine - The spinal cord - Conus medullaris: L1 - L2 - There are 8 cervical, 12 thoracic, 5 lumbar, and 5 sacral pairs, and 1 coccygeal pair of spinal nerves. - The sacral spinal nerves make up the cauda equina The neural anatomy is such that the spinal cord resides within the bony canal between C1 and L1 and/or L2. The filum terminale extends from the conus and attaches to the coccyx.[1] Anatomy Basic neurology of the spine - Gray matter + Spinal neurons (lower motor neurons), + Interneurons -

Ug Curriculum for Orthopaedics University of Delhi
UG CURRICULUM FOR ORTHOPAEDICS UNIVERSITY OF DELHI OBJECTIVES OF THE COURSE: At the end of the program, student should acquire the following: 1. Diagnose the common musculo-skeletal disease process from history, clinical examinations, interpretation of diagnostic tests and formulate a management path 2. Basic care of the injured patients in the emergency, triage, resuscitation, application of common splints and immobilization of spine, wound care etc. CLINICAL POSTING: 5th semester: 4 weeks 6th semester: 4 weeks 9th semester: 2 weeks The students posted for clinical postings in orthopaedics shall be divided into groups to attend the following: 1. Ward round: students should be present in the ward rounds taken by faculty members and participate in the discussion about the admitted patients. They are expected to learn use of various splints, tractions and other appliances used for patient care. 2. OPD: students are expected to see common orthopaedic cases coming to OPD and learn clinical examination to make provisional diagnosis and formulate a management plan. The faculty and senior residents are expected to teach the same to the students. 3. Emergency: Students are expected to attend and learn the basics of resuscitation, triage, management of polytrauma and multiple injured patients and splintage techniques for different fractures in emergency/casualty. 4. Clinical case presentation: Students are expected to present at least one clinical case every day to faculty or senior resident. The discussion should emphasize on history taking, clinical examination and planning out management. 5. Class: classes should be arranged to cover various parts of orthopaedics which is not covered in routine theory classes; for ex: instruments and implants, orthoses and prostheses, orthopaedic radiology, pathological specimens etc. -

The Orthopaedic Manifestations of Osteogenesis Imperfecta: a Collective Review
The Orthopaedic manifestations of Osteogenesis Imperfecta: A Collective Review By Bhatta A D Department of Orthopedic surgery Nelson Mandela School of Medicine KZN, South Africa Submitted in partial fulfilment of the academic requirements For the degree of MMed in the Department of Orthopaedics School of Clinical Medicine College of Health Sciences University of KwaZulu-Natal Durban 2016 (year) As the candidate’s supervisor I have approved this thesis for submission. Signed: Name: Prof M N Rasool Date: 24/02/2017 1 Declaration I Dr. AABASH DEV BHATTA declare that - (i) The research reported in this dissertation, except where otherwise indicated, and is my original work. (ii) This dissertation has not been submitted for any degree or examination at any other university. (iii) This dissertation does not contain other persons’ data, pictures, graphs or other information, unless specifically acknowledged as being sourced from other persons. (iv) This dissertation does not contain other persons’ writing, unless specifically acknowledged as being sourced from other researchers. Where other written sources have been quoted, then: a) Their words have been re-written but the general information attributed to them has been referenced; b) Where their exact words have been used, their writing has been placed inside quotation marks, and referenced. (v) Where I have reproduced a publication of which I am an author, co-author or editor, I have indicated in detail which part of the publication was actually written by myself alone and have fully referenced such publications. (vi) This dissertation does not contain text, graphics or tables copied and pasted from the Internet, unless specifically acknowledged, and the source being detailed in the dissertation and in the References sections. -

Cubitus Varus Deformity – Rationale of Treatment and Methods
Symposium International Journal of Paediatric Orthopaedics 2015 July-Sep;1(1):26-29 Cubitus Varus Deformity – Rationale of Treatment and Methods Sandeep Patwardhan1, Ashok K Shyam1 Abstract Cubitus varus is commonest complication of paediatric supracondylar humerus fracture. These deformities are most commonly result of malunion, however avascular necrosis of trochlea or growth arrest of medial physis may also cause the deformity. Cubitus varus mostly presents as cosmetic deformity but it may also cause posterolateral instability, increased risk of secondary fractures, tardy ulna nerve palsy and snapping elbow. Current trend is to offer surgical correction for cubitus varus deformity in form of supracondylar osteotomy of the humerus. Various kinds of surgical approaches, osteotomy configuration and fixation methods are described in literature. The main guiding principles in deformity correction should be complete correction of sagittal varus deformity, correction of hyperextension deformity in older children. Rotational deformities may not be corrected but some authors do recommend triplanar correction. In our view lateral closed wedge oblique equal limb osteotomy fixed with reconstruction plate offers best results and is enough to treat most of the cubitus varus cases with minimal complication. Keywords: cubitus varus, osteotomy, complications. Introduction factors for malunion are: the clinical significance of the same is still Cubitus varus or gunstock deformity as it is 1. Impacted / comminuted type I debatable [a] Cosmetic appearance still is commonly known is the most common supracondylar fractures the most common cause why the parents complication of displaced supracondylar 2. Rotationally unstable type II fractures bring their child to clinician. The above fractures in children with an incidence treated in a cast with subsequent loss of mentioned complications along with ranging from 3% to 57% [1]. -

