W65C265S 16–Bit Microcontroller
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Computer Architectures an Overview
Computer Architectures An Overview PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 25 Feb 2012 22:35:32 UTC Contents Articles Microarchitecture 1 x86 7 PowerPC 23 IBM POWER 33 MIPS architecture 39 SPARC 57 ARM architecture 65 DEC Alpha 80 AlphaStation 92 AlphaServer 95 Very long instruction word 103 Instruction-level parallelism 107 Explicitly parallel instruction computing 108 References Article Sources and Contributors 111 Image Sources, Licenses and Contributors 113 Article Licenses License 114 Microarchitecture 1 Microarchitecture In computer engineering, microarchitecture (sometimes abbreviated to µarch or uarch), also called computer organization, is the way a given instruction set architecture (ISA) is implemented on a processor. A given ISA may be implemented with different microarchitectures.[1] Implementations might vary due to different goals of a given design or due to shifts in technology.[2] Computer architecture is the combination of microarchitecture and instruction set design. Relation to instruction set architecture The ISA is roughly the same as the programming model of a processor as seen by an assembly language programmer or compiler writer. The ISA includes the execution model, processor registers, address and data formats among other things. The Intel Core microarchitecture microarchitecture includes the constituent parts of the processor and how these interconnect and interoperate to implement the ISA. The microarchitecture of a machine is usually represented as (more or less detailed) diagrams that describe the interconnections of the various microarchitectural elements of the machine, which may be everything from single gates and registers, to complete arithmetic logic units (ALU)s and even larger elements. -

Programming the 65816
Programming the 65816 Including the 6502, 65C02 and 65802 Distributed and published under COPYRIGHT LICENSE AND PUBLISHING AGREEMENT with Authors David Eyes and Ron Lichty EFFECTIVE APRIL 28, 1992 Copyright © 2007 by The Western Design Center, Inc. 2166 E. Brown Rd. Mesa, AZ 85213 480-962-4545 (p) 480-835-6442 (f) www.westerndesigncenter.com The Western Design Center Table of Contents 1) Chapter One .......................................................................................................... 12 Basic Assembly Language Programming Concepts..................................................................................12 Binary Numbers.................................................................................................................................................... 12 Grouping Bits into Bytes....................................................................................................................................... 13 Hexadecimal Representation of Binary................................................................................................................ 14 The ACSII Character Set ..................................................................................................................................... 15 Boolean Logic........................................................................................................................................................ 16 Logical And....................................................................................................................................................... -
History of Micro-Computers
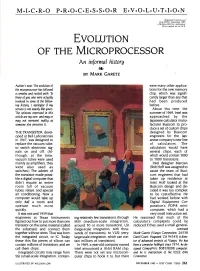
M•I•C•R•O P•R•O•C•E•S•S•O•R E•V•O•L•U•T•I.O•N Reprinted by permission from BYTE, September 1985.. a McGraw-Hill Inc. publication. Prices quoted are in US S. EVOLUTION OF THE MICROPROCESSOR An informal history BY MARK GARETZ Author's note: The evolution of were many other applica- the microprocessor has followed tions for the new memory a complex and twisted path. To chip, which was signifi- those of you who were actually cantly larger than any that involved in some of the follow- had been produced ing history, 1 apologize if my before. version is not exactly like yours. About this time, the The opinions expressed in this summer of 1969, Intel was article are my own and may or approached by the may not represent reality as Japanese calculator manu- someone else perceives it. facturer Busicom to pro- duce a set of custom chips THE TRANSISTOR, devel- designed by Busicom oped at Bell Laboratories engineers for the Jap- in 1947, was designed to anese company's new line replace the vacuum tube, of calculators. The to switch electronic sig- calculators would have nals on and off. (Al- several chips, each of though, at the time, which would contain 3000 vacuum tubes were used to 5000 transistors. mainly as amplifiers, they Intel designer Marcian were also used as (led) Hoff was assigned to switches.) The advent of assist the team of Busi- the transistor made possi- com engineers that had ble a digital computer that taken up residence at didn't require an entire Intel. -
MOS Technology 6502
MOS Technology 6502 Le MOS Technology 6502 est un microprocesseur 8 bits conçu par MOS Technology en 1975. Quand il fut présenté, il était de loin le processeur le plus économique sur le marché, à environ 1/6 du prix, concurrençant de plus grandes MOS Technology 6502 compagnies telles que Motorola ou Intel. Il était néanmoins plus rapide que la plupart d'entre eux, et avec le Zilog Z80, brilla dans une série de projets d'ordinateurs qui furent par la suite la source de la révolution d'ordinateurs personnels des années 1980. La production du 6502 était à l'origine concédée par MOS Technology à Rockwell et Synertek puis plus tard à d'autres compagnies ; il est encore fabriqué en 2014 pour équiper des systèmes embarqués. Sommaire 1 Histoire et utilisation 2 Description 3 Des caractéristiques floues 4 Remarques sur le 6502 5 Références 6 Liens externes (en français) Schema d'un circuit MOS 6502. 7 Liens externes (en anglais) Caractéristiques Production 1975 Histoire et utilisation Fabricant MOS Technology Fréquence 1 MHz à 1,55 MHz Le 6502 a été conçu principalement par l'équipe qui avait développé le Motorola 6800. Après avoir quitté Motorola en Finesse de 8000 nm à 8 000 nm bloc, ses ingénieurs ont rapidement sorti le 6501, d'une conception complètement nouvelle mais dont le brochage gravure restait néanmoins compatible avec le 6800. Motorola entama des poursuites judiciaires immédiatement, et bien qu'aujourd'hui l'affaire aurait été déboutée, les dommages que MOS encourut furent suffisants pour que la société Cœur MOS Tech 6502 accepte de cesser de produire le 6501. -

