A Conceptual Design of an Inertial Navigation System for an Autonomous Submersible Testbed Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Use of Rudder on Boeing Aircraft
12ADOBL02 December 2011 Use of rudder on Boeing aircraft According to Boeing the Primary uses for rudder input are in crosswind operations, directional control on takeoff or roll out and in the event of engine failure. This Briefing Leaflet was produced in co-operation with Boeing and supersedes the IFALPA document 03SAB001 and applies to all models of the following Boeing aircraft: 707, 717, 727, 737, 747, 757, 767, 777, 787, DC-8, DC-9, DC-10, MD-10, md-11, MD-80, MD-90 Sideslip Angle Fig 1: Rudder induced sideslip Background As part of the investigation of the American Airlines Flt 587 crash on Heading Long Island, USA the United States National Transportation Safety Board (NTSB) issued a safety recommendation letter which called Flight path for pilots to be made aware that the use of “sequential full opposite rudder inputs can potentially lead to structural loads that exceed those addressed by the requirements of certification”. Aircraft are designed and tested based on certain assumptions of how pilots will use the rudder. These assumptions drive the FAA/EASA, and other certifica- tion bodies, requirements. Consequently, this type of structural failure is rare (with only one event over more than 45 years). However, this information about the characteristics of Boeing aircraft performance in usual circumstances may prove useful. Rudder manoeuvring considerations At the outset it is a good idea to review and consider the rudder and it’s aerodynamic effects. Jet transport aircraft, especially those with wing mounted engines, have large and powerful rudders these are neces- sary to provide sufficient directional control of asymmetric thrust after an engine failure on take-off and provide suitable crosswind capability for both take-off and landing. -

Touring Rudder Sit-On Top Kit Kit to Fit Rudder Enabled Sit-On Tops with a 10Mm Rudder Fixing Point
touring rudder sit-on top kit Kit to fit rudder enabled sit-on tops with a 10mm rudder fixing point. Note: It is easier to fit the Touring Rudder System if you have a screw hatch fitted to the rear stowage area of the kayak. If your kayak does not have this screw hatch and you wish to fit one, please contact a Perception dealer for advice. These instructions explain how to fit the rudder kit to a kayak with or without a rear screw hatch in place. Please make sure you follow the correct steps for your version of sit-on top kayak. This kit should contain the following: 1x rudder assembly with up-haul rope & split ring 4x deck fittings 4x length of rudder hose 5x self tapping screws 2x Dyneema control line - with cord end assembly 2x oval toggle 1x pair of Tip-Toes control footrests with foam washers 1x length of 4mm shock cord 6x footrest screws, washers and nuts - pre-fitted 1x rudder park - inc. hook, shock cord & fixing block You will also require some tools to fit this kit: Drill with 3mm, 5mm and 6mm drill bits Marker pen Short phillips screwdriver Wire cutters Small adjustable spanner or pair of pliers Lighter Tape measure Small amount of sticky tape Please read these instructions carefully before fitting! Step 1 - Control line entry points The rudder will need to have two control lines attached, each one running through hose sections inside the kayak from the rudder to the Tip-Toes footrests. This kit has four hose sections (two pairs) as two sections are needed per control line. -

Aerosport Modeling Rudder Trim
AEROSPORT MODELING RUDDER TRIM Segment: MOBILITY PARTS PROVIDERS | Engineering companies Application vertical: MOBILITY AND TRANSPORTATION | AircraFt Application type: FINAL PART: Short runs THE CUSTOMER FINAL PART: SHORT RUNS AEROSPORT MODELING RUDDER TRIM COMPANY DESCRIPTION APPLICATION TRADITIONAL MANUFACTURING Some planes are equipped with small tabs on the control surfaces (e.g., rudder trim Assembly of 26 different machined and standard parts Aerosport Modeling & Design was established in tabs, aileron tabs, elevator tabs) so the pilot can make minute adjustments to pitch, September 1996, and since then, they have worked to yaw, and roll to keep the airplane flying a true, clean line through the air. This produce the highest-possible quality prototypes, improves speed by reducing drag from the larger, constant movements of the full appearance models, working models, and machined rudder, aileron, and elevator. parts, and to meet or exceed client expectations. The company strives to be seen as a partner to their Many airplanes also have rudder and/or aileron trim systems. On some, the rudder clients and an extension of their design and trim tab is rigid but adjustable on the ground by bending: It is angled slightly to the development team, not just a supplier of prototyping left (when viewed from behind) to lessen the need for the pilot to push the rudder services. pedal constantly in order to overcome the left-turning tendencies of many prop- driven aircraft. Some aircraft have hinged rudder trim tabs that the pilot can adjust Aerosport Products spun off from sister company in flight. Aerosport Modeling & Design in 2009 to develop products for experimental aircraft, the first of which When a servo tab is employed, it is moved into the slipstream opposite of the was the RV-10 Carbon Fiber Instrument Panel. -

