A Polarization Approach to Determining Rotational Angles of a Mortar
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

W5GI MYSTERY ANTENNA (Pdf)
W5GI Mystery Antenna A multi-band wire antenna that performs exceptionally well even though it confounds antenna modeling software Article by W5GI ( SK ) The design of the Mystery antenna was inspired by an article written by James E. Taylor, W2OZH, in which he described a low profile collinear coaxial array. This antenna covers 80 to 6 meters with low feed point impedance and will work with most radios, with or without an antenna tuner. It is approximately 100 feet long, can handle the legal limit, and is easy and inexpensive to build. It’s similar to a G5RV but a much better performer especially on 20 meters. The W5GI Mystery antenna, erected at various heights and configurations, is currently being used by thousands of amateurs throughout the world. Feedback from users indicates that the antenna has met or exceeded all performance criteria. The “mystery”! part of the antenna comes from the fact that it is difficult, if not impossible, to model and explain why the antenna works as well as it does. The antenna is especially well suited to hams who are unable to erect towers and rotating arrays. All that’s needed is two vertical supports (trees work well) about 130 feet apart to permit installation of wire antennas at about 25 feet above ground. The W5GI Multi-band Mystery Antenna is a fundamentally a collinear antenna comprising three half waves in-phase on 20 meters with a half-wave 20 meter line transformer. It may sound and look like a G5RV but it is a substantially different antenna on 20 meters. -
Smith Chart Calculations
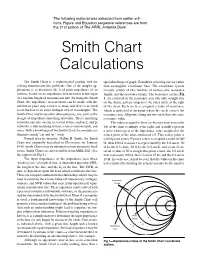
The following material was extracted from earlier edi- tions. Figure and Equation sequence references are from the 21st edition of The ARRL Antenna Book Smith Chart Calculations The Smith Chart is a sophisticated graphic tool for specialized type of graph. Consider it as having curved, rather solving transmission line problems. One of the simpler ap- than rectangular, coordinate lines. The coordinate system plications is to determine the feed-point impedance of an consists simply of two families of circles—the resistance antenna, based on an impedance measurement at the input family, and the reactance family. The resistance circles, Fig of a random length of transmission line. By using the Smith 1, are centered on the resistance axis (the only straight line Chart, the impedance measurement can be made with the on the chart), and are tangent to the outer circle at the right antenna in place atop a tower or mast, and there is no need of the chart. Each circle is assigned a value of resistance, to cut the line to an exact multiple of half wavelengths. The which is indicated at the point where the circle crosses the Smith Chart may be used for other purposes, too, such as the resistance axis. All points along any one circle have the same design of impedance-matching networks. These matching resistance value. networks can take on any of several forms, such as L and pi The values assigned to these circles vary from zero at the networks, a stub matching system, a series-section match, and left of the chart to infinity at the right, and actually represent more. -
The DBJ-1: a VHF-UHF Dual-Band J-Pole
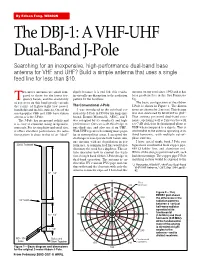
By Edison Fong, WB6IQN The DBJ-1: A VHF-UHF Dual-Band J-Pole Searching for an inexpensive, high-performance dual-band base antenna for VHF and UHF? Build a simple antenna that uses a single feed line for less than $10. wo-meter antennas are small com- dipole because it is end fed; this results antenna on my roof since 1992 and it has pared to those for the lower fre- in virtually no disruption to the radiation been problem-free in the San Francisco Tquency bands, and the availability pattern by the feed line. fog. of repeaters on this band greatly extends The basic configuration of the ribbon the range of lightweight low power The Conventional J-Pole J-Pole is shown in Figure 1. The dimen- handhelds and mobile stations. One of the I was introduced to the twinlead ver- sions are shown for 2 meters. This design most popular VHF and UHF base station sion of the J-Pole in 1990 by my long-time was also discussed by KD6GLF in QST.1 antennas is the J-Pole. friend, Dennis Monticelli, AE6C, and I That antenna presented dual-band reso- The J-Pole has no ground radials and was intrigued by its simplicity and high nance, operating well at 2 meters but with it is easy to construct using inexpensive performance. One can scale this design to a 6-7 dB deficit in the horizontal plane at materials. For its simplicity and small size, one-third size and also use it on UHF. UHF when compared to a dipole. -
