Short Takeoff Performance Using Circulation Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aircraft Classifications, History and Airport Technology Problem 2
CEE 4674: Airport Planning and Design Spring 2007 Assignment 1: Aircraft Classifications, History and Airport Technology Date Due: Jan/23/2008 Instructor: Trani Problem 2 Read pages 1 and 2 in Chapter 1 in the FAA Advisory Circular 150/5300-13 (Airport Design) before answering this question. Also, read the aircraft classification handout provided in class. Examine the FAA Advisory Circular 150/5300-13 (Airport Design). Specifically examine Appendix 13 of the FAA Advisory Circular which contains information about various aircraft. a) For the aircraft shown in Table 2.1, state the Airplane Design Group (ADG) class, the Terminal Areas Procedures Aircraft Speed Category, and the wake vortex class for each vehicle. b) For each aircraft, calculate the stalling speed (minimum speed for flight) from the known aircraft approach speeds published in the FAA AC. Stalling speed is just 30% below the approach speed. Table 2.1 Aircraft to be Studied. Aircraft ADG and Speed Classification British Aerospace BAe 146-300 C-III Beech Raytheon Bonanza B36TC A-I Airbus A-320-100 C-III Gulfstream G-IV D-II Boeing 777-300 D-V Boeing 747-400 D-V Boeing 737-500 C-III Beech Airliner 1900-C B-II British Aerospace BAe Jetstream 31 B-II Dassault Falcon FAL-900 B-II Cessna Citation I B-II Bombardier DHC-8 Dash 8-300 B-III Hawker HS 125 Series 700 C-I Bombardier CRJ/200 or Canadair CL-600 B-II Cessna 150 A-I McDonnell Douglas MDC-DC-9-82 C-III CEE 4674 A1 Trani Page 1 of 3 c) Match the names with the 2-D drawings (use the number of the aircraft and match by writing on the space to the right of each aircraft). -
KFP067 22Gb.Pdf
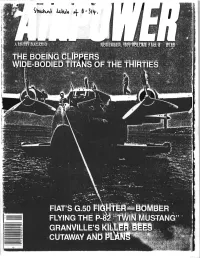
, , , " beginning as "The Boe ing Clipper". the opment of Model 294, the Air Corps "Pro word was not a Boeing model name like ject X" that was to become the XB-15, "Flying Fortress" (Model 299) or "Strat the Model 299 that was the ill-fated proto oliner" (Model 307). The word "Clipper", type of the B-17, and was cu rrently con made famous by the famous line of fast, tinuing XB-15 work and redesigning the square-rigged sailing ships developed by B-17 for production when the Pan Am re Donald McKay in the late 1840s, was ac quest was received on February 28, 1936. tually owned by Pan Ameri ca n. After ap With so much already in the works, it wa s The Boeing 314 Clipper was a marvelous machine plying it as part of the names on individ felt that the company couldn't divert the even by today's standards. She was big, comfort· ual airplanes, as "China Clipper", "Clip engineering manpower needed for still a able and very dependable. At 84,000 Ibs. gross per America", etc., the airline got a copy nother big project. weight, with 10 degrees of flap and no wind, she right on the word and subsequently be The deadline for response had passed used 3,200 ft. to take off, leaving the water in 47 came very possessive over its use. I t is re when Wellwood E. Beall, an engineer di seconds. At 70,000 Ibs. with 20 degrees of flap ported to have had injuncions issued verted to sa les and service work , returned and a30 knot headwind, she was off in just 240 h., against Packard for use of the work " Clip from a trip to Ch ina to deliver 10 Boeing leaving the water in only eight seconds. -

