Inverse Trigonometric Functions 2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

3 Elementary Functions
3 Elementary Functions We already know a great deal about polynomials and rational functions: these are analytic on their entire domains. We have thought a little about the square-root function and seen some difficulties. The remaining elementary functions are the exponential, logarithmic and trigonometric functions. 3.1 The Exponential and Logarithmic Functions (§30–32, 34) We have already defined the exponential function exp : C ! C : z 7! ez using Euler’s formula ez := ex cos y + iex sin y (∗) and seen that its real and imaginary parts satisfy the Cauchy–Riemann equations on C, whence exp C d z = z is entire (analytic on ). Indeed recall that dz e e . We have also seen several of the basic properties of the exponential function, we state these and several others for reference. Lemma 3.1. Throughout let z, w 2 C. 1. ez 6= 0. ez 2. ez+w = ezew and ez−w = ew 3. For all n 2 Z, (ez)n = enz. 4. ez is periodic with period 2pi. Indeed more is true: ez = ew () z − w = 2pin for some n 2 Z Proof. Part 1 follows trivially from (∗). To prove 2, recall the multiple-angle formulae for cosine and sine. Part 3 requires an induction using part 2 with z = w. Part 4 is more interesting: certainly ew+2pin = ew by the periodicity of sine and cosine. Now suppose ez = ew where z = x + iy and w = u + iv. Then, by considering the modulus and argument, ( ex = eu exeiy = eueiv =) y = v + 2pin for some n 2 Z We conclude that x = u and so z − w = i(y − v) = 2pin. -

Inverse Trigonometric Functions
Chapter 2 INVERSE TRIGONOMETRIC FUNCTIONS vMathematics, in general, is fundamentally the science of self-evident things. — FELIX KLEIN v 2.1 Introduction In Chapter 1, we have studied that the inverse of a function f, denoted by f–1, exists if f is one-one and onto. There are many functions which are not one-one, onto or both and hence we can not talk of their inverses. In Class XI, we studied that trigonometric functions are not one-one and onto over their natural domains and ranges and hence their inverses do not exist. In this chapter, we shall study about the restrictions on domains and ranges of trigonometric functions which ensure the existence of their inverses and observe their behaviour through graphical representations. Besides, some elementary properties will also be discussed. The inverse trigonometric functions play an important Aryabhata role in calculus for they serve to define many integrals. (476-550 A. D.) The concepts of inverse trigonometric functions is also used in science and engineering. 2.2 Basic Concepts In Class XI, we have studied trigonometric functions, which are defined as follows: sine function, i.e., sine : R → [– 1, 1] cosine function, i.e., cos : R → [– 1, 1] π tangent function, i.e., tan : R – { x : x = (2n + 1) , n ∈ Z} → R 2 cotangent function, i.e., cot : R – { x : x = nπ, n ∈ Z} → R π secant function, i.e., sec : R – { x : x = (2n + 1) , n ∈ Z} → R – (– 1, 1) 2 cosecant function, i.e., cosec : R – { x : x = nπ, n ∈ Z} → R – (– 1, 1) 2021-22 34 MATHEMATICS We have also learnt in Chapter 1 that if f : X→Y such that f(x) = y is one-one and onto, then we can define a unique function g : Y→X such that g(y) = x, where x ∈ X and y = f(x), y ∈ Y. -
Inverse Trigonometric Functions
INVERSE TRIGONOMETRIC FUNCTIONS MATH 153, SECTION 55 (VIPUL NAIK) Corresponding material in the book: Section 7.7. What students should already know: The definitions of the trigonometric functions and the key identities relating them. What students should definitely get: The definitions of the inverse trigonometric functions for sine and cosine. The definitions of the other inverse trigonometric functions, and the differentiation rules for these functions. The application of these to some specific types of indefinite integration. What students should hopefully get: The domain/range subtleties for inverse trigonometric func- tions. The one-sided nature of inverses, and how to compute arcsin ◦ sin and similar things in general. The “magic” of finding inverse trigonometric functions as antiderivatives of algebraic functions (rational functions and radical functions). Note: If you would like a more detailed review of trigonometry concepts and ideas, please look at the notes titled Trigonometry review back from 152. These notes were not covered in class, but were included for reference. Executive summary Words ... (1) The functions sin, cos, tan, and their reciprocals are all periodic functions. While tan and cot have a period of π, the other four have a period of 2π each. While sin and cos are continuous and defined for all real numbers, the other four functions have points of discontinuity where they approach infinities of different signs from both sides. Also, tan and cot are one-to-one on a single period domain, while the other functions are usually two-to-one. (2) To construct inverses to these functions, we take intervals small enough such that the function is one-to-one restricted to that interval, but the range of the function restricted to that interval is the whole range. -
Having Fun with Lambert W(X) Function Arxiv:1003.1628V2
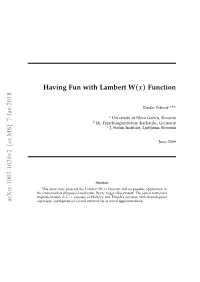
Having Fun with Lambert W(x) Function Darko Vebericˇ a,b,c a University of Nova Gorica, Slovenia b IK, Forschungszentrum Karlsruhe, Germany c J. Stefan Institute, Ljubljana, Slovenia June 2009 Abstract This short note presents the Lambert W(x) function and its possible application in the framework of physics related to the Pierre Auger Observatory. The actual numerical implementation in C++ consists of Halley’s and Fritsch’s iteration with branch-point arXiv:1003.1628v2 [cs.MS] 7 Jan 2018 expansion, asymptotic series and rational fits as initial approximations. 0 W0 -1 L x -2 W H -1 W -3 -4 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 x Figure 1: The two branches of the Lambert W function, W−1(x) in blue and W0(x) in red. The branching point at (−e−1, −1) is denoted with a green dash. 1 Introduction The Lambert W(x) function is defined as the inverse function of y exp y = x, (1) the solution being given by y = W(x), (2) or shortly W(x) exp W(x) = x. (3) Since the x 7! x exp x mapping is not injective, no unique inverse of the x exp x function exists. As can be seen in Fig.1, the Lambert function has two real branches with a branching −1 point located at (−e , −1). The bottom branch, W−1(x), is defined in the interval x 2 [−e−1, 0] and has a negative singularity for x ! 0−. The upper branch is defined for x 2 [−e−1, ¥]. -

