VORTEX Spring Final Review
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Summer Store Class 2021 Open Water I
VISIT OUR WEBSITE FOR EDUCATIONAL OPPORTUNITES AND DIVE TRIP INFORMATION! www.adventuresportsauburn.com 334 - 887 - 8005 Follow us on Facebook and Instagram @ Adventure Sports Scuba Summer Store Class 2021 Open Water I Orientation is Thursday, May 27 at 6:00 pm Class Begins Tuesday, June 1 at 5:30 pm This is an entry level course designed to learn about scuba diving and earn an Open Water certification or Open Water Plus. *Both give you a lifetime SCUBA certification.* Open Water: SSI Open Water Diver certification cards are recognized throughout the world. They entitle you to dive for a lifetime with other certified divers. It also enables you to purchase/rent equipment and obtain air fills anywhere you choose to dive. Course Fee is $295 plus gear and certification trips. Open Water Plus: With this package you will earn the SSI Open Water Diver and SSI Enriched Air Nitrox Specialty certifications. Enriched Air Nitrox is a blend of gas that allows for longer bottom times, shorter surface intervals, and is thought to cause less fatigue than normal compressed air. Course Fee is $345 plus gear and certification trips. EQUIPMENT: Each student must provide all their own personal gear, including mask, fins, snorkel, booties, weight belt, and weight. All gear purchased from us can be exchanged for full trade in value at any time during the class if you have any problems with quality or fit. Purchasing quality gear is crucial to your success and enjoyment of scuba diving! Personal gear purchases from Adventure Sports will be around $250-350. We offer a 10% discount on personal gear to our students. -

DAY TRIP Submerge Yourself
DAY TRIP submerge yourself magine water of such astonishing treasure: crystalline springs fed by clarity that fish seem to hover in underground aquifers. Springs so mid air, suspended motionless pure that the water is now bottled for against a backdrop of blue skies and drinking purposes. But what makes shade trees. Then visualize a cavern these springs so unique is not only the 50 feet underwater, where sunbeams clarity of the water but the fact that they dance over the cave floor and visitors team with life. The springs play host float motionless in liquid space; a world to bream, gar, bluegills, catfish, eels, where gravity ceases to hold sway and the and bass. And for snorkelers, SCUBA temperature never varies by as much as a divers and kayakers, the abundance of single degree year round. Now, imagine life in the springs offers the opportunity yourself immersed in the fluid embrace to swim and dive in a world of of this marvelous world. Sounds like the unparalleled beauty. It’s a chance to product of an escapist fantasy, you say? experience one of Florida’s greatest Could be. But while the effects may be natural wonders. surreal, these places do exist outside the Florida has the greatest concentration imagination. And they’re only hours away of freshwater springs in the world. In in nearby Florida. fact, there are 33 “first-magnitude” Renowned as a dive mecca, Florida is springs alone (discharging at least 100 famous for its endless beaches and clear cubic feet of water per second). And waters. When most people think of there are hundreds of lesser springs SCUBA diving or snorkeling in Florida, that provide endless possibilities for they think in terms of saltwater. -

Volume 14 Number 1, February 1987