W65C134S 8-Bit Microcontroller
October 15, 2019 W65C134S Datasheet W65C134S 8-bit Microcontroller WDC reserves the right to make changes at any time without notice in order to improve design and supply the best possible product. Information contained herein is provided gratuitously and without liability, to any user. Reasonable efforts have been made to verify the accuracy of the information but no guarantee whatsoever is given as to the accuracy or as to its applicability to particular uses. In every instance, it must be the responsibility of the user to determine the suitability of the products for each application. WDC products are not authorized for use as critical components in life support devices or systems. Nothing contained herein shall be construed as a recommendation to use any product in violation of existing patents or other rights of third parties. The sale of any WDC product is subject to all WDC Terms and Conditions of Sales and Sales Policies, copies of which are available upon request. Copyright (C) 1981-2019 by The Western Design Center, Inc. All rights reserved, including the right of reproduction in whole or in part in any form. www.WDC65xx.com 1 October 15, 2019 W65C134S Datasheet TABLE OF CONTENTS DOCUMENT REVISION HISTORY .................................................................................................................................. 5 1 INTRODUCTION ............................................................................................................................................................. 6 1.1 KEY FEATURES -

Table of Contents
INTRODUCTION TO VLSI DESIGN WITH SYSTEM ON CHIP DESIGN REUSE: A TUTORIAL FOR STUDENTS by Frank J. Ventura Jr. An Applied Project in Partial Fulfillment of the Requirements for the Degree Master of Science in Technology ARIZONA STATE UNIVERSITY EAST March 2005 INTRODUCTION TO VLSI DESIGN WITH SYSTEM ON CHIP DESIGN REUSE: A TUTORIAL FOR STUDENTS by Frank J. Ventura Jr. has been approved March, 2005 APPROVED: ,Chair Dr. Narciso F. Macia Dr. Albert L. McHenry Dr. Don Cottrell Supervisory Committee ACCEPTED: Dr. Lakshmi V. Munukutla Department Chair ii ABSTRACT Due to the absence of a formal class in VLSI design at ASU East, the need arose for a hands-on tutorial that would introduce the students to VLSI design, emphasizing System-on-a-Chip design and the concept of design reuse. When UET 513 – Introduction to VLSI Design was taught at ASU East, The Western Design Center Inc. (WDC) supported this class by donating industry used software tools and their microprocessor Intellectual Property (IP) for the class to use in learning the concepts of VLSI Design. WDC continues to support the students at ASU East that are interested in VLSI design, by offering internships to give the students experience in the VLSI design flow. Students interested in using this tutorial will be able to work at WDC’s office and have access to the software tools and technology. The students will be following the design flow as used by WDC. The students will be exposed to the following design tools: ViewDraw for schematic entry, Silos for Verilog HDL simulation, ICED for laying out an IC, and PSPICE for electrical characterization. -

“Bill” Mensch, Jr
........ Computer • History Museum Oral History of William David “Bill” Mensch, Jr. Interviewed by: Stephen Diamond Recorded: November 10, 2014 Mountain View, California CHM Reference number: X7273.2015 © 2014 Computer History Museum Oral History of William David “Bill” Mensch, Jr. Stephen Diamond: OK, it's November 10, 2014, here at the Computer History Museum. I'm Steve Diamond, and we're doing in oral history of Bill Mensch. Thanks, Bill, for joining us. William David “Bill” Mensch: Well, thank you. Diamond: We'll be talking about a variety of subjects and your perceptions of what's happened in the past and, perhaps, where things are going in the future. Why don't we start out by talking about your youth and your education, and then we'll follow that up into your transition into the semiconductor world? Mensch: All right. Well, thanks for inviting me. It's an honor to be here right now, and I will enjoy telling you what I know about my life, how I got here. And we'll start, then, with my growing up on a farm in Pennsylvania, Bucks County, about 35 miles north of Philadelphia, very rural. The dairy farm had like 26 head of cattle, and I was a middle child of eight children I grew up with. And as a result, I got to explore because it was more fun being outside of the house rather than inside the house. When I was probably about 10 years old, we may have gotten a TV. We had a radio, liked to listen to the Lone Ranger. -

