Toward New Horizons, a Multi-Volume Report Prepared for The
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Prepared by Textore, Inc. Peter Wood, David Yang, and Roger Cliff November 2020
AIR-TO-AIR MISSILES CAPABILITIES AND DEVELOPMENT IN CHINA Prepared by TextOre, Inc. Peter Wood, David Yang, and Roger Cliff November 2020 Printed in the United States of America by the China Aerospace Studies Institute ISBN 9798574996270 To request additional copies, please direct inquiries to Director, China Aerospace Studies Institute, Air University, 55 Lemay Plaza, Montgomery, AL 36112 All photos licensed under the Creative Commons Attribution-Share Alike 4.0 International license, or under the Fair Use Doctrine under Section 107 of the Copyright Act for nonprofit educational and noncommercial use. All other graphics created by or for China Aerospace Studies Institute Cover art is "J-10 fighter jet takes off for patrol mission," China Military Online 9 October 2018. http://eng.chinamil.com.cn/view/2018-10/09/content_9305984_3.htm E-mail: [email protected] Web: http://www.airuniversity.af.mil/CASI https://twitter.com/CASI_Research @CASI_Research https://www.facebook.com/CASI.Research.Org https://www.linkedin.com/company/11049011 Disclaimer The views expressed in this academic research paper are those of the authors and do not necessarily reflect the official policy or position of the U.S. Government or the Department of Defense. In accordance with Air Force Instruction 51-303, Intellectual Property, Patents, Patent Related Matters, Trademarks and Copyrights; this work is the property of the U.S. Government. Limited Print and Electronic Distribution Rights Reproduction and printing is subject to the Copyright Act of 1976 and applicable treaties of the United States. This document and trademark(s) contained herein are protected by law. This publication is provided for noncommercial use only. -
Navy Aegis Ballistic Missile Defense (BMD) Program: Background and Issues for Congress
Navy Aegis Ballistic Missile Defense (BMD) Program: Background and Issues for Congress Updated September 30, 2021 Congressional Research Service https://crsreports.congress.gov RL33745 SUMMARY RL33745 Navy Aegis Ballistic Missile Defense (BMD) September 30, 2021 Program: Background and Issues for Congress Ronald O'Rourke The Aegis ballistic missile defense (BMD) program, which is carried out by the Missile Defense Specialist in Naval Affairs Agency (MDA) and the Navy, gives Navy Aegis cruisers and destroyers a capability for conducting BMD operations. BMD-capable Aegis ships operate in European waters to defend Europe from potential ballistic missile attacks from countries such as Iran, and in in the Western Pacific and the Persian Gulf to provide regional defense against potential ballistic missile attacks from countries such as North Korea and Iran. MDA’s FY2022 budget submission states that “by the end of FY 2022 there will be 48 total BMDS [BMD system] capable ships requiring maintenance support.” The Aegis BMD program is funded mostly through MDA’s budget. The Navy’s budget provides additional funding for BMD-related efforts. MDA’s proposed FY2021 budget requested a total of $1,647.9 million (i.e., about $1.6 billion) in procurement and research and development funding for Aegis BMD efforts, including funding for two Aegis Ashore sites in Poland and Romania. MDA’s budget also includes operations and maintenance (O&M) and military construction (MilCon) funding for the Aegis BMD program. Issues for Congress regarding the Aegis BMD program include the following: whether to approve, reject, or modify MDA’s annual procurement and research and development funding requests for the program; the impact of the COVID-19 pandemic on the execution of Aegis BMD program efforts; what role, if any, the Aegis BMD program should play in defending the U.S. -