'.:t ,. , ~, UNDERWAT~R VOLUME FOURTEEN, NUMBER ONE, January 13, 1987 SPElEOlOGY· The Malheur lava cave system in Oregon. Photos by Karl Anderson. See story page 5. "-:::;""'!+/! 2 UNDERWATER SPELEOLOGY Vol. 14, No. 1 THE CAVE DIVING SECTION OF !'!!:!Q~!:!:!e!.~!: ~::1.1::!~1~Q1Q.9.!i is the off'icial r.ewsletter THE NATIONAL SPELEOLOGICAL SOCIETY, INC. of' the Cave Diving Section of' the National Spele P.O. BOX 95121, BRANFORD, FL 321211218-095121 ological 'Sc.ciety, lr.c. Sect ic.r. r~embership, whic(""" - BOARD OF DIRECTORS - ir.cludes subscriptior. to the r.ewsletter, is e.pe\, to all members in good standing of' the NSS a~ $5.1210 per year. Subser i pt i Or.S f'or r.or.;--rn.erobers are $1121.121121 per year. Membership/subscription i r.fc.rrn.at ior., appl icat iems, ar.d stat us may be STEVE ORMEROID Chairman: obtair.ed by writ ing to the Secretary-Treasurer 629 West 4th St. c/o the sect ion's peY'roar.ent address: Marysville, OH 431214121 (513) 642-7775 Jc.e Prosser, Sec./Treas. NSS Cave Di vi r.g Sect ior. Vice-Chairman: JEFF BOZANIC P.O. Bo)! 950 P.O. 80H 49121462 Brar.f'e.rd, FL 321211218-0950 Key Biscayne, FL 33149-0462 (31215) 666-121748 All eurY'er.t r.ews items, reports, art ieles, photo graphs, negat i ves, sl ides, carte.ons, or other submissions for the r.ewsletter should be sent or Secretary JOE PROSSER Treasurer: 741210 N.W. 55th St. telephor.ed ir. -

11/30/98 Health and Safety Plan
KAISER ENVIRONMENT AND FACILITIES MANAGEMENT GROUP IGF Kaiser Engineers, Inc. Gateway View Plaza 1600 West Carson St. Pittsburgh, PA 152 19 412/497-2000 Fax 412/497-2212 http://www.icfkaiser.com November 30, 1998 Mr. John Osolin Geologist / Project Manager US EPA - Region U 290 Broadway -19th Floor New York, NY 10007-1866 Subject: Response to Comments - Pulverizing Services Site Health and Safety Plan Pulverizing Services Site, Moorestown, New Jersey Dear Mr. Osolin: The following responses are provided to comments received from you on November 19, 1998. In addition, an addendum to the Pulverizing Services Site Health and Safety Plan dated, October 29, 1998, is attached to add comment information to the Health and Safety Plan. COMMENT 1; Does OSC agree with sampling in Level D? Response: The following equation was used to calculate real-time action levels for Level D and to upgrade to Level C. This equation conservatively assumes all aerosol detected by real-time instrumentation are contaminated. ( 106 me / kg) (PEL in me / m3) (Soil concentration in mg/ kg) COMMENT 2; No separate spill containment program. Response: Section 9.8 of the HASP has been added to provide the following information: SPILLS If a spill of hazardous material occurs, the following actions will be taken: Notify the field operations leader immediately. Take immediate measures to control and contain the spill within site boundaries. Isolate the hazardous area, and keep unnecessary personnel away. • Stay upwind and keep out of low-lying areas. Allow no flares, smoking, or flames in hazard area. For liquids, keep combustibles away from the spilled materials. -

C:\Attachments\NSS Cart Salon Synopsis.Wpd
A 27-YEAR HISTORY OF THE CARTOGRAPHIC SALON OF THE NATIONAL SPELEOLOGICAL SOCIETY (1978 to 2004) George Dasher July 2004 A 27-YEAR HISTORY OF THE CARTOGRAPHIC SALON OF THE NATIONAL SPELEOLOGICAL SOCIETY (1978 to 2004) George Dasher Salon Coordinator July 2004 George R. Dasher: 63 Valley Drive, Elkview, West Virginia; [email protected] National Speleological Society: 2813 Cave Avenue, Huntsville, Alabama [email protected]; www.caves.org Table of Contents page The NSS Cartographic Salon ............................................ 3 General Information ................................................... 4 Cartographic Salon Synopsis ............................................ 5 Organization and Judging Criteria ........................................ 7 Judging Form ....................................................... 12 The Salon Requirements at Convention ................................... 13 The Salon Chairperson’s Responsibilities .................................. 14 Annual Reports: 1978 ................... 17 1996 ................... 53 1979 ................... 19 1997 ................... 55 1980 ................... 20 1998 ................... 57 1981 ................... 21 1999 ................... 59 1982 ................... 23 2000 ................... 61 1983 ................... 24 2001 ................... 63 1984 ................... 25 2002 ................... 65 1985 ................... 27 2003 ................... 66 1986 ................... 29 2004 ................... 68 1987 ................... 31 1988 ................... 33 -