Aircraft Requirements for Sustainable Regional Aviation
aerospace Article Aircraft Requirements for Sustainable Regional Aviation Dominik Eisenhut 1,*,† , Nicolas Moebs 1,† , Evert Windels 2, Dominique Bergmann 1, Ingmar Geiß 1, Ricardo Reis 3 and Andreas Strohmayer 1 1 Institute of Aircraft Design, University of Stuttgart, 70569 Stuttgart, Germany; [email protected] (N.M.); [email protected] (D.B.); [email protected] (I.G.); [email protected] (A.S.) 2 Aircraft Development and Systems Engineering (ADSE) BV, 2132 LR Hoofddorp, The Netherlands; [email protected] 3 Embraer Research and Technology Europe—Airholding S.A., 2615–315 Alverca do Ribatejo, Portugal; [email protected] * Correspondence: [email protected] † These authors contributed equally to this work. Abstract: Recently, the new Green Deal policy initiative was presented by the European Union. The EU aims to achieve a sustainable future and be the first climate-neutral continent by 2050. It targets all of the continent’s industries, meaning aviation must contribute to these changes as well. By employing a systems engineering approach, this high-level task can be split into different levels to get from the vision to the relevant system or product itself. Part of this iterative process involves the aircraft requirements, which make the goals more achievable on the system level and allow validation of whether the designed systems fulfill these requirements. Within this work, the top-level aircraft requirements (TLARs) for a hybrid-electric regional aircraft for up to 50 passengers are presented. Apart from performance requirements, other requirements, like environmental ones, Citation: Eisenhut, D.; Moebs, N.; are also included. -

Cpnews May 2015.Pmd
CLIPPERCLIPPER PIONEERS,PIONEERS, INC.INC. FFORMERORMER PPANAN AAMM CCOCKPITOCKPIT CCREWREW PRESIDENT VICE-PRESIDENT & SECRETARY TREASURER / EDITOR HARVEY BENEFIELD STU ARCHER JERRY HOLMES 1261 ALGARDI AVE 7340 SW 132 ST 192 FOURSOME DRIVE CORAL GABLES, FL 33146-1107 MIAMI, FL 33156-6804 SEQUIM, WA 98382 (305) 665-6384 (305) 238-0911 (360) 681-0567 May 2015 - Clipper Pioneers Newsletter Vol 50-5 Page 1 The end of an Icon: A Boeing B-314 Flying Boat Pan American NC18601 - the Honolulu Clipper by Robert A. Bogash (www.rbogash.com/B314.html) In the world of man-made objects, be they antique cars, historic locomotives, steamships, religious symbols, or, in this case - beautiful airplanes, certain creations stand out. Whether due to perceived beauty, historical importance, or imagined romance, these products of man’s mind and hands have achieved a status above and beyond their peers. For me, the Lockheed Super Constellation is one such object. So is the Boeing 314 Flying Boat the Clipper, (when flown by Pan American Airways) - an Icon in the purest sense of the word. The B-314 was the largest, most luxurious, longest ranged commercial flying boat - built for, and operated by Pan Am. It literally spanned the world, crossing oceans and continents in a style still impressive today. From the late 1930’s through the Second World War, these sky giants set standard unequalled to this day. Arriving from San Francisco at her namesake city, the Honolulu Clipper disembarks her happy travelers at the Pearl City terminal. The 2400 mile trip generally took between 16 and 20 hours depending upon winds. -

Aviation Investigation Report A04w0114 Upset on Water
Transportation Safety Board Bureau de la sécurité des transports of Canada du Canada AVIATION INVESTIGATION REPORT A04W0114 UPSET ON WATER LANDING BIG RIVER AIR LTD. CESSNA A185F SEAPLANE C-GVYE TALTSON RIVER (FERGUSON’S CABIN) NORTHWEST TERRITORIES 07 JUNE 2004 The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. Aviation Investigation Report Upset on Water Landing Big River Air Ltd. Cessna A185F Seaplane C-GVYE Taltson River (Ferguson’s Cabin) Northwest Territories 07 June 2004 Report Number A04W0114 Summary The Cessna A185F seaplane (registration C-GVYE, serial number 18503778) operated by Big River Air Ltd., departed Four Mile Lake, Alberta, on a visual flight rules flight to the Taltson River, Northwest Territories. The purpose of the flight was to transport three passengers to a site on the river known as Ferguson’s Cabin. At approximately 1700 mountain daylight time, as the aircraft was landing on the water near Ferguson’s Cabin, the left float dug in and the left wing struck the water. The aircraft immediately cartwheeled and came to rest floating inverted in the river, with only the bottoms of the floats visible at the surface. The pilot and the front seat passenger sustained serious injuries; however, they managed to exit the submerged and damaged aircraft through a broken window in the left cabin door. Four fishermen in boats responded to the accident, removed the survivors from the cold water, and transported them to a warm shelter. -