Inverse Trigonometric Functions
Natural Trigonometry INVERSE TRIGONOMETRIC FUNCTIONS We can think of the act of computing the sine of an angle as a function operation. “Sine” assigns to each angle θ the height of the Sun at angle of elevation θ on a circle of radius 1. Similarly, “cosine” is a function that assigns to each real number, an angle measure θ , a real number between −1 and 1, the “overness” of the Sun at that angle of elevation θ . To each input, one and only one output value is assigned. Question 1: Can “tangent” in trigonometry also be thought of as a function? If so, what are the allowable inputs (the domain)? What possible outputs could you see (the range)? It’s fun to wonder if we can go backwards. Given a height value first, can we determine which angle has that sine value? Given an overness value first, can we determine which angle has that cosine value? The trouble here, of course, that there that are many different angle of elevation values that yield a Sun position of the same height. For example, for a height of h = 0.5, we see that sin( 30 ) , sin( 150 ) , and sin(− 210 ) , for example, all have value h . (Make sure you truly understand this.) JAMES TANTON 1 Natural Trigonometry Question 2: Find seven different angles θ for which cos(θ ) = − 0.5. Question 3: Find three different angles θ for which tan(θ ) = − 1. There are an infinitude of angle measures θ for which sin(θ ) = 0.5 . They are 30 and 150 , and these two angles adjusted by positive or negative integer multiples of 360 (to give 30+= 360 390 and 30−=− 720 690 and 150+= 3600 3750 , and such). -

Inverse Trigonometric Functions
Chapter 2 INVERSE TRIGONOMETRIC FUNCTIONS vMathematics, in general, is fundamentally the science of self-evident things. — FELIX KLEIN v 2.1 Introduction In Chapter 1, we have studied that the inverse of a function f, denoted by f–1, exists if f is one-one and onto. There are many functions which are not one-one, onto or both and hence we can not talk of their inverses. In Class XI, we studied that trigonometric functions are not one-one and onto over their natural domains and ranges and hence their inverses do not exist. In this chapter, we shall study about the restrictions on domains and ranges of trigonometric functions which ensure the existence of their inverses and observe their behaviour through graphical representations. Besides, some elementary properties will also be discussed. The inverse trigonometric functions play an important Aryabhata role in calculus for they serve to define many integrals. (476-550 A. D.) The concepts of inverse trigonometric functions is also used in science and engineering. 2.2 Basic Concepts In Class XI, we have studied trigonometric functions, which are defined as follows: sine function, i.e., sine : R → [– 1, 1] cosine function, i.e., cos : R → [– 1, 1] π tangent function, i.e., tan : R – { x : x = (2n + 1) , n ∈ Z} → R 2 cotangent function, i.e., cot : R – { x : x = nπ, n ∈ Z} → R π secant function, i.e., sec : R – { x : x = (2n + 1) , n ∈ Z} → R – (– 1, 1) 2 cosecant function, i.e., cosec : R – { x : x = nπ, n ∈ Z} → R – (– 1, 1) 2019-20 34 MATHEMATICS We have also learnt in Chapter 1 that if f : X→Y such that f(x) = y is one-one and onto, then we can define a unique function g : Y→X such that g(y) = x, where x ∈ X and y = f(x), y ∈ Y. -