HPCR Manual on International Law Applicable to Air and Missile Warfare
Manual on International Law Applicable to Air and Missile Warfare Bern, 15 May 2009 Program on Humanitarian Policy and Conflict Research at Harvard University © 2009 The President and Fellows of Harvard College ISBN: 978-0-9826701-0-1 No part of this document may be reproduced, stored in a retrieval system, or transmitt ed in any form without the prior consent of the Program on Humanitarian Policy and Con- fl ict Research at Harvard University. This restriction shall not apply for non-commercial use. A product of extensive consultations, this document was adopted by consensus of an international group of experts on 15 May 2009 in Bern, Switzerland. This document does not necessarily refl ect the views of the Program on Humanitarian Policy and Confl ict Research or of Harvard University. Program on Humanitarian Policy and Confl ict Research Harvard University 1033 Massachusett s Avenue, 4th Floor Cambridge, MA 02138 United States of America Tel.: 617-384-7407 Fax: 617-384-5901 E-mail: [email protected] www.hpcrresearch.org | ii Foreword It is my pleasure and honor to present the HPCR Manual on International Law Applicable to Air and Missile Warfare. This Manual provides the most up-to-date restatement of exist- ing international law applicable to air and missile warfare, as elaborated by an international Group of Experts. As an authoritative restatement, the HPCR Manual contributes to the practical understanding of this important international legal framework. The HPCR Manual is the result of a six-year long endeavor led by the Program on Humanitarian Policy and Confl ict Research at Harvard University (HPCR), during which it convened an international Group of Experts to refl ect on existing rules of international law applicable to air and missile warfare. -

Air-Directed Surface-To-Air Missile Study Methodology
H. T. KAUDERER Air-Directed Surface-to-Air Missile Study Methodology H. Todd Kauderer During June 1995 through September 1998, APL conducted a series of Warfare Analysis Laboratory Exercises (WALEXs) in support of the Naval Air Systems Command. The goal of these exercises was to examine a concept then known as the Air-Directed Surface-to-Air Missile (ADSAM) System in support of Navy Overland Cruise Missile Defense. A team of analysts and engineers from APL and elsewhere was assembled to develop a high-fidelity, physics-based engineering modeling process suitable for understanding and assessing the performance of both individual systems and a “system of systems.” Results of the initial ADSAM Study effort served as the basis for a series of WALEXs involving senior Flag and General Officers and were subsequently presented to the (then) Under Secretary of Defense for Acquisition and Technology. (Keywords: ADSAM, Cruise missiles, Land Attack Cruise Missile Defense, Modeling and simulation, Overland Cruise Missile Defense.) INTRODUCTION In June 1995 the Naval Air Systems Command • Developing an analytical methodology that tied to- (NAVAIR) asked APL to examine the Air-Directed gether a series of previously distinct, “stovepiped” Surface-to-Air Missile (ADSAM) System concept for high-fidelity engineering models into an integrated their Overland Cruise Missile Defense (OCMD) doc- system that allowed the detailed analysis of a “system trine. NAVAIR was concerned that a number of impor- of systems” tant air defense–related decisions were being made -
Appearance of Apparent Antiship Missile Targets in Gobi Test Areas During 2013
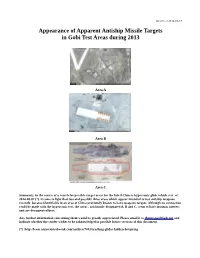
Version of 2014-09-15 Appearance of Apparent Antiship Missile Targets in Gobi Test Areas during 2013 Area A Area B Area C Summary: In the course of a search for possible target areas for the failed Chinese hypersonic glide vehicle test of 2014-08-07 (*), it came to light that two and possibly three areas which appear intended to test antiship weapons recently became identifiable in an area of China previously known to have weapons targets. Although no connection could be made with the hypersonic test, the areas , arbitrarily designated A, B and C, seem to have intrinsic interest and are documented here. Any further information concerning them would be greatly appreciated. Please email it to [email protected] and indicate whether the sender wishes to be acknowledged in possible future versions of this document. (*) http://lewis.armscontrolwonk.com/archive/7443/crashing-glider-hidden-hotspring Area A 40.466 N, 93.521 E Area A, 2013-11-04 The three shapes at lower left seem clearly meant to represent ships. The dark chevron around them may represent piers. The objects above them and to the right are unidentified, but might represent shore facilities. Warships in Su-ao Harbor, Taiwan The picture scale is almost the same as in the above image of Area A. Both the pair of actual ships at center and the presumed ship targets are about 170 meters long, closely matching the dimensions of Ticonderoga-class cruisers and Kee Lung-class (ex-Kidd) destroyers. Area A, 2013-08-01 Construction of the ship targets is almost complete. -