A Conceptual Design of a Short Takeoff and Landing Regional Jet Airliner
A Conceptual Design of a Short Takeoff and Landing Regional Jet Airliner Andrew S. Hahn 1 NASA Langley Research Center, Hampton, VA, 23681 Most jet airliner conceptual designs adhere to conventional takeoff and landing performance. Given this predominance, takeoff and landing performance has not been critical, since it has not been an active constraint in the design. Given that the demand for air travel is projected to increase dramatically, there is interest in operational concepts, such as Metroplex operations that seek to unload the major hub airports by using underutilized surrounding regional airports, as well as using underutilized runways at the major hub airports. Both of these operations require shorter takeoff and landing performance than is currently available for airliners of approximately 100-passenger capacity. This study examines the issues of modeling performance in this now critical flight regime as well as the impact of progressively reducing takeoff and landing field length requirements on the aircraft’s characteristics. Nomenclature CTOL = conventional takeoff and landing FAA = Federal Aviation Administration FAR = Federal Aviation Regulation RJ = regional jet STOL = short takeoff and landing UCD = three-dimensional Weissinger lifting line aerodynamics program I. Introduction EMAND for air travel over the next fifty to D seventy-five years has been projected to be as high as three times that of today. Given that the major airport hubs are already congested, and that the ability to increase capacity at these airports by building more full- size runways is limited, unconventional solutions are being considered to accommodate the projected increased demand. Two possible solutions being considered are: Metroplex operations, and using existing underutilized runways at the major hub airports. -

F. Robert Van Der Linden CV
Curriculum Vitae F. Robert van der Linden Aeronautics Department National Air and Space Museum Smithsonian Institution Washington, D.C. 20013-7012 [email protected] 202-633-2647 (Office) Education Ph.D. (Modern American, Business and Military History) The George Washington University. 1997. M.A. (American and Russian History) The George Washington University. 1981. B.A. (History) University of Denver, 1977. Member Phi Beta Kappa Present Position Curator of Air Transportation and Special Purpose Aircraft, Aeronautics Division, National Air and Space Museum (NASM), Smithsonian Institution, Washington, D.C. Primary Responsibilities Research and Writing Currently at work on "The Struggle for the Long-Range Heavy Bomber: The United States Army air Corps, 1934-1939. This book examines the fight between the Army Air Corps, the Army, and the Navy over the introduction of a new generation of long-range heavy bombers during the interwar period. Questions of cost, of departmental responsibility, and of the relationship between business and industry, all play key roles in the search for this elusive aircraft and ultimately which military branch controls the air. Underlying all of these issues is the question of whether or not the United States needs a separate, independent air force. Also researching a book on the creation of Transcontinental & Western Air (TWA). This business history will trace the story of this important airline from its creation in 1930 from the ambitious but unprofitable Transcontinental Air Transport, formed by Clement Keys with technical assistance from Charles Lindbergh, and parts for the successful Western Air Express of Harris Hanshue through World War II and its reorganization as Trans World Airlines under Howard Hughes. -