Properties and Computation of the Inverse of the Gamma Function
Western University Scholarship@Western Electronic Thesis and Dissertation Repository 4-23-2018 11:30 AM Properties and Computation of the Inverse of the Gamma function Folitse Komla Amenyou The University of Western Ontario Supervisor Jeffrey,David The University of Western Ontario Graduate Program in Applied Mathematics A thesis submitted in partial fulfillment of the equirr ements for the degree in Master of Science © Folitse Komla Amenyou 2018 Follow this and additional works at: https://ir.lib.uwo.ca/etd Part of the Numerical Analysis and Computation Commons Recommended Citation Amenyou, Folitse Komla, "Properties and Computation of the Inverse of the Gamma function" (2018). Electronic Thesis and Dissertation Repository. 5365. https://ir.lib.uwo.ca/etd/5365 This Dissertation/Thesis is brought to you for free and open access by Scholarship@Western. It has been accepted for inclusion in Electronic Thesis and Dissertation Repository by an authorized administrator of Scholarship@Western. For more information, please contact [email protected]. Abstract We explore the approximation formulas for the inverse function of Γ. The inverse function of Γ is a multivalued function and must be computed branch by branch. We compare ˇ three approximations for the principal branch Γ0. Plots and numerical values show that the choice of the approximation depends on the domain of the arguments, specially for small arguments. We also investigate some iterative schemes and find that the Inverse Quadratic Interpolation scheme is better than Newton's scheme for improving the initial approximation. We introduce the contours technique for extending a real-valued function into the complex plane using two examples from the elementary functions: the log and the arcsin functions. -

The Lambert W Function 1 0 Robert M
Princeton Companion to Applied Mathematics Proof 1 W W The Lambert W Function 1 0 Robert M. Corless and David J. Jeffrey –e–1 1 Definition and Basic Properties z –1 1 2 3 For a given complex number z, the equation wew = z –1 has a countably infinite number of solutions, which are denoted by Wk(z) for integers k. Each choice of k speci- –2 fies a branch of the Lambert W function. By convention, only the branches k = 0 (called the principal branch) and k =−1 are real-valued for any z; the range of every other branch excludes the real axis, although the range –3 of W1(z) includes (−∞, −1/e] in its closure. Only W0(z) W–1 contains positive values in its range (see figure 1). When z =−1/e (the only nonzero branch point), there is a –4 w double root w =−1 of the basic equation we = z. Figure 1 Real branches of the Lambert W function. The The conventional choice of branches assigns solid line is the principal branch W0; the dashed line is W−1, which is the only other branch that takes real values. The W (− / ) = W (− / ) =− 0 1 e −1 1 e 1 small filled circle at the branch point corresponds to the 2 one in figure 2. and implies that W1(−1/e−iε ) =−1+O(ε) is arbitrar- ily close to −1, because the conventional branch choice means that the point −1 is on the border between these The Wright ω function helps to solve the equation three branches. -

Complex Logarithms
SECTION 3.5 95 §3.5 Complex Logarithm Function The real logarithm function ln x is defined as the inverse of the exponential function — y =lnx is the unique solution of the equation x = ey. This works because ex is a x1 x2 z one-to-one function; if x1 =6 x2, then e =6 e . This is not the case for e ; we have seen that ez is 2πi-periodic so that all complex numbers of the form z +2nπi are mapped by w = ez onto the same complex number as z. To define the logarithm function, log z, as the inverse of ez is clearly going to lead to difficulties, and these difficulties are much like those encountered when finding the inverse function of sin x in real-variable calculus. Let us proceed. We call w a logarithm of z, and write w = log z,ifz = ew. To find w we let w = u + vi be the Cartesian form for w and z = reθi be the exponential form for z. When we substitute these into z = ew, reθi = eu+vi = euevi. According to conditions 1.20, equality of these complex numbers implies that eu = r or u =lnr, and v = θ = arg z. Thus, w =lnr + θi, and a logarithm of a complex number z is log z =ln|z| + (arg z)i. (3.21) We use ln only for logarithms of real numbers; log denotes logarithms of com- plex numbers using base e (and no other base is used). Because equation 3.21 yields logarithms of every nonzero complex number, we have defined the complex logarithm function. -