Design and Fabrication of a Micro-Strip Antenna for Wi-Max Applications
MEE08:29 DESIGN AND FABRICATION OF A MICRO-STRIP ANTENNA FOR WI-MAX APPLICATIONS Tulha Moaiz Yazdani Munawar Islam This thesis is presented as part of Degree of Master of Science in Electrical Engineering Blekinge Institute of Technology October 2008 Blekinge Institute of Technology School of Engineering Department: Signal Processing Supervisor: Dr. Mats Pettersson Examiner: Dr. Mats Pettersson - ii - UAbstract Worldwide Interoperability for Microwave Access (Wi-Max) is a broadband technology enabling the delivery of last mile (final leg of delivering connectivity from a communication provider to customer) wireless broadband access (alternative to cable and DSL). It should be easy to deploy and cheaper to user compared to other technologies. Wi-Max could potentially erase the suburban and rural blackout areas with no broadband Internet access by using an antenna with high gain and reasonable bandwidth Microstrip patch antennas are very popular among Local Area Network (LAN), Metropolitan Area Network (MAN), Wide Area Network (WAN) technologies due to their advantages such as light weight, low volume, low cost, compatibility with integrated circuits and easy to install on rigid surface. The aim is to design and fabricate a Microstrip antenna operating at 3.5GHz to achieve maximum bandwidth for Wi-Max applications. The transmission line model is used for analysis. S-parameters (S11 and S21) are measured for the fabricated Microstrip antenna using network analyzer in a lab environment. The fabricated single patch antenna brings out greater bandwidth than conventional high frequency patch antenna. The developed antenna also is found to have reasonable gain. - iii - - iv - UAcknowledgement It is a great pleasure to express our deep and sincere gratitude to our supervisor Dr. -

Electronic Science Electrodynamics and Microwaves 17. Stub Matching
1 Module 17 Stub Matching Technique in Transmission Lines 1. Introduction 2. Concept of matching stub 3. Mathematical Basis for Single shunt stub matching 4 .Designing of single stub using Smith chart 5. Series single stub 6. Concept of Double stub matching 7. Mathematical Basis for Double Stub Matching 8. Design of Double stub using Smith Chart: 9. Summary Objectives After completing this module, you will be able to 1. Understand the concept of matching stub and different types of it. 2. Understand the mathematical principle behind the stub matching technique. 3. Design single stub and double stub using Smith chart. 4. Know about advantages and limitations of stub matching technique. Electrodynamics and Microwaves Electronic Science 17. Stub Matching Technique in Transmission Lines 2 1. Introduction In the earlier modules , we have discussed about how matching networks and QWT can be used for matching the load impedance with the lossless transmission line. Both these techniques suffer from some drawbacks .Especially the losses like, insertion loss, mismatch loss are of much more prominent losses. There is another technique known as “Stub Matching Technique” to match the load impedance with the Characteristic impedance of the given transmission line so as to have zero reflection coefficient. The technique is marvelous and the designing can be done using Smith chart in a very simple way. Let us discuss it with adequate details rather qualitatively avoiding mathematical rigor in it. 2. Concept of Matching Stub A section of a transmission line having small length is called as a stub. Two types’ namely single stub and double stub comprising of one or two stubs are in common use. -