W65C265S 8/16-Bit Microcontroller
May 8, 2020 W65C265S Datasheet W65C265S 8/16-bit Microcontroller WDC reserves the right to make changes at any time without notice in order to improve design and supply the best possible product. Information contained herein is provided gratuitously and without liability, to any user. Reasonable efforts have been made to verify the accuracy of the information but no guarantee whatsoever is given as to the accuracy or as to its applicability to particular uses. In every instance, it must be the responsibility of the user to determine the suitability of the products for each application. WDC products are not authorized for use as critical components in life support devices or systems. Nothing contained herein shall be construed as a recommendation to use any product in violation of existing patents or other rights of third parties. The sale of any WDC product is subject to all WDC Terms and Conditions of Sales and Sales Policies, copies of which are available upon request. Copyright (C) 1981-2020 The Western Design Center, Inc. All rights reserved, including the right of reproduction in whole or in part in any form. www.WDC65xx.com 1 May 8, 2020 W65C265S Datasheet TABLE OF CONTENTS DOCUMENT REVISION HISTORY .......................................................................................................... 5 1 INTRODUCTION ..................................................................................................................................... 6 1.1 KEY FEATURES OF THE W65C265S .......................................................................................... -
Wdc Developer Guide
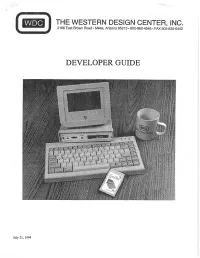
WDC THE WESTERN DESIGN CENTER, INC. 2166 East Brown Road • Mesa, Arizona 85213 • 602-962-4545 • FAX 602-835-6442 DEVELOPER GUIDE July 21, 1994 PAGE 1 BLANK THE WESTERN DESIGN CENTER, INC. 2166 East Brown Road • Mesa, Arizona 85213 • 602-962-4545 • FAX 602-835-6442 Evaluation and Developer System Mensch ^ Computer^ The Western Design Center, Inc. , (WDC) founded in 1978 by William D. Mensch Jr. has developed a rechargable battery powered computer. The Mensch Computer™ is based on the W65C265S, a 16-bit microcomputer which has a W65C816S as its core. The W65C816 is the CPU for the Apple Ilgs™, Super Nintendo™ and Digital Book System™ by Franklin Electronic Publishing. The W65C265S also has four serial ports to interface with a printer, keyboard, modem and PC. Two MenschCard (PCMCIA memory card) slots provide user memory upgrade for application software and data storage. The 240X128 LCD 40 column by 16 line monochrome display is ideal for telecommunications, directory, dictionary, digital books, control, game and hobby uses. The keyboard is full-sized for easy data entry. A Sega controller interface can be used for controlling applications and selecting from menus. This computer is also ideal for evaluating the W65C265S and W65C134S. The CPU module uses the W65C265S. The keyboard module uses the W65C134S as a low power keyboard controller, interfaced through the UART using it's low power CMOS interface. July 21, 1994 DEVELOPER GUIDE, .Page 2 of 11 WDC THE WESTERN DESIGN CENTER, INC. 2166 East Brown Road • Mesa, Arizona 85213 • 602-962-4545 -

Computers and Microprocessors
Computers and Microprocessors Lecture 35 PHYS3360/AEP3630 1 Contents • Input/output standards • Microprocessor evolution • Computer languages & operating systems • Information encryption/decryption 2 Input/Output Ports • USB (universal serial bus) – intelligent high-speed connection to devices – up to 480 Mbit/s (USB 2.0 Hi-Speed) – USB hub connects multiple devices – enumeration: computer queries devices – supports hot swapping, hot plugging • Parallel – short cable, Enhanced PP up to 2 Mbit/s – common for printers, simpler devices – bidirectional, parallel data transfer (IEEE 1284) – Intel 8255 controller chip 3 Input/Output Ports (2) • Serial – one bit at a time – RS-232 (recommended standard 232) serial port – used with long cables (not longer than ~15 m OK) – low speeds (up to 115 kbit/s) – still widely used to interface instruments – additional standards available: • E.g. RS-422/485 differential signals for better noise immunity, can support speeds in access of 10 Mbit/s (becomes cable- length dependent) 4 Input/Output Ports (3) • IEEE-488 (GPIB) – Has been around for 30 years, many instruments are equipped with it – Allows daisy-chaining up to 15 devices – Updated versions have speeds up to 10Mbit/s 5 Microprocessor Evolution • Generally characterized by the “word” size (registers and data bus) – 8-bit, 16-bit, 32-bit, 64-bit – addressable memory related to the word size • Intel 8080 (1974) – 8-bit, first truly usable µ−processor (40 DIP) – seven 8-bit registers (six of which can be combined as three 16-bit registers) – 6K transistors, -