NSIAD-90-146 Missile Procurement Executive Summary
I “1 .” II ..._ -111”1”~1~ . .. - _-.. .- _ _.._.l:rril.tvl-_._._ ._ _.._ _. Slillt3_” _.I .,..- I..-- i;tkrrtkral“1”_.1_.-..-- _..------ Ac~orlnt -.-.----.-..---._._- ing Ol’l’iw.._._..- .-...... I “. ~_I ..-.---------- ---_._--.lll__ .-..” ..” *“I,L,“^I.“m”-““-. .11it\ l’tO0. MISSILE PROCUREMENT Further Production of RAAM Should Not Be Approved Until Questions Are Resolved National Security and International Affairs Division H-22 1734 May 4,199O The Honorable Denny Smith I louse of Representatives Dear Mr. Smith: This report addresses the status of the Advanced Medium Range Air-to-Air Missile (AMRAAM) at the scheduled full-rate production milestone. As requested, we focused on the missile’s demonstrated operational performance, the contractors’ readiness to produce quality missiles at the required rates, and the latest program cost estimates. The report concludes that significant questions about AMRAAM'S performance, reliability, producibility, and affordability remain unresolved. It recommends that the Secretary of Defense not approve any additional AMRAAM production until (1) tests demonstrate that the missile can meet all of its critical performance requirements and that its reliability meets the established requirements, (2) both contractors demonstrate that they can consistently produce quality missiles at the rates required by their contracts, (3) the Air Force and the Navy complete their review of missile quantity requirements, and (4) the Department of Defense determines that the AMRAAM program is affordable within realistic future budget projections and consults with the Congress to ensure that the program complies with the adjusted statutory cost cap. The report also suggests that the Congress deny the $1.34 billion requested for AMRAAM procurement in fiscal year 1991. -

Missilesmissilesdr Carlo Kopp in the Asia-Pacific
MISSILESMISSILESDr Carlo Kopp in the Asia-Pacific oday, offensive missiles are the primary armament of fighter aircraft, with missile types spanning a wide range of specialised niches in range, speed, guidance technique and intended target. With the Pacific Rim and Indian Ocean regions today the fastest growing area globally in buys of evolved third generation combat aircraft, it is inevitable that this will be reflected in the largest and most diverse inventory of weapons in service. At present the established inventories of weapons are in transition, with a wide variety of Tlegacy types in service, largely acquired during the latter Cold War era, and new technology 4th generation missiles are being widely acquired to supplement or replace existing weapons. The two largest players remain the United States and Russia, although indigenous Israeli, French, German, British and Chinese weapons are well established in specific niches. Air to air missiles, while demanding technologically, are nevertheless affordable to develop and fund from a single national defence budget, and they result in greater diversity than seen previously in larger weapons, or combat aircraft designs. Air-to-air missile types are recognised in three distinct categories: highly agile Within Visual Range (WVR) missiles; less agile but longer ranging Beyond Visual Range (BVR) missiles; and very long range BVR missiles. While the divisions between the latter two categories are less distinct compared against WVR missiles, the longer ranging weapons are often quite unique and usually much larger, to accommodate the required propellant mass. In technological terms, several important developments have been observed over the last decade. -

Up from Kitty Hawk Chronology
airforcemag.com Up From Kitty Hawk Chronology AIR FORCE Magazine's Aerospace Chronology Up From Kitty Hawk PART ONE PART TWO 1903-1979 1980-present 1 airforcemag.com Up From Kitty Hawk Chronology Up From Kitty Hawk 1903-1919 Wright brothers at Kill Devil Hill, N.C., 1903. Articles noted throughout the chronology provide additional historical information. They are hyperlinked to Air Force Magazine's online archive. 1903 March 23, 1903. First Wright brothers’ airplane patent, based on their 1902 glider, is filed in America. Aug. 8, 1903. The Langley gasoline engine model airplane is successfully launched from a catapult on a houseboat. Dec. 8, 1903. Second and last trial of the Langley airplane, piloted by Charles M. Manly, is wrecked in launching from a houseboat on the Potomac River in Washington, D.C. Dec. 17, 1903. At Kill Devil Hill near Kitty Hawk, N.C., Orville Wright flies for about 12 seconds over a distance of 120 feet, achieving the world’s first manned, powered, sustained, and controlled flight in a heavier-than-air machine. The Wright brothers made four flights that day. On the last, Wilbur Wright flew for 59 seconds over a distance of 852 feet. (Three days earlier, Wilbur Wright had attempted the first powered flight, managing to cover 105 feet in 3.5 seconds, but he could not sustain or control the flight and crashed.) Dawn at Kill Devil Jewel of the Air 1905 Jan. 18, 1905. The Wright brothers open negotiations with the US government to build an airplane for the Army, but nothing comes of this first meeting. -

