An Educational Rudder Sizing Algorithm for Utilization in Aircraft Design Software
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Use of Rudder on Boeing Aircraft
12ADOBL02 December 2011 Use of rudder on Boeing aircraft According to Boeing the Primary uses for rudder input are in crosswind operations, directional control on takeoff or roll out and in the event of engine failure. This Briefing Leaflet was produced in co-operation with Boeing and supersedes the IFALPA document 03SAB001 and applies to all models of the following Boeing aircraft: 707, 717, 727, 737, 747, 757, 767, 777, 787, DC-8, DC-9, DC-10, MD-10, md-11, MD-80, MD-90 Sideslip Angle Fig 1: Rudder induced sideslip Background As part of the investigation of the American Airlines Flt 587 crash on Heading Long Island, USA the United States National Transportation Safety Board (NTSB) issued a safety recommendation letter which called Flight path for pilots to be made aware that the use of “sequential full opposite rudder inputs can potentially lead to structural loads that exceed those addressed by the requirements of certification”. Aircraft are designed and tested based on certain assumptions of how pilots will use the rudder. These assumptions drive the FAA/EASA, and other certifica- tion bodies, requirements. Consequently, this type of structural failure is rare (with only one event over more than 45 years). However, this information about the characteristics of Boeing aircraft performance in usual circumstances may prove useful. Rudder manoeuvring considerations At the outset it is a good idea to review and consider the rudder and it’s aerodynamic effects. Jet transport aircraft, especially those with wing mounted engines, have large and powerful rudders these are neces- sary to provide sufficient directional control of asymmetric thrust after an engine failure on take-off and provide suitable crosswind capability for both take-off and landing. -

Touring Rudder Sit-On Top Kit Kit to Fit Rudder Enabled Sit-On Tops with a 10Mm Rudder Fixing Point
touring rudder sit-on top kit Kit to fit rudder enabled sit-on tops with a 10mm rudder fixing point. Note: It is easier to fit the Touring Rudder System if you have a screw hatch fitted to the rear stowage area of the kayak. If your kayak does not have this screw hatch and you wish to fit one, please contact a Perception dealer for advice. These instructions explain how to fit the rudder kit to a kayak with or without a rear screw hatch in place. Please make sure you follow the correct steps for your version of sit-on top kayak. This kit should contain the following: 1x rudder assembly with up-haul rope & split ring 4x deck fittings 4x length of rudder hose 5x self tapping screws 2x Dyneema control line - with cord end assembly 2x oval toggle 1x pair of Tip-Toes control footrests with foam washers 1x length of 4mm shock cord 6x footrest screws, washers and nuts - pre-fitted 1x rudder park - inc. hook, shock cord & fixing block You will also require some tools to fit this kit: Drill with 3mm, 5mm and 6mm drill bits Marker pen Short phillips screwdriver Wire cutters Small adjustable spanner or pair of pliers Lighter Tape measure Small amount of sticky tape Please read these instructions carefully before fitting! Step 1 - Control line entry points The rudder will need to have two control lines attached, each one running through hose sections inside the kayak from the rudder to the Tip-Toes footrests. This kit has four hose sections (two pairs) as two sections are needed per control line. -

Aerosport Modeling Rudder Trim
AEROSPORT MODELING RUDDER TRIM Segment: MOBILITY PARTS PROVIDERS | Engineering companies Application vertical: MOBILITY AND TRANSPORTATION | AircraFt Application type: FINAL PART: Short runs THE CUSTOMER FINAL PART: SHORT RUNS AEROSPORT MODELING RUDDER TRIM COMPANY DESCRIPTION APPLICATION TRADITIONAL MANUFACTURING Some planes are equipped with small tabs on the control surfaces (e.g., rudder trim Assembly of 26 different machined and standard parts Aerosport Modeling & Design was established in tabs, aileron tabs, elevator tabs) so the pilot can make minute adjustments to pitch, September 1996, and since then, they have worked to yaw, and roll to keep the airplane flying a true, clean line through the air. This produce the highest-possible quality prototypes, improves speed by reducing drag from the larger, constant movements of the full appearance models, working models, and machined rudder, aileron, and elevator. parts, and to meet or exceed client expectations. The company strives to be seen as a partner to their Many airplanes also have rudder and/or aileron trim systems. On some, the rudder clients and an extension of their design and trim tab is rigid but adjustable on the ground by bending: It is angled slightly to the development team, not just a supplier of prototyping left (when viewed from behind) to lessen the need for the pilot to push the rudder services. pedal constantly in order to overcome the left-turning tendencies of many prop- driven aircraft. Some aircraft have hinged rudder trim tabs that the pilot can adjust Aerosport Products spun off from sister company in flight. Aerosport Modeling & Design in 2009 to develop products for experimental aircraft, the first of which When a servo tab is employed, it is moved into the slipstream opposite of the was the RV-10 Carbon Fiber Instrument Panel. -