Pan Am's Historic Contributions to Aircraft Cabin Design
German Aerospace Society, Hamburg Branch Hamburg Aerospace Lecture Series Dieter Scholz Pan Am's Historic Contributions to Aircraft Cabin Design Based on a Lecture Given by Matthias C. Hühne on 2017-05-18 at Hamburg University of Applied Sciences 2017-11-30 2 Abstract The report summarizes groundbreaking aircraft cabin developments at Pan American World Airways (Pan Am). The founder and chief executive Juan Terry Trippe (1899-1981) estab- lished Pan Am as the world's first truly global airline. With Trippe's determination, foresight, and strategic brilliance the company accomplished many pioneering firsts – many also in air- craft cabin design. In 1933 Pan Am approached the industrial designer Norman Bel Geddes (1893-1958). The idea was to create the interior design of the Martin M-130 flying boat by a specialized design firm. Noise absorption was optimized. Fresh air was brought to an agreea- ble temperature before it was pumped into the aircraft. Adjustable curtains at the windows made it possible to regulate the amount of light in the compartments. A compact galley was designed. The cabin layout optimized seating comfort and facilitated conversion to the night setting. The pre-war interior design of the Boeing 314 flying boat featured modern contours and colors. Meals were still prepared before flight and kept warm in the plane's galley. The innovative post-war land based Boeing 377 Stratocruiser had a pressurized cabin. The cabin was not divided anymore into compartments. Seats were reclining. The galley was well equipped. The jet age started at Pan Am with the DC-8 and the B707. -

Aircraft: Boeing 727, 737, 747, 757; Douglas DC-8, DC-9
No.: 2009-20080703001 Date: September 4, 2009 http://www.faa.gov/aircraft/safety/programs/sups/upn AFFECTED PRODUCTS: Aircraft: Boeing 727, 737, 747, 757; Douglas DC-8, DC-9 and MD-11 aircraft Part Number: Half Hinge Assembly, P/N 3953095U504 Notes: Additional parts may be affected (see parts list below). PURPOSE: The notification advises all aircraft owners, operators, manufacturers, maintenance organizations, parts suppliers and distributors regarding the unapproved parts produced by Watson’s Profiling Corporation, located in Ontario, CA 91761. BACKGROUND: Information received during a Federal Aviation Administration (FAA) Suspected Unapproved Parts (SUP) investigation revealed that between August 2005 and November 2007, Watson’s Profiling Corp., 1460 Balboa Avenue, Ontario, CA 91761, produced and sold parts (SEE ATTACHED PARTS LIST) without Direct Ship or Drop Ship authority from The Boeing Company. Furthermore, Watson’s Profiling Corp. is not an FAA Production Approval Holder. The parts produced by Watson’s Profiling Corporation have the following characteristics. • Their accompanying documentation indicates that the parts were manufactured by Watson’s, Profiling; however, they did not have FAA approval to manufacture and sell the parts as FAA-approved replacement parts. In addition, the investigation determined that some parts passed through various distributors. The majority, which were sold by Fossco Inc., 1211 Rainbow Avenue, Suite A, Pensacola, FL 32505. Documentation with the parts incorrectly indicated Watson’s Profiling, had -

Aircraft of Today. Aerospace Education I
DOCUMENT RESUME ED 068 287 SE 014 551 AUTHOR Sayler, D. S. TITLE Aircraft of Today. Aerospace EducationI. INSTITUTION Air Univ.,, Maxwell AFB, Ala. JuniorReserve Office Training Corps. SPONS AGENCY Department of Defense, Washington, D.C. PUB DATE 71 NOTE 179p. EDRS PRICE MF-$0.65 HC-$6.58 DESCRIPTORS *Aerospace Education; *Aerospace Technology; Instruction; National Defense; *PhysicalSciences; *Resource Materials; Supplementary Textbooks; *Textbooks ABSTRACT This textbook gives a brief idea aboutthe modern aircraft used in defense and forcommercial purposes. Aerospace technology in its present form has developedalong certain basic principles of aerodynamic forces. Differentparts in an airplane have different functions to balance theaircraft in air, provide a thrust, and control the general mechanisms.Profusely illustrated descriptions provide a picture of whatkinds of aircraft are used for cargo, passenger travel, bombing, and supersonicflights. Propulsion principles and descriptions of differentkinds of engines are quite helpful. At the end of each chapter,new terminology is listed. The book is not available on the market andis to be used only in the Air Force ROTC program. (PS) SC AEROSPACE EDUCATION I U S DEPARTMENT OF HEALTH. EDUCATION & WELFARE OFFICE OF EDUCATION THIS DOCUMENT HAS BEEN REPRO OUCH) EXACTLY AS RECEIVED FROM THE PERSON OR ORGANIZATION ORIG INATING IT POINTS OF VIEW OR OPIN 'IONS STATED 00 NOT NECESSARILY REPRESENT OFFICIAL OFFICE OF EOU CATION POSITION OR POLICY AIR FORCE JUNIOR ROTC MR,UNIVERS17/14AXWELL MR FORCEBASE, ALABAMA Aerospace Education I Aircraft of Today D. S. Sayler Academic Publications Division 3825th Support Group (Academic) AIR FORCE JUNIOR ROTC AIR UNIVERSITY MAXWELL AIR FORCE BASE, ALABAMA 2 1971 Thispublication has been reviewed and approvedby competent personnel of the preparing command in accordance with current directiveson doctrine, policy, essentiality, propriety, and quality. -