Local Teen Earns Eagle Scout Rank
JAMES J. OSTROMECKY, D.D.S. NEW PATIENTS ALWAYS Patient Focused, Family Operated Dentistry WELCOMED! Comprehensive Examinations and Treatment Planning Lower Dose Digital Imaging • Enhanced Oral Cancer Screening Technology Patient Education • Coordination of Services with Specialists • Patient Liaison Services We welcome Altus, BC/BS, Cigna, Delta, Guardian, and MetLife. For an appointment, call 508-885-6366 or visit our website at www.ostromecky.com HOURS: Payment Plans Available Through Mon, Tues, Thurs 7am-5pm • Wed 7am-4pm CareCredit and Retriever Free by request to residents of East Brookfield, West Brookfield, North Brookfield, Brookfield, Leicester and Spencer SEND YOUR NEWS AND PICS TO [email protected] Friday, April 19, 2019 Local teen earns Forum tackles state Eagle Scout rank school funding issues BY KEVIN FLANDERS ter school tuitions. Officials STAFF WRITER stressed the importance of strong communications at all SPENCER – Residents levels of the district and within learned about state level school both communities. finance operations during a public forum last week. “The meeting emphasized the need for us to work togeth- On April 9, Spencer-East er at the local level now more Brookfield Regional School than ever, as state revenues are Committee members teamed fluid and always changing,” up with selectmen and Finance Haughey added. Committee members in both towns to host the joint forum. For officials in both towns, The goal was to inform resi- it was helpful to provide elect- dents about the often enigmatic ed leaders and residents alike inner workings of public educa- with an opportunity to learn tion systems and school finance more about state level opera- operations at the state level. -
DRAFT 8/8/2013 Updates at Chapter 59 -- Three Tales of Two St
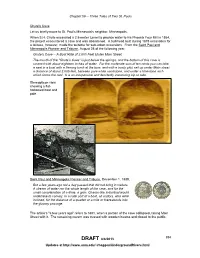
Chapter 59 -- Three Tales of Two St. Pauls Chute's Cave Let us briefly move to St. Paul's Minnesota's neighbor, Minneapolis. When S.H. Chute excavated a 2.5-meter tunnel to provide water to his Phoenix Four Mill in 1864, the project encountered a cave and was abandoned. A bulkhead built during 1875 excavation for a tailrace, however, made the suitable for sub-urban excursions. From the Saint Paul and Minneapolis Pioneer and Tribune, August 26 of the following year, Chute's Cave -- A Boat Ride of 2,000 Feet Under Main Street. The mouth of the "Chute's Cave" is just below the springs, and the bottom of this cave is covered with about eighteen inches of water. For the moderate sum of ten cents you can take a seat in a boat with a flaming torch at the bow, and with a trusty pilot sail up under Main street a distance of about 2,000 feet, between pure white sandstone, and under a limestone arch which forms the roof. It is an inexpensive and decidedly interesting trip to take. Stereopticon view showing a flat- bottomed boat and pole. Saint Paul and Minneapolis Pioneer and Tribune, December 1, 1889, But a few years ago not a day passed that did not bring in visitors. A stream of water ran the whole length of the cave, and for the small consideration of a dime, a grim, Charon-like individual would undertake to convey, in a rude sort of a boat, all visitors, who were inclined, for the distance of a quarter or a mile or thereabouts into the gloomy passage. -

Spring Store Class 2021 Open Water I
VISIT OUR WEBSITE FOR EDUCATIONAL OPPORTUNITES AND DIVE TRIP INFORMATION! www.adventuresportsauburn.com 334 - 887 - 8005 Follow us on Facebook and Instagram @ Adventure Sports Scuba Spring Store Class 2021 Open Water I Orientation is Thursday, January 21 at 6:00 pm Class Begins Sunday, January 24 at 5:30 pm This is an entry level course designed to learn about scuba diving and earn an Open Water certification or Open Water Plus. *Both give you a lifetime SCUBA certification.