Complex Representations of Functions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

GPU-Based Visualization of Domain-Coloured Algebraic Riemann Surfaces
GPU-based visualization of domain-coloured algebraic Riemann surfaces Stefan Kranich∗ 11 November 2015 Abstract We examine an algorithm for the visualization of domain-coloured Riemann surfaces of plane algebraic curves. The approach faithfully reproduces the topology and the holomorphic structure of the Riemann surface. We discuss how the algorithm can be implemented efficiently in OpenGL with geometry shaders, and (less efficiently) even in WebGL with multiple render targets and floating point textures. While the generation of the surface takes noticeable time in both implementations, the visualization of a cached Riemann surface mesh is possible with interactive performance. This allows us to visually explore otherwise almost unimaginable mathematical objects. As examples, we look at the complex square root and the folium of Descartes. For the folium of Descartes, the visualization reveals features of the algebraic curve that are not obvious from its equation. 1 Introduction 1.1 Mathematical background The following basic example illustrates what we would like to visualize. Example 1.1. Let y be the square root of x, p y = x: If x is a non-negative real number, we typically define y as the non-negative real arXiv:1507.04571v3 [cs.GR] 10 Nov 2015 number whose square equals x, i.e. we always choose the non-negative solution of the equation y2 − x = 0 (1) p as y = x. For negative real numbers x, no real number y solves Equation 1. However, if we define the imaginary unit i as a number with the property that i2 = −1 then the square root of x becomes the purely imaginary number y = ipjxj: ∗Zentrum Mathematik (M10), Technische Universit¨atM¨unchen, 85747 Garching, Germany; E-mail address: [email protected] 1 Im Im Re Re Figure 1.2: When a complex number (black points) runs along a circle centred at the origin of the complex plane, its square roots (white points) move at half the angular velocity (left image). -

Visualization of Complex Function Graphs in Augmented Reality
M A G I S T E R A R B E I T Visualization of Complex Function Graphs in Augmented Reality ausgeführt am Institut für Softwaretechnik und Interaktive Systeme der Technischen Universität Wien unter der Anleitung von Univ.Ass. Mag. Dr. Hannes Kaufmann durch Robert Liebo Brahmsplatz 7/11 1040 Wien _________ ____________________________ Datum Unterschrift Abstract Understanding the properties of a function over complex numbers can be much more difficult than with a function over real numbers. This work provides one approach in the area of visualization and augmented reality to gain insight into these properties. The applied visualization techniques use the full palette of a 3D scene graph's basic elements, the complex function can be seen and understood through the location, the shape, the color and even the animation of a resulting visual object. The proper usage of these visual mappings provides an intuitive graphical representation of the function graph and reveals the important features of a specific function. Augmented reality (AR) combines the real world with virtual objects generated by a computer. Using multi user AR for mathematical visualization enables sophisticated educational solutions for studies dealing with complex functions. A software framework that has been implemented will be explained in detail, it is tailored to provide an optimal solution for complex function graph visualization, but shows as well an approach to visualize general data sets with more than 3 dimensions. The framework can be used in a variety of environments, a desktop setup and an immersive setup will be shown as examples. Finally some common tasks involving complex functions will be shown in connection with this framework as example usage possibilities. -

3 Elementary Functions
3 Elementary Functions We already know a great deal about polynomials and rational functions: these are analytic on their entire domains. We have thought a little about the square-root function and seen some difficulties. The remaining elementary functions are the exponential, logarithmic and trigonometric functions. 3.1 The Exponential and Logarithmic Functions (§30–32, 34) We have already defined the exponential function exp : C ! C : z 7! ez using Euler’s formula ez := ex cos y + iex sin y (∗) and seen that its real and imaginary parts satisfy the Cauchy–Riemann equations on C, whence exp C d z = z is entire (analytic on ). Indeed recall that dz e e . We have also seen several of the basic properties of the exponential function, we state these and several others for reference. Lemma 3.1. Throughout let z, w 2 C. 1. ez 6= 0. ez 2. ez+w = ezew and ez−w = ew 3. For all n 2 Z, (ez)n = enz. 4. ez is periodic with period 2pi. Indeed more is true: ez = ew () z − w = 2pin for some n 2 Z Proof. Part 1 follows trivially from (∗). To prove 2, recall the multiple-angle formulae for cosine and sine. Part 3 requires an induction using part 2 with z = w. Part 4 is more interesting: certainly ew+2pin = ew by the periodicity of sine and cosine. Now suppose ez = ew where z = x + iy and w = u + iv. Then, by considering the modulus and argument, ( ex = eu exeiy = eueiv =) y = v + 2pin for some n 2 Z We conclude that x = u and so z − w = i(y − v) = 2pin. -