Glider Accidents and Prevention
Glider Accidents – Statistics & Prevention Larry Suter / John Scott Northern California Soaring Association & Air Sailing Gliderport Glider Accident Summary Data from 2008 – 2013 172 accidents reported to NTSB SSF categorized into three Types 70% 60% 50% 40% Fatal 30% Non Fatal 20% 10% 0% Takeoff Free Flight Landing What fact is painfully obvious? Takeoff 70% 60% 50% 40% Fatal 30% Non Fatal 20% 10% 0% Takeoff Free Flight Landing Approximately 20% of all accidents occur during the takeoff phase Video of a canopy coming open on takeoff. According to the SSF opening canopies and deploying spoilers are more likely to cause a takeoff accident than a rope break or any other type PT3 event. (PT3 = Premature Termination of the Tow) Canopy and spoiler accidents are preventable! They occur because the pilot failed to properly complete their Pre-Takeoff checklist. Low altitude emergency training tends to focus on rope breaks. In reality rope breaks are a small fraction of Takeoff accidents. Deployed Spoilers There is no reason that deployed spoilers should cause an accident. Just close them! Rudder Waggle --- A potentially dangerous signal Two Landmark accidents; same scenario (2006 NV, 2011 MD) Pilots reacted too quickly w/o thinking and pulled release. (Panic? Misinterpretation?) Had insufficient altitude to return to airport. (120’, 200’) ASG Tow Pilot Manual discourages this signal below 1000’ AGL; Rudder deflections and AD coupling. Opening Canopy There is no reason that an opening canopy should cause an accident! Effects of an Opening -

09 Stability and Control
Aircraft Design Lecture 9: Stability and Control G. Dimitriadis Introduction to Aircraft Design Stability and Control H Aircraft stability deals with the ability to keep an aircraft in the air in the chosen flight attitude. H Aircraft control deals with the ability to change the flight direction and attitude of an aircraft. H Both these issues must be investigated during the preliminary design process. Introduction to Aircraft Design Design criteria? H Stability and control are not design criteria H In other words, civil aircraft are not designed specifically for stability and control H They are designed for performance. H Once a preliminary design that meets the performance criteria is created, then its stability is assessed and its control is designed. Introduction to Aircraft Design Flight Mechanics H Stability and control are collectively referred to as flight mechanics H The study of the mechanics and dynamics of flight is the means by which : – We can design an airplane to accomplish efficiently a specific task – We can make the task of the pilot easier by ensuring good handling qualities – We can avoid unwanted or unexpected phenomena that can be encountered in flight Introduction to Aircraft Design Aircraft description Flight Control Pilot System Airplane Response Task The pilot has direct control only of the Flight Control System. However, he can tailor his inputs to the FCS by observing the airplane’s response while always keeping an eye on the task at hand. Introduction to Aircraft Design Control Surfaces H Aircraft control -

COURSE INFORMATION M1
AII/1 Standard Wheel Orders All wheel orders given should be repeated by the helmsman and the officer of the watch should ensure that they are carried out correctly and immediately. All wheel orders should be held until countermanded. The helmsman should report immediately if the vessel does not answer the wheel. When there is concern that the helmsman is inattentive s/he should be questioned: "What is your heading ?" And s/he should respond: "My heading is ... degrees." Order Meaning 1. Midships Rudder to be held in the fore and aft position. 2. Port / starboard five 5° of port / starboard rudder to be held. 3. Port / starboard ten 10°of port / starboard rudder to be held. 4. Port / starboard fifteen 15°of port / starboard rudder to be held. 5. Port / starboard twenty 20° of port / starboard rudder to be held. 6. Port / starboard twenty-five 25°of port / starboard rudder to be held. 7. Hard -a-port / starboard Rudder to be held fully over to port / starboard. 8. Nothing to port/starboard Avoid allowing the vessel’s head to go to port/starboard . 9.Meet her Check the swing of the vessel´s head in a turn. 10. Steady Reduce swing as rapidly as possible. 11. Ease to five / ten Reduce amount of rudder to 5°/10°/15°/20° and hold. / fifteen / twenty 12. Steady as she goes Steer a steady course on the compass headin g indicated at the time of the order. The helmsman is to repeat the order and call out the compass heading on receiving the order. -