* Open Water: SSI Open Water Diver certification cards are recognized throughout the world. They entitle you to dive for a lifetime with other certified divers. It also enables you to purchase/rent equipment and obtain air fills anywhere you choose to dive. Course Fee is $295 plus gear and certification trips. Open Water Plus: With this package you will earn the SSI Open Water Diver and SSI Enriched Air Nitrox Specialty certifications. Enriched Air Nitrox is a blend of gas that allows for longer bottom times, shorter surface intervals, and is thought to cause less fatigue than normal compressed air. Course Fee is $345 plus gear and certification trips. EQUIPMENT: Each student must provide all their own personal gear, including mask, fins, snorkel, booties, weight belt, and weight. All gear purchased from us can be exchanged for full trade in value at any time during the class if you have any problems with quality or fit. Purchasing quality gear is crucial to your success and enjoyment of scuba diving! Personal gear purchases from Adventure Sports will be around $300-400. We offer a 10% discount on personal gear to our students. -

Checkout Dive Information Required Equipment Plans Are Subject to Change
Checkout Dive Information Required Equipment Plans are subject to change. It is your responsibility to stay current. Each diver must have: Mask, snorkel and adjustable fins Wetsuit boots Reserving Your Spot and Getting Ready Logbook with dive tables As Soon as Possible: Student divers must reserve their spot by paying the Dive knife $ Dive watch or dive computer minimum deposit of 100. The trip cost covers instructor fees, diving expenses Gloves and your internationally recognized lifetime Open Water Scuba Diver certifica- Sufficient lead tion card. Certified divers go on a space available basis and pay a lesser amount. Whistle BC* Rental Equipment: You are responsible for trying on, reserving, picking up, Regulator with console* paying for, transporting, keeping track of, cleaning and returning all equipment Alternate air source* needed, including two tanks. Pick up your rental equipment at Harry’s Dive Two full tanks each day* Shop on Friday. We offer the complete weekend rental package, including fills, Cold water wetsuit* to our entry-level students for $100 plus tax. *Denotes items available for rent from Harry’s Dive Shop Checking Weight: It is also your responsibility, as a “soon to be certified” and You may use only equipment that was pur- responsible scuba diver, to get in the pool (bring a towel) with the rental wet- chased or rented from Harry’s Dive Shop suit to find out how much additional lead your cold water wetsuit requires. You until you are a certified diver. When renting tanks* from Harry’s Dive Shop, you may should be able to sit lightly on the shallow end bottom with an exhaled breath. -

An Analysis of Marine Propulsors and Their Applications
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1967-09 An analysis of marine propulsors and their applications Carr, Donald Stephen Monterey, California. Naval Postgraduate School http://hdl.handle.net/10945/45128 NPS ARCHIVE 1967 CARR, D. AM ANALYSIS OF MARINE PROPULSORS THEIR APPLICATIONS DONALD STEPHEN CARR cUSH -'< mm m i u • I» AN ANALYSIS OF MARINE PROPULSORS AND THEIR APPLICATIONS by Donald Stephen Carr Major, United States Marine Corps B. S., College of the Holy Cross, 1955 Submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE IN AERONAUTICAL ENGINEERING from the NAVAL POSTGRADUATE SCHOOL September 1967 —' ABSTRACT Increased interest on the part of the United States in the exploration and exploitation of the ocean environment has led to the assignment of diverse missions in this field to the military. Development of numerous vehicles and weapons systems and the propulsion units to propel them is required to accomplish these missions. In this paper, a general classification of propulsors is established and important performance parameters are defined. A variety of marine thrust devices is described and analyzed in detail, and a qualitative comparison of performance is made. General guidelines are offered for mating propulsors and vehicles for appropriate applications and particular mission requirements. The importance of drag reduction is recognized and various techniques are discussed in an appendix. Since this paper is intended to serve as a compendium on marine propulsors, an extensive bibliography has been incorporated. SCHOOL NMAL POSTGRADUATE TnTEREY, CALIF. 93940 TABLE OF CONTENTS Page LIST OF TABLES 5 LIST OF FIGURES 7 1. -