Evolution of Smart Weapons
NIAS/CSS/ISSSP/U/ RR/069/2019 Srikumar Pullat Avinash Pushparaj EVOLUTION OF SMART WEAPONS NATIONAL INSTITUTE OF ADVANCED STUDIES Bengaluru, India EVOLUTION OF SMART WEAPONS Srikumar Pullat Avinash Pushparaj International Strategic and Security Studies Programme NATIONAL INSTITUTE OF ADVANCED STUDIES Bengaluru © National Institute of Advanced Studies 2019 Published by National Institute of Advanced Studies Indian Institute of Science Campus, Bengaluru - 560012 INDIA Tel: +91-80-2218 5000; Fax: +91-80-2218 5028 NIAS Report: NIAS/CSS/ISSSP/U/RR/069/2019 Typeset & Printed by Aditi Enterprises Bengaluru - 560 023 Ph.: 080-2310 7302 E-mail: [email protected] TABLE OF CONTENTS Acknowledgement iv Executive Summary 1 Evolution of bombs-Ancient, Medieval, 1850’s and beyond 2 Factors affecting Trajectory and Miss distance of a Bomb 3 Methods to improve Accuracy and decrease Miss distance 5 Methods to increase Stand-off Distance 7 Modern Day Glide Bombs 9 Issues involved Deployment of a Weapon system from an aircraft 11 Enabling Technologies 12 Technology Readiness Level (TRL) 13 Survey of Glide Bombs 14 Future of Smart Weapons 14 Appendix 1 Survey of glide bomb 16 Appendix 2 Survey of LGB and GBU’s (non-exhaustive list) 17 About the authors 18 iii ACKNOWLEDGEMENT Many thanks are due to members of International Strategic and Security Studies Programme, and Prof. Rajaram Nagappa in particular for his comments which helped in enhancing the quality of the report. The authors also thank Dr Amit Mukherjee and Dr Prakash Panneerselvam, Assistant Professors, ISSSP for their comments. The authors would also like to thank Dr Shailesh Nayak, Director, National Institute of Advanced Studies for his interest and constant encouragement. -

LESSON 2 the Signifi Cance of Stealth Aircraft
LESSON 2 The Signifi cance of Stealth Aircraft OR MUCH OF THE FIRST HUNDRED YEARS of Quick Write aviation, the US military varied in its enthusiasm F for unmanned fl ight. During both world wars, the US sought ways to deliver bombs without putting American crews at risk. Experiments with unmanned If you had been an American aircraft went on. But after both wars, interest waned. military planner in 1982, what lessons do you think This pattern continued through the 20th century. would you have drawn from It held even after episodes like the shooting down the Israeli experience with drones in the Bekaa Valley? of Francis Gary Powers’s U-2 over the Soviet Union in 1962. This had made some military planners feel manned surveillance fl ights were too risky. But the United States continued largely to ignore the potential for unmanned fl ight. Learn About The turning point came in 1982, however. Israel • the development of launched a volley of unmanned decoy aircraft in stealth aircraft Lebanon’s Bekaa Valley. The valley was protected by • the development of precision weapons Syrian air defenses. The Syrians fell for the trick. They • the development of fi red their surface-to-air missiles back at the Israelis. unmanned aerial vehicles This let the Israelis know just where each launch site (UAVs) was. The Israelis then moved decisively to destroy the Syrian air defenses. It was a stunning victory. It got American attention. US defense offi cials suddenly saw the potential of unmanned aircraft. 410 CHAPTER 6 The Modern Air Force LESSON 2 The Signifi cance of Stealth Aircraft The Development of Stealth Aircraft Vocabulary As you read in Chapter 5, Lesson 4, stealth technology— • low-observable also called low-observable technology—goes back to the technology early 1970s. -