Inverse Trigonometric Functions
Chapter 2 INVERSE TRIGONOMETRIC FUNCTIONS vMathematics, in general, is fundamentally the science of self-evident things. — FELIX KLEIN v 2.1 Introduction In Chapter 1, we have studied that the inverse of a function f, denoted by f–1, exists if f is one-one and onto. There are many functions which are not one-one, onto or both and hence we can not talk of their inverses. In Class XI, we studied that trigonometric functions are not one-one and onto over their natural domains and ranges and hence their inverses do not exist. In this chapter, we shall study about the restrictions on domains and ranges of trigonometric functions which ensure the existence of their inverses and observe their behaviour through graphical representations. Besides, some elementary properties will also be discussed. The inverse trigonometric functions play an important Aryabhata role in calculus for they serve to define many integrals. (476-550 A. D.) The concepts of inverse trigonometric functions is also used in science and engineering. 2.2 Basic Concepts In Class XI, we have studied trigonometric functions, which are defined as follows: sine function, i.e., sine : R → [– 1, 1] cosine function, i.e., cos : R → [– 1, 1] π tangent function, i.e., tan : R – { x : x = (2n + 1) , n ∈ Z} → R 2 cotangent function, i.e., cot : R – { x : x = nπ, n ∈ Z} → R π secant function, i.e., sec : R – { x : x = (2n + 1) , n ∈ Z} → R – (– 1, 1) 2 cosecant function, i.e., cosec : R – { x : x = nπ, n ∈ Z} → R – (– 1, 1) 2021-22 34 MATHEMATICS We have also learnt in Chapter 1 that if f : X→Y such that f(x) = y is one-one and onto, then we can define a unique function g : Y→X such that g(y) = x, where x ∈ X and y = f(x), y ∈ Y. -

Domain Coloring of Complex Functions
Domain Coloring of Complex Functions Contents 1 Introduction Not only in mathematic we are confronted with graphs of all possible data sets. In economics and science we want to present the results by plotting their function graph inside a optimal coordinate system. In complex analysis we work with holomorphic functions which are complex differen- tiable. Like in real analysis we are interesting to plot such functions as graph inside a optimal coordinate systems. The graph of holomorphic functions is a subset of the four-dimensional coordinate system. But we are limited to three dimension, because we do not know how to draw objects in higher dimensional spaces. Therefore we are forced to construct a methode to visualize such functions. In this sec- tion we give a short overview of the domain coloring which allows us to visualize the graph of complex funtions by using colors. First we give a overview of complex analysis and holomorphic function. After we have presented the main idea behind the domain coloring we discuss a example to understand the main concept of domain coloring. 1 2 Introduction to Complex Analysis 2 Introduction to Complex Analysis In this section we give a short review of the main idea of complex analysis which we need to understand the methode of domain coloring. The reader should familiar with the construction of complex numbers and the representation of such numbers with polar coordinates. In complex anlysis we work with complex function which consist of three parts: first, a set D ⊂ C of input values, which is called the domain of the function, second, the range of f in C and third, for every input value x 2 D, a unique function value f(x) in the range of f. -

Domain Coloring of Complex Functions
Domain Coloring of Complex Functions Konstantin Poelke and Konrad Polthier 1 Introduction 2 What is a Function? Let us briefly recap the definition of a Visualizing functions is an omnipresent function to fix terminology. A function f task in many sciences and almost every day consists of three parts: first, a set D of in- we are confronted with diagrams in news- put values, which is called the domain of the papers and magazines showing functions of function, second, a set Y called the range of all possible flavours. Usually such func- f and third, for every input value x ∈ D, tions are visualized by plotting their func- a unique value y ∈ Y , called the function tion graph inside an appropriate coordinate value of f at x, denoted f(x). The set Γ(f) system, with the probably most prominent of all pairs (a, f(a)), a ∈ D, is a subset of choice being the cartesian coordinate sys- the product set D × Y and called the func- tem. This allows us to get an overall im- tion graph of f. pression of the function’s behaviour as well One particular type of functions that are as to detect certain distinctive features such widely used in engineering and physics are as minimal or maximal points or points complex functions, i.e. functions f : D ⊆ where the direction of curvature changes. C → Y ⊆ C whose domain and range In particular, we can “see” the dependence are subsets of the complex numbers, and between input and output. However, this we will focus on complex functions in the technique is limited to three dimensions, following. -