COURSE INFORMATION M1
AII/1 Standard Wheel Orders All wheel orders given should be repeated by the helmsman and the officer of the watch should ensure that they are carried out correctly and immediately. All wheel orders should be held until countermanded. The helmsman should report immediately if the vessel does not answer the wheel. When there is concern that the helmsman is inattentive s/he should be questioned: "What is your heading ?" And s/he should respond: "My heading is ... degrees." Order Meaning 1. Midships Rudder to be held in the fore and aft position. 2. Port / starboard five 5° of port / starboard rudder to be held. 3. Port / starboard ten 10°of port / starboard rudder to be held. 4. Port / starboard fifteen 15°of port / starboard rudder to be held. 5. Port / starboard twenty 20° of port / starboard rudder to be held. 6. Port / starboard twenty-five 25°of port / starboard rudder to be held. 7. Hard -a-port / starboard Rudder to be held fully over to port / starboard. 8. Nothing to port/starboard Avoid allowing the vessel’s head to go to port/starboard . 9.Meet her Check the swing of the vessel´s head in a turn. 10. Steady Reduce swing as rapidly as possible. 11. Ease to five / ten Reduce amount of rudder to 5°/10°/15°/20° and hold. / fifteen / twenty 12. Steady as she goes Steer a steady course on the compass headin g indicated at the time of the order. The helmsman is to repeat the order and call out the compass heading on receiving the order. -
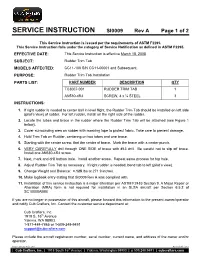
SERVICE INSTRUCTION SI0009 Rev a Page 1 of 2
SERVICE INSTRUCTION SI0009 Rev A Page 1 of 2 This Service Instruction is issued per the requirements of ASTM F2295. This Service Instruction falls under the category of Service Notification as defined in ASTM F2295. EFFECTIVE DATE: This Service Instruction is effective March 18, 2008 SUBJECT: Rudder Trim Tab MODELS AFFECTED: CC11-100 S/N CC11-00001 and Subsequent. PURPOSE: Rudder Trim Tab Installation PARTS LIST: PART NUMBER DESCRIPTION QTY TC3007-001 RUDDER TRIM TAB 1 AN530-4R4 SCREW, 4 x ¼ STEEL 3 INSTRUCTIONS: 1. If right rudder is needed to center ball in level flight, the Rudder Trim Tab should be installed on left side (pilot’s view) of rudder. For left rudder, install on the right side of the rudder. 2. Locate the tubes and brace in the rudder where the Rudder Trim Tab will be attached (see Figure 1 below). 3. Cover surrounding area on rudder with masking tape to protect fabric. Take care to prevent damage. 4. Hold Trim Tab on Rudder, centering on two tubes and one brace. 5. Starting with the center screw, find the center of brace. Mark the brace with a center punch. 6. VERY CAREFULLY drill through ONE SIDE of brace with #43 drill. Be careful not to slip off brace. Install one AN530-4R4 screw. 7. Next, mark and drill bottom hole. Install another screw. Repeat same process for top hole. 8. Adjust Rudder Trim Tab as necessary. If right rudder is needed, bend tab to left (pilot’s view). 9. Change Weight and Balance: +.125 lbs at 271.9 inches. -