Jb-2: America's First Cruise Missile
JB-2: AMERICA’S FIRST CRUISE MISSILE Gary Francis Quigg Submitted to the faculty of the University Graduate School in partial fulfillment of the requirements for the degree Master of Arts in the Department of History, Indiana University May 2014 Accepted by the Graduate Faculty, Indiana University, in partial fulfillment of the requirements for the degree of Master of Arts. Master’s Thesis Committee ______________________________ Philip V. Scarpino, Ph.D., Chair ______________________________ Kevin C. Cramer, Ph.D. ______________________________ Elizabeth Brand Monroe, Ph.D., J.D. ii ACKNOWLEDGEMENTS I am grateful to the staff of each of the following institutions for their patience and dedication: National Archives and Records Administration II (College Park, Maryland, facility), Library of Congress, National Air and Space Museum, National Museum of the United States Air Force, and the history offices at three United States Air Force bases, Eglin, Maxwell, and Wright-Patterson. Two professionals from among these repositories deserve special recognition: Margaret Clifton, Research Specialist at the Library of Congress, and Major General Clay T. McCutchan (USAF Ret.), Historian in the Office of History at Eglin AFB. I am indebted to the Public History Program, especially my thesis committee. First, to Dr. Kevin C. Kramer, who was particularly helpful in suggesting the following publications: Dawning of the Cold War: The United States Quest for Order by Randall B. Woods and Howard Jones, The Cold War: A New History by John Lewis Gaddis, Homeward Bound: American Families in the Cold War Era by Elaine Tyler May, The Culture of the Cold War by Stephen J. Whitfield, and Parting the Curtain: Propaganda, Culture and the Cold War, 1945-1961 by Walter L. -

WINTER 2008 - Volume 55, Number 4 WINTER 2008 - Volume 55, Number 4
WINTER 2008 - Volume 55, Number 4 WWW.AFHISTORICALFOUNDATION.ORG WINTER 2008 - Volume 55, Number 4 WWW.AFHISTORICALFOUNDATION.ORG From Satellite Tracking to Space Situational Awareness: Features The USAF and Space Surveillance 1957-2007 Rick W. Sturdevant 4 Precision Aerial Bombardment of Strategic Targets: Its Rise, Fall, and Resurrection Daniel L. Haulman 24 Operation Just Cause: An Air Power Perspective Stetson M. Siler 34 The P–51 Mustang: The Most Important Aircraft in History? Marshall L. Michel 46 Book Reviews The Day of Battle: The War in Sicily and Italy, 1943-1944 By Rick Atkinson Reviewed by Curtis H. O’Sullivan 58 The Day of Battle: The War in Sicily and Italy, 1943-1944 By Rick Atkinson Reviewed by Grant T. Weller 58 Gunning for the Red Baron By Leon Bennett Reviewed by Carl A. Christie 58 Clash of Eagles: USAAF 8th Air Force Bombers versus the Luftwafffe in World War II By Martin W. Bowman Reviewed by Anthony E. Wessel 59 Red Moon Rising: Sputnik and the Hidden Rivalries that Ignited the Space Race By Matthew Brzezinski Reviewed by J. Ron Davis 59 Danger Close: Tactical Air Controllers in Afghanistan and Iraq By Steve Call Reviewed by David J. Schepp 60 A Tale of Two Quagmires: Iraq, Vietnam, and the Hard Lessons of War By Kenneth J. Campbell Reviewed by John L. Cirafici 60 Risk and Exploration: Earth, Sea, and the Stars By Steven J. Dick & Keith L. Cowing, Eds. Reviewed by Steven Pomeroy 61 Under the Guns of the Red Baron: Von Richtofen’s Victories and Victims Fully Illustrated By Norman Franks, et al.