ANTENNA THEORY Analysis and Design CONSTANTINE A
ANTENNA THEORY Analysis and Design CONSTANTINE A. BALANIS Arizona State University JOHN WILEY & SONS New York • Chichester • Brisbane • Toronto • Singapore Contents Preface xv Chapter 1 Antennas 1 1.1 Introduction 1 1.2 Types of Antennas 1 Wire Antennas; Aperture Antennas; Array Antennas; Reflector Antennas; Lens Antennas 1.3 Radiation Mechanism 7 1.4 Current Distribution on a Thin Wire Antenna 11 1.5 Historical Advancement 15 References 15 Chapter 2 Fundamental Parameters of Antennas 17 2.1 Introduction 17 2.2 Radiation Pattern 17 Isotropic, Directional, and Omnidirectional Patterns; Principal Patterns; Radiation Pattern Lobes; Field Regions; Radian and Steradian vii viii CONTENTS 2.3 Radiation Power Density 25 2.4 Radiation Intensity 27 2.5 Directivity 29 2.6 Numerical Techniques 37 2.7 Gain 42 2.8 Antenna Efficiency 44 2.9 Half-Power Beamwidth 46 2.10 Beam Efficiency 46 2.11 Bandwidth 47 2.12 Polarization 48 Linear, Circular, and Elliptical Polarizations; Polarization Loss Factor 2.13 Input Impedance 53 2.14 Antenna Radiation Efficiency 57 2.15 Antenna as an Aperture: Effective Aperture 59 2.16 Directivity and Maximum Effective Aperture 61 2.17 Friis Transmission Equation and Radar Range Equation 63 Friis Transmission Equation; Radar Range Equation 2.18 Antenna Temperature 67 References 70 Problems 71 Computer Program—Polar Plot 75 Computer Program—Linear Plot 78 Computer Program—Directivity 80 Chapter 3 Radiation Integrals and Auxiliary Potential Functions 82 3.1 Introduction 82 3.2 The Vector Potential A for an Electric Current Source -

Values Along a Transmission Line
Values Along a Transmission Line Notes on Calculating Input Values from Load Values Along a Transmission Line L. B. Cebik, W4RNL Note: This is a version of a presentation to college student-hams in 1994. Due to limitations in both the drawing system and the HTML system, substitute characters have been used in places. Greek letters are usually spelled out in the text (but not in equations). "L-script" is simply "l" in the text. In places, the standard footed slash that introduces a phase angle has been replaced by "@". Meanings should generally be clear for all other symbols and abbreviations used in the text. The input values of voltage, voltage phase angle, current, current phase angle, resistance, and reactance (along with impedance and impedance phase angle, if desired) depend upon two properties: the load value of these parameters and the length and characteristics of the transmission line. The load may be an antenna, a junction with one or more other transmission lines, a dummy load, or anything similar. Those with little experience in dealing with these concepts and quantities may be interested in reading the following review of the relationships among the various transmission line properties. Everything begins by speaking the same language. Figure 1 schematically represents most of the elements of transmission lines, while Table 1 (at the end of the text) defines many of the abbreviations to be used in the text and the equations to follow. Since all calculations will be done in terms of degrees (or radians) along a wavelength of RF, let us note in passing the standard conversion equations: file:///E|/Perso/archive/w4rnl/w4rnl/www.cebik.com/trans/zcalc.html (1 sur 11)30/04/2008 14:09:32 Values Along a Transmission Line and where Lm is the initial length in meters and Lf is the initial length in feet. -

2Ghz Microstrip Low Pass Filter Design with Open-Circuited Stub