Toronto City Centre Airport – Chronology and Planning Issues Summary
1 Toronto City Centre Airport – Chronology and Planning Issues Summary Explanatory Notes: The following is a chronology of events, decisions, issues and policies related to the history of the Toronto island airport, summarized by City Planning staff. The number in brackets following each item is a cross-reference to the Bibliography. 1928 The City Board of Control asked the Harbour Board to report "on developing the West Island Sand Bar for a seaplane, flying boat, and amphibian airplane base". (8) 1937 The Harbour Commissioner agreed that “two airports should be built: a major one on the Island site and an auxiliary one at Malton”. (8) 1939 Toronto City Centre Airport opened as the Port George VI Airport. (26) 1953 A traffic control system was installed at the airport to accommodate the increase of business training flights. This was updated in 1960 when a radio control system was installed. (8) 1957 The City transferred the ownership of Malton Airport to the Federal Government, which assumed the responsibility for it in exchange for providing improvements to the Island Airport, including a new 4,000-foot (1,220 metre) runway, the installation of navigation and landing systems, and lights to assist night flying. An airport ferry to the island was also put into service. (34) 1961 The improvements referenced above were implemented. They involved extending the site by adding landfill on the east and west extremities of the island, constructing the 4,000-foot (1,220 metre) runway, and a system of paved taxiways. A new twin-bay hangar was built at the same time, and the lighting to assist night flying was added. -
Department of Defense Program Acquisition Cost by Weapons System
The estimated cost of this report or study for the Department of Defense is approximately $36,000 for the 2019 Fiscal Year. This includes $11,000 in expenses and $25,000 in DoD labor. Generated on 2019FEB14 RefID: B-1240A2B FY 2020 Program Acquisition Costs by Weapon System Major Weapon Systems Overview The performance of United States (U.S.) weapon systems are unmatched, ensuring that U.S. military forces have a tactical combat advantage over any adversary in any environmental situation. The Fiscal Year (FY) 2020 acquisition (Procurement and Research, Development, Test, and Evaluation (RDT&E)) funding requested by the Department of Defense (DoD) totals $247.3 billion, which includes funding in the Base budget and the Overseas Contingency Operations (OCO) fund, totaling $143.1 billion for Procurement and $104.3 billion for RDT&E. The funding in the budget request represents a balanced portfolio approach to implement the military force objective established by the National Defense Strategy. Of the $247.3 billion in the request, $83.9 billion finances Major Defense Acquisition Programs (MDAPs), which are acquisition programs that exceed a cost threshold established by the Under Secretary of Defense for Acquisition and Sustainment. To simplify the display of the various weapon systems, this book is organized by the following mission area categories: • Aircraft and Related Systems • Missiles and Munitions • Command, Control, Communications, • Shipbuilding and Maritime Systems Computers, and Intelligence (C4I) • Space Based Systems Systems • Science and Technology • Ground Systems • Mission Support Activities • Missile Defeat and Defense Programs FY 2020 Investment Total: $247.3 Billion $ in Billions Numbers may not add due to rounding Introduction FY 2020 Program Acquisition Costs by Weapon System The Distribution of Funding in FY 2020 for Procurement and RDT&E by Component and Category* $ in Billions $ in Billions * Funding in Mission Support activities are not represented in the above displays.