1 Discussion on Multi-Valued Functions
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Branch Points and Cuts in the Complex Plane
BRANCH POINTS AND CUTS IN THE COMPLEX PLANE Link to: physicspages home page. To leave a comment or report an error, please use the auxiliary blog and include the title or URL of this post in your comment. Post date: 6 July 2021. We’ve looked at contour integration in the complex plane as a technique for evaluating integrals of complex functions and finding infinite integrals of real functions. In some cases, the complex functions that are to be integrated are multi- valued. As a preliminary to the contour integration of such functions, we’ll look at the concepts of branch points and branch cuts here. The stereotypical function that is used to introduce branch cuts in most books is the complex logarithm function logz which is defined so that elogz = z (1) If z is real and positive, this reduces to the familiar real logarithm func- tion. (Here I’m using natural logs, so the real natural log function is usually written as ln. In complex analysis, the term log is usually used, so be careful not to confuse it with base 10 logs.) To generalize it to complex numbers, we write z in modulus-argument form z = reiθ (2) and apply the usual rules for taking a log of products and exponentials: logz = logr + iθ (3) = logr + iargz (4) To see where problems arise, suppose we start with z on the positive real axis and increase θ. Everything is fine until θ approaches 2π. When θ passes 2π, the original complex number z returns to its starting value, as given by 2. -

Riemann Surfaces
RIEMANN SURFACES AARON LANDESMAN CONTENTS 1. Introduction 2 2. Maps of Riemann Surfaces 4 2.1. Defining the maps 4 2.2. The multiplicity of a map 4 2.3. Ramification Loci of maps 6 2.4. Applications 6 3. Properness 9 3.1. Definition of properness 9 3.2. Basic properties of proper morphisms 9 3.3. Constancy of degree of a map 10 4. Examples of Proper Maps of Riemann Surfaces 13 5. Riemann-Hurwitz 15 5.1. Statement of Riemann-Hurwitz 15 5.2. Applications 15 6. Automorphisms of Riemann Surfaces of genus ≥ 2 18 6.1. Statement of the bound 18 6.2. Proving the bound 18 6.3. We rule out g(Y) > 1 20 6.4. We rule out g(Y) = 1 20 6.5. We rule out g(Y) = 0, n ≥ 5 20 6.6. We rule out g(Y) = 0, n = 4 20 6.7. We rule out g(C0) = 0, n = 3 20 6.8. 21 7. Automorphisms in low genus 0 and 1 22 7.1. Genus 0 22 7.2. Genus 1 22 7.3. Example in Genus 3 23 Appendix A. Proof of Riemann Hurwitz 25 Appendix B. Quotients of Riemann surfaces by automorphisms 29 References 31 1 2 AARON LANDESMAN 1. INTRODUCTION In this course, we’ll discuss the theory of Riemann surfaces. Rie- mann surfaces are a beautiful breeding ground for ideas from many areas of math. In this way they connect seemingly disjoint fields, and also allow one to use tools from different areas of math to study them. -

3 Elementary Functions
3 Elementary Functions We already know a great deal about polynomials and rational functions: these are analytic on their entire domains. We have thought a little about the square-root function and seen some difficulties. The remaining elementary functions are the exponential, logarithmic and trigonometric functions. 3.1 The Exponential and Logarithmic Functions (§30–32, 34) We have already defined the exponential function exp : C ! C : z 7! ez using Euler’s formula ez := ex cos y + iex sin y (∗) and seen that its real and imaginary parts satisfy the Cauchy–Riemann equations on C, whence exp C d z = z is entire (analytic on ). Indeed recall that dz e e . We have also seen several of the basic properties of the exponential function, we state these and several others for reference. Lemma 3.1. Throughout let z, w 2 C. 1. ez 6= 0. ez 2. ez+w = ezew and ez−w = ew 3. For all n 2 Z, (ez)n = enz. 4. ez is periodic with period 2pi. Indeed more is true: ez = ew () z − w = 2pin for some n 2 Z Proof. Part 1 follows trivially from (∗). To prove 2, recall the multiple-angle formulae for cosine and sine. Part 3 requires an induction using part 2 with z = w. Part 4 is more interesting: certainly ew+2pin = ew by the periodicity of sine and cosine. Now suppose ez = ew where z = x + iy and w = u + iv. Then, by considering the modulus and argument, ( ex = eu exeiy = eueiv =) y = v + 2pin for some n 2 Z We conclude that x = u and so z − w = i(y − v) = 2pin. -