Effects of Controls (Secondary)
Student Study Guide A Certificate EFFECTS OF CONTROLS (SECONDARY) Aim: To learn about any secondary effects of flight control inputs. We have seen the primary effect of controls… now lets explore any secondary effects… that is… does anything else happen when we pitch, roll or yaw… does one movement have more than the single effect we have seen so far? Secondary Effects: A secondary effect of control can be defined as any effect about one of the 3 main axis of motion which occurs as a result of an initial control input. If we pitch the glider, will it roll or yaw? No… so there is no secondary effect of pitch. How about if we apply aileron and roll the glider… it banks, slips towards the lower wing then yaws towards that lower wing… so yes, there is a secondary effect of roll and it is yaw. And yawing…we apply some rudder…the glider yaws, skids sideways and rolls towards the direction of the yaw. Your instructor will set the glider up in a normal gliding attitude at 45kts and demonstrate these secondary effects so you can see them. To summarise then: Control Axis Primary Effect Secondary Effect Elevato Lateral Glider pitches nose up there is no roll or yaw r and down Aileron Longitudina glider rolls left the glider slips towards the lower wing, then yaws l / right towards the lower wing Rudder Vertical glider yaws left The glider skids then rolls towards the inner wing glider yaws right So What?! Applying elevator to pitch the nose up or down has no secondary effect to consider. -
SERVICE INSTRUCTION SI0009 Rev a Page 1 of 2
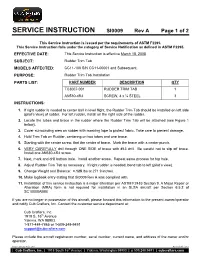
SERVICE INSTRUCTION SI0009 Rev A Page 1 of 2 This Service Instruction is issued per the requirements of ASTM F2295. This Service Instruction falls under the category of Service Notification as defined in ASTM F2295. EFFECTIVE DATE: This Service Instruction is effective March 18, 2008 SUBJECT: Rudder Trim Tab MODELS AFFECTED: CC11-100 S/N CC11-00001 and Subsequent. PURPOSE: Rudder Trim Tab Installation PARTS LIST: PART NUMBER DESCRIPTION QTY TC3007-001 RUDDER TRIM TAB 1 AN530-4R4 SCREW, 4 x ¼ STEEL 3 INSTRUCTIONS: 1. If right rudder is needed to center ball in level flight, the Rudder Trim Tab should be installed on left side (pilot’s view) of rudder. For left rudder, install on the right side of the rudder. 2. Locate the tubes and brace in the rudder where the Rudder Trim Tab will be attached (see Figure 1 below). 3. Cover surrounding area on rudder with masking tape to protect fabric. Take care to prevent damage. 4. Hold Trim Tab on Rudder, centering on two tubes and one brace. 5. Starting with the center screw, find the center of brace. Mark the brace with a center punch. 6. VERY CAREFULLY drill through ONE SIDE of brace with #43 drill. Be careful not to slip off brace. Install one AN530-4R4 screw. 7. Next, mark and drill bottom hole. Install another screw. Repeat same process for top hole. 8. Adjust Rudder Trim Tab as necessary. If right rudder is needed, bend tab to left (pilot’s view). 9. Change Weight and Balance: +.125 lbs at 271.9 inches. -

Yaw and Roll Moment Equations and Estimation
Roll and Yaw Moments and Stability Yaw Moment Equation The yaw moment is the moment about the zbody axis and is positive if it moves the nose of the plane to the right. The big contributor to the yaw moment is the vertical tail. We can write the yaw moment equation in a similar manner to the way we wrote the pitch-moment equation by considering the contributions from the wing-body combination and from the vertical tail. If we take moments about the center of gravity we have: (1) where is the vertical tail length, the distance from the cg to the aerodynamic center of the vertical tail, are the lift and drag of the vertical tail, and is the angle of attack of the vertical tail measured positive so as to create a positive side force. If we make the usual assumptions such as that is a small angle, and that , we can reduce Eq. (1) to the form: (2) and (3) where is the vertical tail area. Dividing by we obtain the yaw-moment equation in coefficient form: (4) If we let the vertical tail lift coefficient depend on a vertical tail lift curve slope and a rudder deflection we can write it as: (5) where and are the vertical tail lift curve slope and rudder “lift curve slope” respectively. In addition we can write the vertical tail angle of attack in terms of the vehicle side slip angle, , and the side-wash angle, , as: (6) If we make the substitutions, the yawing moment equation takes the form: (7) We can put this equation in a more useful form by determining the stability and control derivatives and . -