Checkout Dive Information Required Equipment Plans Are Subject to Change
Checkout Dive Information Required Equipment Plans are subject to change. It is your responsibility to stay current. Each diver must have: Mask, snorkel and adjustable fins Wetsuit boots Reserving Your Spot and Getting Ready Logbook with dive tables As Soon as Possible: Student divers must reserve their spot by paying the Dive knife $ Dive watch or dive computer minimum deposit of 100. The trip cost covers instructor fees, diving expenses Gloves and your internationally recognized lifetime Open Water Scuba Diver certifica- Sufficient lead tion card. Certified divers go on a space available basis and pay a lesser amount. Whistle BC* Rental Equipment: You are responsible for trying on, reserving, picking up, Regulator with console* paying for, transporting, keeping track of, cleaning and returning all equipment Alternate air source* needed, including two tanks. Pick up your rental equipment at Harry’s Dive Two full tanks each day* Shop on Friday. We offer the complete weekend rental package, including fills, Cold water wetsuit* to our entry-level students for $100 plus tax. *Denotes items available for rent from Harry’s Dive Shop Checking Weight: It is also your responsibility, as a “soon to be certified” and You may use only equipment that was pur- responsible scuba diver, to get in the pool (bring a towel) with the rental wet- chased or rented from Harry’s Dive Shop suit to find out how much additional lead your cold water wetsuit requires. You until you are a certified diver. When renting tanks* from Harry’s Dive Shop, you may should be able to sit lightly on the shallow end bottom with an exhaled breath. -
View Digital Guide
Washington JacksonGulf Bay Holmes Calhoun Liberty Walton Gadsden Franklin Welcome Explore Northwest Florida invites you to move at the speed of nature. The landscape in our section of the Sunshine State is filled with treasures in natural wonders, wildlife, historical interests, mini-marvels and outdoor activities. The gorgeous parks are a hot spot for camping or day trips. Fresh and salty water offer amazing activities. The waterways flow in different currents ranging from fresh crystal clear springs creating lakes and rivers, to salty seas washing ashore. It is all here to work and play in. The charming small towns dotted throughout the region are the essence of southern charm and hospitality. The Spanish moss in oak trees drapes over canopy roads, perfect for afternoon drives. Admiring sunsets is required viewing. Fresh local eateries, shopping and discovering marvels along the way entices visitors to continue the journey. This is a piece of our paradise where you Choose Your Adventure—water activities, parks, shopping, outdoor recreation, taking in local history, or relaxing on the beach. The participating counties in Northwest Florida that make up the rural tourism group, range from Gadsden, Gulf, Liberty and Franklin to the east, Jackson, Calhoun, Bay and Washington center the region, while Walton, Holmes border the west. The Apalachicola and Choctawhatchee Rivers define the region’s boundaries. Telling our story of our wonders is the mission. It is time to Explore Northwest Florida where Old Florida blends with today’s world. Explore No a rt id Contentshwest Flor 4 Springs 6 Inland State Parks 10 Coastal State Parks 14 Beaches 16 Trails 18 Paddling 20 Charming Towns 22 Map 24 Wildlife 26 Diving 28 Shores 30 History & Culture 32 Scenic Drives 34 Events 35 Eateries 36 Famous NW Floridians 38 Coastal Camp Sites 40 Inland Camp Sites 42 Participating Counties 43 Visitors Centers Contact Us [email protected] Website explorenwflorida.com Explore Northwest Florida regional visitors guide is published for Explore Northwest Florida organization.