Long Lecture Notes
NST Part IB Complex Methods Lecture Notes Abstract This document contains the long version of the lecture notes for the IB course Complex Methods. These notes are extensive and written such that they can be consumed either together with the lecture or on their own. In drafting these notes, I am indebted to previous lecturers of this course and, in particular, the notes by R. E. Hunt (see also Dexter Chua's site https://dec41.user.srcf.net/notes/) and Gary Gibbons. I also thank Owain Salter Fitz-Gibbon and Miren Radia for discussions and comments on the lecture notes. These notes assume that readers are already familiar with complex numbers, calculus n in multi-dimensional real space R , and Fourier transforms. The most important features of these three areas are briefly summarized, but not at the level of a dedicated lecture. This course is primarily aimed at applications of complex methods; readers interested in a more rigorous treatment of proofs are refered to the IB Complex Analysis lecture. Some more extensive discussions may also be found in the following books, though readers are not required to have studied them. • M. J. Ablowitz and A. S. Fokas, Complex variables: introduction and applications. Cambridge University Press (2003) • G. B. Arfken, H. J. Weber, and F. E. Harris, Mathematical Methods for Physicists. Elsevier (2013) • G. J. O. Jameson, A First Course in Complex Functions. Chapman and Hall (1970) • T. Needham, Visual complex analysis, Clarendon (1998) • H. A. Priestley, Introduction to Complex Analysis. Clarendon (1990) • K. F. Riley, M. P. Hobson, and S. -

The Gamma Function (Factorial Function)
CHAPTER 8 THE GAMMA FUNCTION (FACTORIAL FUNCTION) The gamma function appears occasionally in physical problems such as the normalization of Coulomb wave functions and the computation of probabilities in statistical mechanics. In general, however, it has less direct physical application and interpretation than, say, the Legendre and Bessel functions of Chapters 11 and 12. Rather, its importance stems from its usefulness in developing other functions that have direct physical application. The gamma function, therefore, is included here. 8.1 DEFINITIONS,SIMPLE PROPERTIES At least three different, convenient definitions of the gamma function are in common use. Our first task is to state these definitions, to develop some simple, direct consequences, and to show the equivalence of the three forms. Infinite Limit (Euler) The first definition, named after Euler, is 1 2 3 n Ŵ(z) lim · · ··· nz,z0, 1, 2, 3,.... (8.1) ≡ n z(z 1)(z 2) (z n) = − − − →∞ + + ··· + This definition of Ŵ(z) is useful in developing the Weierstrass infinite-product form of Ŵ(z), Eq. (8.16), and in obtaining the derivative of ln Ŵ(z) (Section 8.2). Here and else- 499 500 Chapter 8 Gamma–Factorial Function where in this chapter z may be either real or complex. Replacing z with z 1, we have + 1 2 3 n z 1 Ŵ(z 1) lim · · ··· n + + = n (z 1)(z 2)(z 3) (z n 1) →∞ + + + ··· + + nz 1 2 3 n lim · · ··· nz = n z n 1 · z(z 1)(z 2) (z n) →∞ + + + + ··· + zŴ(z). (8.2) = This is the basic functional relation for the gamma function. -
1 Discussion on Multi-Valued Functions
Week 3 notes, Math 7651 1 Discussion on multi-valued functions Log function : Note that if z is written in its polar representation: z = r eiθ, where r = z and θ = arg z, then | | log z log r + i θ + 2inπ (1) ≡ for n Z is consistent with exp [log z] = z. This is easily shown through substitution. However,∈ (1) is not unambiguous on the plane. To make (1) a single-valued function (for a particular n) on the complex plane, one needs to restrict θ (θ , 2 π + θ ] , (2) ∈ 0 0 or [θ0 , 2 π + θ0) where θ0 is some constant (3) Remark 1 One might wonder if (1) provides the most general representation of the inverse of exp function. The following lemma answers this in the positive. Lemma 1 If log1 and log2 are two inverse functions of exp, then for any particular z, log z log z = 2 π i n (4) 1 − 2 for n Z. ∈ Proof. Let w = log z and w = log z. Then, exp(w w )= ew1 /ew2 = 1. Since for 1 1 2 2 1 − 2 ζ = x + iy, eζ 1 = 0 implies ex cos y 1=0and ex sin y = 0, we deduce y = 2nπ, and x = 0, implying−w w = ζ =2 π i n − 1 − 2 Remark 2 : It is possible that log z = log z for some set of z C, not for others. 1 2 ∈ For instance, if we define log z = log r + i θ, with θ in ( π, π] , (5) 1 − log2 z = log r + i θ, with θ in [0, 2 π) , (6) then clearly log1 z = log2 z for z in the first and second quadrant but not equal in the third and fourth quadrant.