Pediatric Orthopedics in Practice, DOI 10.1007/978-3-662-46810-4, © Springer-Verlag Berlin Heidelberg 2015 880 Backmatter
879 Backmatter Subject Index – 880 F. Hefti, Pediatric Orthopedics in Practice, DOI 10.1007/978-3-662-46810-4, © Springer-Verlag Berlin Heidelberg 2015 880 Backmatter Subject index Bold letters: Principal article Italics: Illustrations A Acetylsalicylic acid 303, 335 Adolescent scoliosis Amyloidosis 663 Acheiropodia 804 7 Scoliosis Amyoplasia 813–814 Abducent nerve paresis 752, Achievement by proxy 10, 11 AFO 7 Ankle Foot Orthosis Anaerobes 649, 652, 657 816 Achilles tendon Aggrecan 336, 367, 762 ANA 7 antinuclear antibodies Abducted pes planovalgus – lengthening 371, 426, 431, aggressive osteomyelitis Analysis, gait 488, 490–497 433, 434, 436, 439, 443, 464, 7 osteomyelitis, aggressive 7 Gait analysis Abduction contracture 468, 475, 485, 487–490, 493, Agonist 281, 487, 492, 493, Anchor 169, 312, 550, 734 7 contracture 496, 816, 838, 840 495, 498, 664, 832, 835, 840, Andersen classification abduction pants 219–221 – shortening 358, 418, 431, 868 7 classification, Andersen Abduction splint 212, 218–221, 433, 464, 465, 467, 468, 475, Ahn classification 366 Andry, Nicolas 21, 22 248, 850 489, 496, 838 Aitken classification (congenital Anesthesia 26, 38, 135, 154, Abduction Achondrogenesis 750, 751, femoral deficiency ) 7 classi- 162, 174, 221, 243, 247, 248, – hip 195, 198, 199, 212, 213, 756, 758–760, 769 fication, femoral deficiency 255, 281, 303, 385, 386, 400, 214, 218, 219, 220, 221, Achondroplasia 56, 163, 166, Akin osteotomy 477, 479 500, 506, 559, 568, 582–585, 241–245, 247, 248, 251, 255, 242, 270, 271, 353, 409, 628, Albers-Schönberg -

Salter-Harris Iii Fractures
HIGH YIELD PEDIATRIC BOARD EXAM BRANDON GREEN DO CHIEF OF PEDIATRIC ORTHOPEDICS NISWONGER CHILDRENS HOSPITAL ASSISTANT PROFESSOR EAST TENNESSEE STATE UNIVERSITY ORTHOPEDIC SURGERY RESIDENCY OBJECTIVES The following are the most commonly tested We will cover trauma, deformity, and Pediatric Orthopedic topics developmental issues Key words are still key…. FGFR-3? The most common skeletal dysplasia Mutation affects a single protein in fibroblast growth factor receptor-3 (FGFR- 3) gene, changing glycine to arginine at position 380. Result is growth retardation of the proliferative zone of the growth plate, resulting in short limbs. ACHONDROPLASIA The growth plates with the most growth (proximal humerus/distal femur) are most affected, resulting in rhizomelic (proximal more than distal) short stature. Extremities • trident hands (inability to approximate extended middle and ring finger) • bowed legs • radial head subluxation • muscular hypotonia Spine • thoracolumbar kyphosis- often resolves by walking age • short pedicles and decreased interpedicular distance from L1-S1 COMP? PSEUDOACHONDROPLASIA • SHORT-LIMBED RHIZOMELIC DWARFISM WITH NORMAL FACIAL FEATURES • AUTOSOMAL DOMINANT • MUTATION IS IN CARTILAGE OLIGOMERIC MATRIX PROTEIN (COMP) ON CHROMOSOME 19. • EPIPHYSES ARE DELAYED AND ABNORMAL, METAPHYSEAL FLARING IS PRESENT, AND EARLY ONSET OSTEOARTHRITIS (OA) IS COMMON. SULFATE TRANSPORT GENE??? DIASTROPHIC DYSPLASIA • AUTOSOMAL RECESSIVE • MUTATION IN SULFATE TRANSPORT PROTEIN THAT PRIMARILY AFFECTS CARTILAGE MATRIX. DIASTROPHIC DYSPLASIA -
UT Southwestern Orthopaedic Journal 2019-2020 from the Editor Table of Contents
Department of Orthopaedic Surgery UT Southwestern Orthopaedic Journal 2019-2020 From the Editor Table of Contents It is with great pleasure that I present the fourth annual edition of the UT Southwestern Orthopaedic Journal. This journal stays true to its original vision of providing program updates, highlighting faculty Message from the Chairman 2 and resident academic achievements, summarizing research, and displaying the camaraderie within the program. I would like to thank all the people who made this journal possible. Julie Mitchell and our Orthopaedic Surgery Program Overview/Teaching Sites 3 editing team, your tireless dedication to this journal is evident throughout its pages. Additionally, thank you to all the faculty and residents who have helped fill this journal by contributing their research and New Zealand Rotation 5 academic achievements. Orthopaedic Surgery Faculty 7 The 2019-2020 academic year was an incredibly exciting and busy time for UT Southwestern. Our department continued to grow stronger with the addition of new faculty members across multiple spe- Texas Scottish Rite Faculty 9 cialties. Additionally, we welcomed an excellent class of six new interns. Our scholarly output continued to flourish, as evidenced by our more than 125 publications featured in this journal. Furthermore, our Faculty with Secondary Appointments 11 faculty and residents had the privilege to share our research at podium and poster presentations around the world. Finally, we have now successfully sent 11 residents to train in Auckland, New Zealand. Orthopaedic Surgery Chief Residents/Family Photos 13 It’s hard to believe how quickly these five years have flown by for my class.