The Monodromy Groups of Schwarzian Equations on Closed
Annals of Mathematics The Monodromy Groups of Schwarzian Equations on Closed Riemann Surfaces Author(s): Daniel Gallo, Michael Kapovich and Albert Marden Reviewed work(s): Source: Annals of Mathematics, Second Series, Vol. 151, No. 2 (Mar., 2000), pp. 625-704 Published by: Annals of Mathematics Stable URL: http://www.jstor.org/stable/121044 . Accessed: 15/02/2013 18:57 Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at . http://www.jstor.org/page/info/about/policies/terms.jsp . JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms of scholarship. For more information about JSTOR, please contact [email protected]. Annals of Mathematics is collaborating with JSTOR to digitize, preserve and extend access to Annals of Mathematics. http://www.jstor.org This content downloaded on Fri, 15 Feb 2013 18:57:11 PM All use subject to JSTOR Terms and Conditions Annals of Mathematics, 151 (2000), 625-704 The monodromy groups of Schwarzian equations on closed Riemann surfaces By DANIEL GALLO, MICHAEL KAPOVICH, and ALBERT MARDEN To the memory of Lars V. Ahlfors Abstract Let 0: 7 (R) -* PSL(2, C) be a homomorphism of the fundamental group of an oriented, closed surface R of genus exceeding one. We will establish the following theorem. THEOREM. Necessary and sufficient for 0 to be the monodromy represen- tation associated with a complex projective stucture on R, either unbranched or with a single branch point of order 2, is that 0(7ri(R)) be nonelementary. -

Inverse Trigonometric Functions
Chapter 2 INVERSE TRIGONOMETRIC FUNCTIONS vMathematics, in general, is fundamentally the science of self-evident things. — FELIX KLEIN v 2.1 Introduction In Chapter 1, we have studied that the inverse of a function f, denoted by f–1, exists if f is one-one and onto. There are many functions which are not one-one, onto or both and hence we can not talk of their inverses. In Class XI, we studied that trigonometric functions are not one-one and onto over their natural domains and ranges and hence their inverses do not exist. In this chapter, we shall study about the restrictions on domains and ranges of trigonometric functions which ensure the existence of their inverses and observe their behaviour through graphical representations. Besides, some elementary properties will also be discussed. The inverse trigonometric functions play an important Aryabhata role in calculus for they serve to define many integrals. (476-550 A. D.) The concepts of inverse trigonometric functions is also used in science and engineering. 2.2 Basic Concepts In Class XI, we have studied trigonometric functions, which are defined as follows: sine function, i.e., sine : R → [– 1, 1] cosine function, i.e., cos : R → [– 1, 1] π tangent function, i.e., tan : R – { x : x = (2n + 1) , n ∈ Z} → R 2 cotangent function, i.e., cot : R – { x : x = nπ, n ∈ Z} → R π secant function, i.e., sec : R – { x : x = (2n + 1) , n ∈ Z} → R – (– 1, 1) 2 cosecant function, i.e., cosec : R – { x : x = nπ, n ∈ Z} → R – (– 1, 1) 2021-22 34 MATHEMATICS We have also learnt in Chapter 1 that if f : X→Y such that f(x) = y is one-one and onto, then we can define a unique function g : Y→X such that g(y) = x, where x ∈ X and y = f(x), y ∈ Y. -

Sequential Discontinuities of Feynman Integrals and the Monodromy Group
Sequential Discontinuities of Feynman Integrals and the Monodromy Group Jacob L. Bourjaily1,2, Holmfridur Hannesdottir3, Andrew J. McLeod1, Matthew D. Schwartz3, and Cristian Vergu1 1Niels Bohr International Academy and Discovery Center, Niels Bohr Institute, University of Copenhagen, Blegdamsvej 17, DK-2100, Copenhagen Ø, Denmark 2Institute for Gravitation and the Cosmos, Department of Physics, Pennsylvania State University, University Park, PA 16892, USA 3Department of Physics, Harvard University, Cambridge, MA 02138, USA July 29, 2020 Abstract We generalize the relation between discontinuities of scattering amplitudes and cut diagrams to cover sequential discontinuities (discontinuities of discontinuities) in arbitrary momentum channels. The new relations are derived using time-ordered per- turbation theory, and hold at phase-space points where all cut momentum channels are simultaneously accessible. As part of this analysis, we explain how to compute se- quential discontinuities as monodromies and explore the use of the monodromy group in characterizing the analytic properties of Feynman integrals. We carry out a number of cross-checks of our new formulas in polylogarithmic examples, in some cases to all loop orders. arXiv:2007.13747v1 [hep-th] 27 Jul 2020 Contents 1 Introduction1 2 Cutting rules: a review4 2.1 Cutkosky, 't Hooft and Veltman . .5 2.2 Time-ordered perturbation theory . .7 3 Discontinuities 10 3.1 Covariant approach . 11 3.2 Discontinuities in TOPT . 14 4 Discontinuities as monodromies 17 4.1 Warm-up: the natural logarithm . 17 4.2 The monodromy group . 21 4.3 Monodromies of propagators . 31 5 Sequential discontinuities 33 5.1 Sequential discontinuities in the same channel . 34 5.2 Sequential discontinuities in different channels . -