A Decade of Semiconductor Companies—1988 Edition to Keep Clients Informed of These New and Emerging Companies
1988 y DataQuest Do Not Remove A. Decade of Semiconductor Companies 1988 Edition Components Division TABLE OF CONTENTS Page I. Introduction 1 II. Venture Capital 11 III. Strategic Alliances 15 IV. Product Analysis 56 Emerging Technology Companies 56 Analog ICs 56 ASICs 58 Digital Signal Processing 59 Discrete Semiconductors 60 Gallium Arsenide 60 Memory 62 Microcomponents 64 Optoelectronics 65 Telecommunication ICs 65 Other Products 66 Bubble Memory 67 V. Company Profiles (139) 69 A&D Co., Ltd. 69 Acrian Inc. 71 ACTEL Corporation 74 Acumos, Inc. 77 Adaptec, Inc. 79 Advanced Linear Devices, Inc. 84 Advanced Microelectronic Products, Inc. 87 Advanced Power Technology, Inc. 89 Alliance Semiconductor 92 Altera Corporation 94 ANADIGICS, Inc. 100 Applied Micro Circuits Corporation 103 Asahi Kasei Microsystems Co., Ltd. 108 Aspen Semiconductor Corporation 111 ATMEL Corporation 113 Austek Microsystems Pty. Ltd. 116 Barvon Research, Inc. 119 Bipolar Integrated Technology 122 Brooktree Corporation 126 California Devices, Ihc. 131 California Micro Devices Corporation 135 Calmos Systems, Inc. 140 © 1988 Dataquest Incorporated June TABLE OF CONTENTS (Continued) Pagg Company Profiles (Continued) Calogic Corporation 144 Catalyst Semiconductor, Inc. 146 Celeritek, Inc. ISO Chartered Semiconductor Pte Ltd. 153 Chips and Technologies, Inc. 155 Cirrus Logic, Inc. 162 Conductus Inc. 166 Cree Research Inc. 167 Crystal Semiconductor Corporation 169 Custom Arrays Corporation 174 Custom Silicon Inc. 177 Cypress Semiconductor Corporation 181 Dallas Semiconductor Corporation 188 Dolphin Integration SA 194 Elantec, Inc. 196 Electronic Technology Corporation 200 Epitaxx Inc. 202 European Silicon Structures 205 Exel Microelectronics Inc. 209 G-2 Incorporated 212 GAIN Electronics 215 Gazelle Microcircuits, Inc. 218 Genesis Microchip Inc. -
Retromagazine 07 Eng.Pdf
CONTENTS "Seeing" retrogames through their sounds ◊ The I.C.L. One-Per-Desk computer Pag. 3 ◊ Evercade - Blaze Entertainment Everyone tells me that I always try to "see" the beauty of things Pag. 4 and I turn the difficulties I encounter into my strengths. ◊ PC Engine - The small giant from the Pag. 6 Land of Rising Sun And now I'm here, 40 years old, playing, having become blind, Pag. 8 with my head full of 8-bit memories. For once, a strength of mine ◊ The MOS 6502 CPU that doesn't come out of a difficulty but out of a lot of good ◊ Structuring old BASIC dialects with For- Pag. 12 memories. Next loops ◊ BASIC in a nutshell: waves on LM80C Pag. 14 I have always been tied to the sounds of those times, those and MSX-1 sounds that today are the only thing that reminds me the ◊ Grapheur 1.0 - Doing graphs with the Pag. 16 emotions of my teenage years, when the only thought was to Amstrad CPC come home from school to sit down in front of my MSX and later ◊ SpeedCalc 2019 - Like having Excel on a my Amiga 500 Plus and try out new games and software. Pag. 18 C64? Well, almost... How nice to remember the sound of the MSX cassette recorder ◊ Simulating PLOT X,Y in C64 bitmap Pag. 20 mode or Amiga's floppy drive head. ◊ May the FORTH be with us - part 3 Pag. 22 And what about this pandemic period, the first months of forced ◊ Basic 10-Liner Contest 2021 Pag.