Una Introducción Al Método De Dominio Colorado Con Geogebra Para
101 Una introducción al método de dominio colorado con GeoGebra para la visualización y estudio de funciones complejas Uma introdução ao método do domínio colorado com GeoGebra para visualizar e estudar funções complexas An introduction the method domain coloring with GeoGebra for visualizing and studying complex JUAN CARLOS PONCE CAMPUZANO1 0000-0003-4402-1332 researchgate.net/profile/Juan_Ponce_Campuzano geogebra.org/u/jcponce http://dx.doi.org/10.23925/2237-9657.2020.v9i1p101-119 RESUMEN Existen diversos métodos para visualizar funciones complejas, tales como graficar por separado sus componentes reales e imaginarios, mapear o transformar una región, el método de superficies analíticas y el método de dominio coloreado. Este último es uno de los métodos más recientes y aprovecha ciertas características del color y su procesamiento digital. La idea básica es usar colores, luminosidad y sombras como dimensiones adicionales, y para visualizar números complejos se usa una función real que asocia a cada número complejo un color determinado. El plano complejo puede entonces visualizarse como una paleta de colores construida a partir del esquema HSV (del inglés Hue, Saturation, Value – Matiz, Saturación, Valor). Como resultado, el método de dominio coloreado permite visualizar ceros y polos de funciones, ramas de funciones multivaluadas, el comportamiento de singularidades aisladas, entre otras propiedades. Debido a las características de GeoGebra en cuanto a los colores dinámicos, es posible implementar en el software el método de dominio coloreado para visualizar y estudiar funciones complejas, lo cual se explica en detalle en el presente artículo. Palabras claves: funciones complejas, método de dominio coloreado, colores dinámicos. RESUMO Existem vários métodos para visualizar funções complexas, como plotar seus componentes reais e imaginários separadamente, mapear ou transformar uma região, o método de superfície analítica e o método de domínio colorido. -
![Arxiv:2002.05234V1 [Cs.GR] 12 Feb 2020 Have Emerged](https://docslib.b-cdn.net/cover/9414/arxiv-2002-05234v1-cs-gr-12-feb-2020-have-emerged-2369414.webp)
Arxiv:2002.05234V1 [Cs.GR] 12 Feb 2020 Have Emerged
VISUALIZING MODULAR FORMS DAVID LOWRY-DUDA Abstract. We describe practical methods to visualize modular forms. We survey several current visualizations. We then introduce an approach that can take advantage of colormaps in python's matplotlib library and describe an implementation. 1. Introduction 1.1. Motivation. Graphs of real-valued functions are ubiquitous and com- monly serve as a source of mathematical insight. But graphs of complex functions are simultaneously less common and more challenging to make. The reason is that the graph of a complex function is naturally a surface in four dimensions, and there are not many intuitive embeddings available to capture this surface within a 2d plot. In this article, we examine different methods for visualizing plots of mod- ular forms on congruent subgroups of SL(2; Z). These forms are highly symmetric functions and we should expect their plots to capture many dis- tinctive, highly symmetric features. In addition, we wish to take advantage of the broader capabilities that exist in the python/SageMath data visualization ecosystem. There are a vast number of color choices and colormaps implemented in terms of python's matplotlib library [Hun07]. While many of these are purely aesthetic, some offer color choices friendly to color blind viewers. Further, some are designed with knowledge of color theory and human cognition to be perceptually uniform with respect to human vision. We describe this further in x3. 1.2. Broad Overview of Complex Function Plotting. Over the last 20 years, different approaches towards representing graphs of complex functions arXiv:2002.05234v1 [cs.GR] 12 Feb 2020 have emerged. -
Inverse Trigonometric Functions
INVERSE TRIGONOMETRIC FUNCTIONS MATH 153, SECTION 55 (VIPUL NAIK) Corresponding material in the book: Section 7.7. What students should already know: The definitions of the trigonometric functions and the key identities relating them. What students should definitely get: The definitions of the inverse trigonometric functions for sine and cosine. The definitions of the other inverse trigonometric functions, and the differentiation rules for these functions. The application of these to some specific types of indefinite integration. What students should hopefully get: The domain/range subtleties for inverse trigonometric func- tions. The one-sided nature of inverses, and how to compute arcsin ◦ sin and similar things in general. The “magic” of finding inverse trigonometric functions as antiderivatives of algebraic functions (rational functions and radical functions). Note: If you would like a more detailed review of trigonometry concepts and ideas, please look at the notes titled Trigonometry review back from 152. These notes were not covered in class, but were included for reference. Executive summary Words ... (1) The functions sin, cos, tan, and their reciprocals are all periodic functions. While tan and cot have a period of π, the other four have a period of 2π each. While sin and cos are continuous and defined for all real numbers, the other four functions have points of discontinuity where they approach infinities of different signs from both sides. Also, tan and cot are one-to-one on a single period domain, while the other functions are usually two-to-one. (2) To construct inverses to these functions, we take intervals small enough such that the function is one-to-one restricted to that interval, but the range of the function restricted to that interval is the whole range. -
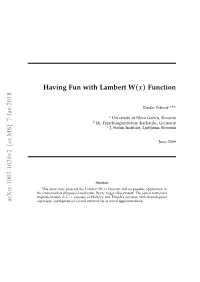
Having Fun with Lambert W(X) Function Arxiv:1003.1628V2
Having Fun with Lambert W(x) Function Darko Vebericˇ a,b,c a University of Nova Gorica, Slovenia b IK, Forschungszentrum Karlsruhe, Germany c J. Stefan Institute, Ljubljana, Slovenia June 2009 Abstract This short note presents the Lambert W(x) function and its possible application in the framework of physics related to the Pierre Auger Observatory. The actual numerical implementation in C++ consists of Halley’s and Fritsch’s iteration with branch-point arXiv:1003.1628v2 [cs.MS] 7 Jan 2018 expansion, asymptotic series and rational fits as initial approximations. 0 W0 -1 L x -2 W H -1 W -3 -4 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 x Figure 1: The two branches of the Lambert W function, W−1(x) in blue and W0(x) in red. The branching point at (−e−1, −1) is denoted with a green dash. 1 Introduction The Lambert W(x) function is defined as the inverse function of y exp y = x, (1) the solution being given by y = W(x), (2) or shortly W(x) exp W(x) = x. (3) Since the x 7! x exp x mapping is not injective, no unique inverse of the x exp x function exists. As can be seen in Fig.1, the Lambert function has two real branches with a branching −1 point located at (−e , −1). The bottom branch, W−1(x), is defined in the interval x 2 [−e−1, 0] and has a negative singularity for x ! 0−. The upper branch is defined for x 2 [−e−1, ¥]. -