United States Patent (19) 11 Patent Number: 6,079,672 Lam Et Al
USOO6079672A United States Patent (19) 11 Patent Number: 6,079,672 Lam et al. (45) Date of Patent: Jun. 27, 2000 54 AILERON FOR FIXED WING AIRCRAFT 2,665,084 1/1954 Feeney et al. .......................... 244/217 2,791,385 5/1957 Johnson. 76 Inventors: Lawrence Y. Lam, 27013 Woodbrook 3,041,014 6/1962 Gerin. Rd., Rancho Palos Verdes, Calif. 90275; 2. 1: E. et al Michael . s y Hermoso, 4,049,2192Y- - -2 9/1977 Deana C etC al.a ............................. 244/217 OSAILOS 11 IIS, UallI. 4,180.222 12/1979 Thornburg. 4,717,097 1/1988 Sepstrup .................................. 244/217 21 Appl. No.: 08/993,241 4,720,062 1/1988 Warrink et al. ... 244/90 R 5,655,737 8/1997 Williams et al. ................... 244/217 X 22 Filed: Dec. 18, 1997 7 Primary Examiner Robert P. Swiatek 51) Int. Cl.' ........................................................ Bisc 9/00 Attorney, Agent, or Firm-Burns, Doane, Swecker & 52 U.S. Cl. .......................................... 244/217; 244/90 R Mathis, LLP 58 Field of Search ................................ 244/90 R, 90 A, 244/110 D, 217 57 ABSTRACT 56) References Cited An aircraft aileron System unique in its construction, method of deployment and the functional results obtained, is com U.S. PATENT DOCUMENTS prised of two panels located at the rear portion of the wing, in a Spanwise direction and aligned with the wing's trailing E. to: With edge. The panels are independently hinged at their leading 1875S03 0f1932 Hall edges and rotate to make angular deflections with respect to 1992.157 2/1935 Hall. the wing. -

Care and Feeding of Autopilots
BOATKEEPER Care and Feeding of Autopilots From Pacific Fishing, December 1998 By Terry Johnson, University of Alaska Sea Grant, Marine Advisory Program 4014 Lake Street, Suite 201B, Homer, AK 99603, (907) 235-5643, email: [email protected] ny device that simplifies matters for work on either a wet card or fluxgate com- cal, and the whole thing must be mounted Athe vessel operator must itself be com- pass, both of which respond to the earth’s where it is out of the weather and out of the plex; so it is with autopilots. magnetic field. Naturally, they also respond way but still has correct angle and rigidity In concept, the modern autopilot is to any other magnetic field in the boat, in- to impart full torque on the steering gear. If pretty simple. A compass indicates the cluding the engine block and electrical cir- the salesman doesn’t know exactly how to boat’s actual heading, a control unit accepts cuitry. Also, they are greatly affected by calculate sprocket size and other factors, get the heading the operator wants, a micropro- motion, including rolling, pitching, and an engineer to help you work it out. Big cessor calculates the difference between the pounding. To minimize motion the compass problems result from improper sizing. On desired and actual headings, and a power must be mounted low in the boat, prefer- hydraulic units, you need to know the ram unit acts on instructions from the control ably at the waterline and slightly forward size on your steering gear to select the cor- unit to move the rudder and turn the boat of amidships, close to the centerline. -
Introduction to Building: RUDDER ASSEMBLY MANUAL
RUDDER ASSEMBLY MANUAL This useful step-by-step manual has been prepared to help the first-time builder (with no previous building experience) to assemble the rudder tail kit for the Zenith aircraft, from a factory-supplied tail kit. The rudder tail section will require about 12 hours to assemble with just basic skills and tools, and will provide the builder with an excellent introduction to home- building an all-metal Zenith aircraft (in addition to completing the first assembly: the rudder). Building your own aircraft is probably going to be one of the most challenging and rewarding things you will do in your lifetime: imagine, you'll be flying in an aircraft that you have built yourself! Few people get the sensation and freedom of flying. Even fewer also get the reward of flying a plane that they've built themselves! Don't become overwhelmed when building the rudder kit. While it's true that an aircraft is a piece of complex machinery, it is also very straight forward, especially when building from a kit. It's normal that you may initially become overwhelmed and confused, but your initial fears and concerns will disappear as soon as the project starts coming together, and as you get a better understanding of the construction. Zenith aircraft are well-designed light aircraft - engineered specifically as a first-time kit project, using proven materials and simple processes and systems. This RUDDER ASSEMBLY MANUAL has been prepared as a supplement to the complete and detailed Drawings and Manuals for the ZENITH CH 650, STOL CH 701, and CH 750 series aircraft.