Integral Formula for the Bessel Function of the First Kind
INTEGRAL FORMULA FOR THE BESSEL FUNCTION OF THE FIRST KIND ENRICO DE MICHELI ABSTRACT. In this paper, we prove a new integral representation for the Bessel function of the first kind Jµ (z), which holds for any µ,z C. ∈ 1. INTRODUCTION In this note, we prove the following integral representation of the Bessel function of the first kind Jµ (z), which holds for unrestricted complex values of the order µ: z µ π 1 izcosθ 1 iθ C C (1.1) Jµ (z)= e γ∗ µ, 2 ize dθ (µ ;z ), 2π 2 π ∈ ∈ Z− where γ∗ denotes the Tricomi version of the (lower) incomplete gamma function. Lower and upper incomplete gamma functions arise from the decomposition of the Euler integral for the gamma function: w t µ 1 (1.2a) γ(µ,w)= e− t − dt (Re µ > 0), 0 Z ∞ t µ 1 (1.2b) Γ(µ,w)= e− t − dt ( argw < π). w | | Z Analytical continuation with respect to both parameters can be based either on the integrals in (1.2) or on series expansions of γ(µ,w), e.g. [4, Eq. 9.2(4)]: ∞ ( 1)n wµ+n (1.3) γ(µ,w)= ∑ − , n=0 n! µ + n which shows that γ(µ,w) has simple poles at µ = 0, 1, 2,... and, in general, is a multi- valued (when µ is not a positive integer) function with− a− branch point at w = 0. Similarly, even Γ(µ,w) is in general multi-valued but it is an entire function of µ. Inconveniences re- lated to poles and multi-valuedness of γ can be circumvented by introducing what Tricomi arXiv:2012.02887v1 [math.CA] 4 Dec 2020 called the fundamental function of the incomplete gamma theory [11, §2, p. -

CHAPTER 4 Elementary Functions Dr. Pulak Sahoo
CHAPTER 4 Elementary Functions BY Dr. Pulak Sahoo Assistant Professor Department of Mathematics University Of Kalyani West Bengal, India E-mail : sahoopulak1@gmail:com 1 Module-3: Multivalued Functions-I 1 Introduction We recall that a function w = f(z) is called multivalued function if for all or some z of the domain, we find more than one value of w. Thus, a function f is said to be single valued if f satisfies f(z) = f[z(r; θ)] = f[z(r; θ + 2π)]: Otherwise, f is called as a multivalued function. We know that a multivalued function can be considered as a collection of single valued functions. For analytical properties of a multivalued function, we just consider those domains in which the functions are single valued. Branch By branch of a multivalued function f(z) defined on a domain D1 we mean a single valued function g(z) which is analytic in some sub-domain D ⊂ D1 at each point of which g(z) is one of the values of f(z). Branch Points and Branch Lines A point z = α is called a branch point of a multivalued function f(z) if the branches of f(z) are interchanged when z describes a closed path about α. We consider the function w = z1=2. Suppose that we allow z to make a complete circuit around the origin in the anticlockwise sense starting from the point P. Thus we p p have z = reiθ; w = reiθ=2; so that at P, θ = β and w = reiβ=2: After a complete p p circuit back to P, θ = β + 2π and w = rei(β+2π)=2 = − reiβ=2: Thus we have not achieved the same value of w with which we started. -

Riemann Surfaces
Riemann Surfaces See Arfken & Weber section 6.7 (mapping) or [1][sections 106-108] for more information. 1 Definition A Riemann surface is a generalization of the complex plane to a surface of more than one sheet such that a multiple-valued function on the original complex plane has only one value at each point of the surface. Briefly, the notion of a Riemann surface is important whenever considering functions with branch cuts. Perhaps the easiest example is the Riemann surface for log z. Write z = r exp(iθ), then log z = (log r)+ iθ. However, the θ in that expression is not uniquely defined – it is only defined up to a multiple of 2π. As you walk around the origin of the complex plane, the function log z comes back to itself up to additions of 2πi. We can construct a cover of the complex plane on which log z is single-valued by taking a helix over the complex plane – going 360◦ about the origin takes from you from sheet of the cover to another sheet. Put another way, every time you go through the branch cut, you go to a different sheet. We can construct such a cover as follows. (Our discussion here is verbatim from [1][section 106].) Consider the complex z plane, with the origin deleted, as a sheet R0 which is cut along the positive half of the real axis. On that sheet, let θ range from 0 to 2π. Let a second sheet R1 be cut in the same way and placed in front of the sheet R0. -