Care and Feeding of Autopilots
BOATKEEPER Care and Feeding of Autopilots From Pacific Fishing, December 1998 By Terry Johnson, University of Alaska Sea Grant, Marine Advisory Program 4014 Lake Street, Suite 201B, Homer, AK 99603, (907) 235-5643, email: [email protected] ny device that simplifies matters for work on either a wet card or fluxgate com- cal, and the whole thing must be mounted Athe vessel operator must itself be com- pass, both of which respond to the earth’s where it is out of the weather and out of the plex; so it is with autopilots. magnetic field. Naturally, they also respond way but still has correct angle and rigidity In concept, the modern autopilot is to any other magnetic field in the boat, in- to impart full torque on the steering gear. If pretty simple. A compass indicates the cluding the engine block and electrical cir- the salesman doesn’t know exactly how to boat’s actual heading, a control unit accepts cuitry. Also, they are greatly affected by calculate sprocket size and other factors, get the heading the operator wants, a micropro- motion, including rolling, pitching, and an engineer to help you work it out. Big cessor calculates the difference between the pounding. To minimize motion the compass problems result from improper sizing. On desired and actual headings, and a power must be mounted low in the boat, prefer- hydraulic units, you need to know the ram unit acts on instructions from the control ably at the waterline and slightly forward size on your steering gear to select the cor- unit to move the rudder and turn the boat of amidships, close to the centerline. -
Introduction to Building: RUDDER ASSEMBLY MANUAL
RUDDER ASSEMBLY MANUAL This useful step-by-step manual has been prepared to help the first-time builder (with no previous building experience) to assemble the rudder tail kit for the Zenith aircraft, from a factory-supplied tail kit. The rudder tail section will require about 12 hours to assemble with just basic skills and tools, and will provide the builder with an excellent introduction to home- building an all-metal Zenith aircraft (in addition to completing the first assembly: the rudder). Building your own aircraft is probably going to be one of the most challenging and rewarding things you will do in your lifetime: imagine, you'll be flying in an aircraft that you have built yourself! Few people get the sensation and freedom of flying. Even fewer also get the reward of flying a plane that they've built themselves! Don't become overwhelmed when building the rudder kit. While it's true that an aircraft is a piece of complex machinery, it is also very straight forward, especially when building from a kit. It's normal that you may initially become overwhelmed and confused, but your initial fears and concerns will disappear as soon as the project starts coming together, and as you get a better understanding of the construction. Zenith aircraft are well-designed light aircraft - engineered specifically as a first-time kit project, using proven materials and simple processes and systems. This RUDDER ASSEMBLY MANUAL has been prepared as a supplement to the complete and detailed Drawings and Manuals for the ZENITH CH 650, STOL CH 701, and CH 750 series aircraft. -
AEX for Middle School Physical Science
Target Lesson 5 Lesson Reference: NASA at http://connect.larc.nasa.gov/connect_bak/pdf/flightd.pdf and a CAP ACE academic lesson Objectives: Students will define and demonstrate roll, pitch, and yaw. Students will experiment with surface controls to Students will convert fractions to decimals. Students will calculate percentages and determine probability from data. National Standards: Math Number and Operations o Work flexibly with fractions, decimals, and percents to solve problems Understand and apply basic concepts of probability o Use proportionality and a basic understanding of probability to make and Communication o Organize and consolidate mathematical thinking through communication Connections o Understand how mathematical ideas interconnect and build on one another to produce a coherent whole o Recognize and apply mathematics in contexts outside of mathematics Representation o Create and use representations to organize, record, and communicate mathematical ideas Science Unifying Concepts and Processes o Evidence, models, and explanation Content Standard A: Science as Inquiry Content Standard B: Physical Science o Motions and forces o Transfer of energy Content Standard E: Science and Technology o Abilities of technological design ISTE NETS Technology Standards Creativity and Innovation o Use models and simulations to explore complex systems and issues Communication and Collaboration o Develop an understanding of engineering design Critical Thinking, Problem Solving, and Decision Making 59 Background Information: (from NASA Quest at http://quest.arc.nasa.gov/aero/planetary/atmospheric/control.html) An airplane has three control surfaces: ailerons, elevators and a rudder. These control surfaces affect the motions of an airplane by changing the way the air flows around it. -

Civil Air Patrol's ACE Program
Civil Air Patrol’s ACE Program FPG-9 Glider Grade 5 Academic Lesson #4 Topics: flight, cause and effect, observation (science) Lesson Reference: Jack Reynolds Courtesy of the Academy of Model Aeronautics (AMA) at http://www.modelaircraft.org/education/fpg-9.aspx (It includes a video on building and flying the FPG-9.) The video explanation, may also be found at https://www.youtube.com/watch?v=pNtew_VzzWg. Length of Lesson: 40-50 minutes Objectives: • Students will build a glider. • Students will experiment with “launch” technique, elevons, and rudders to determine how to best fly the glider. National Science Standards: • Content Standard A: Science as Inquiry • Content Standard B: Physical Science - Position and motion of objects • Content Standard E: Science and Technology - Abilities of technological design • Unifying Concepts and Processes - Form and function Background Information: (by Jack Reynolds, AMA Volunteer) Play has been defined as the work of children and, as such, toys are the tools of their work. If play is the work of children, the “art of fine play,” (fun with a purpose) is the work of teachers. Orville and Wilbur Wright first learned about flight when their father brought home a toy helicopter for their amusement Orville recalled that they played with it for hours, eventually designing and modifying the original many times. The FPG-9 derives its name from its origins, the venerable and ubiquitous foam picnic plate. The Foam Plate Glider is created from a 9-inch diameter plate, available in most grocery and convenience stores. It can be used for an engaging and safe exploratory activity to excite students and deepen their understanding about science and the physics of flight. -