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 13, Issue 2, Ver. II (Mar. - Apr. 2018), PP 01-09 www.iosrjournals.org 2GHz Microstrip Low Pass Filter Design with Open-Circuited Stub Akinwande Jubril and Dominic S Nyitamen Electrical/Electronic Engineering Department, Nigerian Defence Academy, Kaduna. email- Corresponding author: Akinwande Jubril Abstract: A 3 pole 2GHz Butterworth microstrip low pass filter is designed and fabricated based on the Open- circuited stub microstrip realization technique. The filter is designed using the FR4 substrate and the performance of the design is simulated using the ADS EM simulation tool. A comparison of the fabricated Open-circuited stub filter’s performance with the ADS simulation showed a marginal average deviation of less than 5%. At the cut-off frequency of 2GHz, the Open circuited stub filter produced an insertion loss of -3.009dB, while the stop-band characteristics exhibited an attenuation of -19.359dB at the stop-band frequency of 4GHz and a peak attenuation up to -35dB at 4.5GHz. ----------------------------------------------------------------------------------------------------------------------------- ---------- Date of Submission: 22-03-2018 Date of acceptance: 07-04-2018 ----------------------------------------------------------------------------------------------------------------------------- ---------- I. Introduction Microwave filters are required in all RF-communication techniques[1] and they are an integral part of a large variety of wireless communication systems, including cellular phones, satellite communications and radar [2]. They represent a class of electronic filters, designed to operate on signals in the megahertz and gigahertz frequency spectrum i.e. microwaves. Microwave filters have many applications including duplexers, diplexers, combiners, signal selectors etc. Low pass filters are used in communication systems to suppress spurious modes in oscillators and leakages in mixers[3]. -

Tightly Arranged Orthogonal Mode Antenna for 5G MIMO Mobile Terminal
SUN ET AL. | 1751 Received: 14 November 2017 1 | | INTRODUCTION DOI: 10.1002/mop.31240 With the rapid development of mobile communication, the Tightly arranged orthogonal demand for the capacity of wireless communication is strong. To satisfy the demand, multiple-input multiple-output mode antenna for 5G MIMO (MIMO) technology, as a key technology of fifth-generation (5G) communication, provides a promising solution for mobile terminal enhancing the communication channel capacity. And there are an increasing number of commercial mobile phones used Libin Sun1 | Haigang Feng2 | MIMO technology to improve the performance of mobile communication. Although MIMO technology can provide a Yue Li1 | Zhijun Zhang1 pleasing performance for mobile communication, how to integrate a lot of antennas in a limited region with good iso- 1 State Key Laboratory on Microwave and Communications, Tsinghua lation is a challenging task. It has been noted that the fre- National Laboratory for Information Science and Technology, Tsinghua quency spectrum 3.5 GHz has become one of the 5G bands University, Beijing 100084, China in the World Radio-communication Conference 2015.1 And 2 Graduate school at Shenzhen, Tsinghua University, Shenzhen 518055, very recently, the frequency spectrum 3.3–3.6 GHz has been China identified preliminarily for 5G mobile communication by 2 Correspondence China ministry of industry and information technology. Zhijun Zhange, State Key Laboratory on Microwave and Communications, Recently, a number of publications presented the mobile Tsinghua National Laboratory for Information Science and Technology, phone antenna for 5G MIMO application.3-9 The first 8 3 8 Tsinghua University, Beijing 100084, China. MIMO mobile phone antenna operating at 3.5 GHz is pro- Email: [email protected] posed in3 with 8 capacitive coupling elements; however, the Funding information mutual coupling across the required band of the MIMO National Natural Science Foundation of China, Grant/Award Number antenna is not presented in this paper. -
Impedance Matching and Smith Charts
Impedance Matching and Smith Charts John Staples, LBNL Impedance of a Coaxial Transmission Line A pulse generator with an internal impedance of R launches a pulse down an infinitely long coaxial transmission line. Even though the transmission line itself has no ohmic resistance, a definite current I is measured passing into the line by during the period of the pulse with voltage V. The impedance of the coaxial line Z0 is defined by Z0 = V / I. The impedance of a coaxial transmission line is determined by the ratio of the electric field E between the outer and inner conductor, and the induced magnetic induction H by the current in the conductors. 