Full Text (PDF Format)
Methods and Applications of Analysis © 1998 International Press 5 (4) 1998, pp. 425-438 ISSN 1073-2772 ON THE RESURGENCE PROPERTIES OF THE UNIFORM ASYMPTOTIC EXPANSION OF THE INCOMPLETE GAMMA FUNCTION A. B. Olde Daalhuis ABSTRACT. We examine the resurgence properties of the coefficients 07.(77) ap- pearing in the uniform asymptotic expansion of the incomplete gamma function. For the coefficients cr(T7), we give an asymptotic approximation as r -» 00 that is a sum of two incomplete beta functions plus a simple asymptotic series in which the coefficients are again Cm(rj). The method of this paper is based on the Borel-Laplace transform, which means that next to the asymptotic approximation of CrC??), we also obtain an exponentially-improved asymptotic expansion for the incomplete gamma function. 1. Introduction and summary Recently it has been shown in many papers that the incomplete gamma function is the basis function for exponential asymptotics. The asymptotic expansion of r(a, z) as z —> 00 and a fixed is rather simple. However, in exponential asymptotics, we need the asymptotic properties of r(a, z) as a —> 00 and z = Aa, A 7^ 0, a complex constant. In [9] and [11], the uniform asymptotic expansions of the (normalized) incomplete gamma function as a —> 00 are given as r(« + ll^-rf-a,2e-") ~ ^erfc(-itijia) + >-,=; ^MlX-or' (Lib) where 77 is defined as 1 77=(2(A-l-lnA))t (1.2) and z x= -. (1.3) a The complementary error function in (1.1b) will give the Stokes smoothing in expo- nentially improved asymptotics for integrals and solutions of differential equations. -
Inverse Trigonometric Functions
INVERSE TRIGONOMETRIC FUNCTIONS MATH 153, SECTION 55 (VIPUL NAIK) Corresponding material in the book: Section 7.7. What students should already know: The definitions of the trigonometric functions and the key identities relating them. What students should definitely get: The definitions of the inverse trigonometric functions for sine and cosine. The definitions of the other inverse trigonometric functions, and the differentiation rules for these functions. The application of these to some specific types of indefinite integration. What students should hopefully get: The domain/range subtleties for inverse trigonometric func- tions. The one-sided nature of inverses, and how to compute arcsin ◦ sin and similar things in general. The “magic” of finding inverse trigonometric functions as antiderivatives of algebraic functions (rational functions and radical functions). Note: If you would like a more detailed review of trigonometry concepts and ideas, please look at the notes titled Trigonometry review back from 152. These notes were not covered in class, but were included for reference. Executive summary Words ... (1) The functions sin, cos, tan, and their reciprocals are all periodic functions. While tan and cot have a period of π, the other four have a period of 2π each. While sin and cos are continuous and defined for all real numbers, the other four functions have points of discontinuity where they approach infinities of different signs from both sides. Also, tan and cot are one-to-one on a single period domain, while the other functions are usually two-to-one. (2) To construct inverses to these functions, we take intervals small enough such that the function is one-to-one restricted to that interval, but the range of the function restricted to that interval is the whole range. -
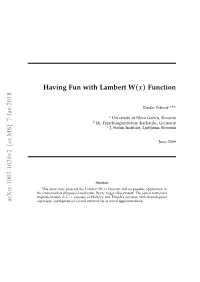
Having Fun with Lambert W(X) Function Arxiv:1003.1628V2
Having Fun with Lambert W(x) Function Darko Vebericˇ a,b,c a University of Nova Gorica, Slovenia b IK, Forschungszentrum Karlsruhe, Germany c J. Stefan Institute, Ljubljana, Slovenia June 2009 Abstract This short note presents the Lambert W(x) function and its possible application in the framework of physics related to the Pierre Auger Observatory. The actual numerical implementation in C++ consists of Halley’s and Fritsch’s iteration with branch-point arXiv:1003.1628v2 [cs.MS] 7 Jan 2018 expansion, asymptotic series and rational fits as initial approximations. 0 W0 -1 L x -2 W H -1 W -3 -4 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 x Figure 1: The two branches of the Lambert W function, W−1(x) in blue and W0(x) in red. The branching point at (−e−1, −1) is denoted with a green dash. 1 Introduction The Lambert W(x) function is defined as the inverse function of y exp y = x, (1) the solution being given by y = W(x), (2) or shortly W(x) exp W(x) = x. (3) Since the x 7! x exp x mapping is not injective, no unique inverse of the x exp x function exists. As can be seen in Fig.1, the Lambert function has two real branches with a branching −1 point located at (−e , −1). The bottom branch, W−1(x), is defined in the interval x 2 [−e−1, 0] and has a negative singularity for x ! 0−. The upper branch is defined for x 2 [−e−1, ¥].