Stochastic High Fidelity Simulation and Scenarios for Testing of Fixed Wing Autonomous GNSS-Denied Navigation Algorithms
Stochastic High Fidelity Simulation and Scenarios for Testing of Fixed Wing Autonomous GNSS-Denied Navigation Algorithms Eduardo Gallo∗† February 2021 Abstract Autonomous unmanned aerial vehicle (UAV) inertial navigation exhibits an extreme dependency on the avail- ability of global navigation satellite systems (GNSS) signals, without which it incurs in a slow but unavoidable position drift that may ultimately lead to the loss of the platform if the GNSS signals are not restored or the aircraft does not reach a location from which it can be recovered by remote control. This article describes an stochastic high fidelity simulation of the flight of a fixed wing low SWaP (size, weight, and power) autonomous UAV in turbulent and varying weather intended to test and validate the GNSS-Denied performance of different navigation algorithms. Its open-source C++ implementation is available in [1]. Onboard sensors include accelerometers, gyroscopes, magnetometers, a Pitot tube, an air data system, a GNSS receiver, and a digital camera, so the simulation is valid for inertial, visual, and visual inertial navigation systems. Two scenarios involving the loss of GNSS signals are considered: the first represents the challenges involved in aborting the mission and heading towards a remote recovery location while experiencing varying weather, and the second models the continuation of the mission based on a series of closely spaced bearing changes. All simulation modules have been modeled with as few simplifications as possible to increase the realism of the results. While the implementation of the aircraft performances and its control system is deterministic, that of all other modules, including the mission, sensors, weather, wind, turbulence, and initial estimations, is fully stochastic. -

An Educational Rudder Sizing Algorithm for Utilization in Aircraft Design Software
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 13, Number 10 (2018) pp. 7889-7894 © Research India Publications. http://www.ripublication.com An Educational Rudder Sizing Algorithm for Utilization in Aircraft Design Software Omran Al-Shamma University of Information Technology and Communications, Baghdad, Iraq (Corresponding author) Rashid Ali Coventry University, Coventry, UK Haitham S. Hasan University of Information Technology and Communications, Baghdad, Iraq Abstract unfavorable center of gravity; (iv) landing gear retracted; (v) flaps in the approach position; and (vi) maximum landing The essential prerequisites of the rudder sizing process are the weight”. A similar regulation is founded in FAR part 23 [3] directional control and trim. The main roles of the rudder are: for general aviation and in MIL-STD [4] [5] for military turn coordinate, asymmetric thrust on conventional transport aircraft. aircraft, crosswind landing, adverse yaw, spin recovery, and glide slope adjustment. The asymmetric thrust and crosswind It should be noted that there are meddling between aileron and landing are the most crucial flight conditions that recognize rudder, and frequently employed concurrently. Therefore, the transport aircraft. This paper presents an educational directional and lateral dynamics are often coupled [6] [7]. rudder sizing algorithm of conventional aircraft, primarily, for Thus, it is a better rehearsal to size the aileron and rudder aeronautical engineering students and also for fresh engineers simultaneously. On the other hand, the aileron is a rate control to enhance their knowledge, understanding, and analysis. The device, while the rudder is similar to elevator as both are paper introduces the necessary equations to guide the designer displacement control device. -

Rudder Reversals Task
Federal Register / Vol. 76, No. 59 / Monday, March 28, 2011 / Notices 17183 Below we provide FAA’s projected ACTION: Notice of new task assignment In two additional events, commonly average estimates for the next three for the Aviation Rulemaking Advisory known as the Miami Flight 903 event years: 1 Committee (ARAC). and the Interflug event, pilot Current Actions: New collection of commanded pedal reversals caused information. SUMMARY: The FAA assigned ARAC a A300–600/A310 fins to experience loads Type of Review: New Collection. new task to consider whether changes to greater than their ultimate load level. Affected Public: Individuals and part 25 are necessary to address rudder Both airplanes survived because they Households, Businesses and pedal sensitivity and rudder reversals. possessed greater strength than required Organizations, State, Local or Tribal This notice is to inform the public of by the current standards. Government. this ARAC activity. In January 2008, an Airbus 319 Average Expected Annual Number of FOR FURTHER INFORMATION CONTACT: encountered a wake vortex. The pilot activities: 2. Robert C. Jones, Propulsion/Mechanical responded with several pedal reversals. Respondents: 2,813. Systems Branch, ANM–112, Transport Analysis shows that this caused a fin Annual responses: 2,813. Airplane Directorate, Federal Aviation load exceeding limit load by Frequency of Response: Once per Administration, 1601 Lind Avenue, approximately 29 percent. The pilot request. SW., Renton, Washington 98057, eventually stabilized the airplane and Average minutes per response: 15. telephone (425) 227–1234, facsimile safely landed. The Transportation Safety Burden hours: 704. (425) 227–1149; e-mail Board (TSB) Canada investigated this An agency may not conduct or [email protected].