1 D D The surge impedance is, Z = 0 ln = 60ln 0 2 0 d d where D is the diameter of the outer conductor, and d is the diameter of the inner conductor. For 50 ohm air-dielectric, D/d = 2.3. Z = 0 = 377 ohms is the impedance of free space. 0 0 Velocity of Propagation in a Coaxial Transmission Line Typically, a coaxial cable will have a dielectric with relative dielectric constant er between the inner and outer conductor, where er = 1 for vacuum, and er = 2.29 for a typical polyethylene-insulated cable. The characteristic impedance of a coaxial cable with a dielectric is then 1 D Z = 60 ln 0 d r c and the propagation velocity of a wave is, v p = where c is the speed of light r In free space, the wavelength of a wave with frequency f is 1 c free−space coax = = r f r For a polyethylene-insulated coaxial cable, the propagation velocity is roughly 2/3 the speed of light. -

Dual-Function Heatsink Antennas for High-Density Three- Dimensional Integration of High-Power Transmitters
DUAL-FUNCTION HEATSINK ANTENNAS FOR HIGH-DENSITY THREE- DIMENSIONAL INTEGRATION OF HIGH-POWER TRANSMITTERS By LANCE NICHOLAS COVERT A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY UNIVERSITY OF FLORIDA 2008 1 © 2008 Lance Nicholas Covert 2 To my parents, my brother and my wife 3 ACKNOWLEDGMENTS I would like to thank my advisor Dr. Jenshan Lin for the opportunity to work under him and for his advice, encouragement, and mentoring throughout the process. I have truly enjoyed working for him over the years. I would also like to thank Dr. Huikai Xie, Dr. Henry Zmuda, and Dr. Fan Ren for their time and for being on my committee. All of the previous and current RFSOC group members up to date have helped in some way either technically or with comic relief and friendship, so I thank all of them. I would like to thank the Air Force Research Laboratory and Thomas Dalrymple for funding this project. The antenna measurements performed by Dan Janning at the AFRL are greatly appreciated. Mr. Bob Helsby of the Ansoft Corporation helped out by providing UF with Ansoft tools. I would also like to thank Shannon Chillingworth and all of the personnel in the EE office. Finally, I would like to thank my wife, my brother and my parents for their encouragement and unconditional support. Without them it would not be possible. I would also like to thank my wife’s family and my brother’s family for their support. -

Dual-Z0 Shortened Stubs
Dual-Z0 Shortened Stubs Cecil Moore, W5DXP, Rev. 1.2, 5-13-09 Introduction Shorted and open-circuit stubs, located along a transmission line, have long been a method of achieving a match or notch through the impedance transformations, the inductive reactance, or the capacitive reactance that stubs provide. Such stub techniques are discussed in The ARRL Handbook and The ARRL Antenna Book. (A detailed discussion of stub applications and stub matching techniques is beyond the scope of this article.) What is presented here is a method of shortening those matching stubs by as much as 66% by taking advantage of the phase shift between two pieces of transmission line with differing Z0s (characteristic impedances). The topic that seems to have been ignored in amateur radio publications is the physical length advantage to be gained by using dual-Z0 shortened stubs with two differring Z0 characteristic impedances. Since the pure reactance circle on a Smith Chart is associated with a phase angle and the normalized value of reactance is a tangent function of that phase angle, we can use the ARCTAN function to determine the phase shift in degrees at an impedance discontinuity in a stub. (This lossless phase shift at an impedance discontinuity point in a stub seems to be a free lunch granted to us mere mortals by the transmission line gods.) Assuming a reactance of 0-j300 ohms and normalizing to Z01 = 600 ohms and Z02 = 50 ohms: ARCTAN(300/600) = 26.6 deg = 0.0739 wavelength ARCTAN(300/50) = 80.5 deg = 0.2236 wavelength If the impedance is 0+j300 ohms at an impedance discontinuity between Z01 = 600 ohm line and Z02 = 50 ohm line, a steady-state phase shift of 80.5 - 26.6 = 53.9 deg will occur at that point when the impedance is purely reactive, i.e.