Inverse Trigonometric Functions
Natural Trigonometry INVERSE TRIGONOMETRIC FUNCTIONS We can think of the act of computing the sine of an angle as a function operation. “Sine” assigns to each angle θ the height of the Sun at angle of elevation θ on a circle of radius 1. Similarly, “cosine” is a function that assigns to each real number, an angle measure θ , a real number between −1 and 1, the “overness” of the Sun at that angle of elevation θ . To each input, one and only one output value is assigned. Question 1: Can “tangent” in trigonometry also be thought of as a function? If so, what are the allowable inputs (the domain)? What possible outputs could you see (the range)? It’s fun to wonder if we can go backwards. Given a height value first, can we determine which angle has that sine value? Given an overness value first, can we determine which angle has that cosine value? The trouble here, of course, that there that are many different angle of elevation values that yield a Sun position of the same height. For example, for a height of h = 0.5, we see that sin( 30 ) , sin( 150 ) , and sin(− 210 ) , for example, all have value h . (Make sure you truly understand this.) JAMES TANTON 1 Natural Trigonometry Question 2: Find seven different angles θ for which cos(θ ) = − 0.5. Question 3: Find three different angles θ for which tan(θ ) = − 1. There are an infinitude of angle measures θ for which sin(θ ) = 0.5 . They are 30 and 150 , and these two angles adjusted by positive or negative integer multiples of 360 (to give 30+= 360 390 and 30−=− 720 690 and 150+= 3600 3750 , and such). -

Inverse Trigonometric Functions 2
INVERSE TRIGONOMETRIC FUNCTIONS 2 INTRODUCTION In chapter 1, we learnt that only one-one and onto functions are invertible. If a function f is one-one and onto, then its inverse exists and is denoted by f –1. We shall notice that trigonometric functions are not one-one over their whole domains and hence their inverse do not exist. It often happens that a given function f may not be one-one in the whole of its domain, but when we restrict it to a part of the domain, it may be so. If a function is one-one on a part of its domain, it is said to be inversible on that part only. If a function is inversible in serveral parts of its domain, it is said to have an inverse in each of these parts. In this chapter, we shall notice that trigonometric functions are not one-one over their whole domains and hence we shall restrict their domains to ensure the existence of their inverses and observe their behaviour through graphical representation. The inverse trigonometric functions play a very important role in calculus and are used extensively in science and engineering. REMARK → Let a real function f : Df Rf , where Df = domain of f and Rf = range of f, be invertible, –1 → –1 ∈ ∈ then f : Rf Df is given by f (y) = x iff y = f (x) for all x Df and y Rf . Thus, the roles of x and y are just interchanged during the transition from f to f –1 ∈ In fact, graph of f ={(x, y) : y = f (x), for all x Df } and –1 –1 ∈ graph of f ={(y, x) : x = f (y), for all y Rf } ∈ ={(y, x) : y = f (x), for all x Df }.