Differential Geometry - Solution 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

DIFFERENTIAL GEOMETRY Contents 1. Introduction 2 2. Differentiation 3
DIFFERENTIAL GEOMETRY FINNUR LARUSSON´ Lecture notes for an honours course at the University of Adelaide Contents 1. Introduction 2 2. Differentiation 3 2.1. Review of the basics 3 2.2. The inverse function theorem 4 3. Smooth manifolds 7 3.1. Charts and atlases 7 3.2. Submanifolds and embeddings 8 3.3. Partitions of unity and Whitney’s embedding theorem 10 4. Tangent spaces 11 4.1. Germs, derivations, and equivalence classes of paths 11 4.2. The derivative of a smooth map 14 5. Differential forms and integration on manifolds 16 5.1. Introduction 16 5.2. A little multilinear algebra 17 5.3. Differential forms and the exterior derivative 18 5.4. Integration of differential forms on oriented manifolds 20 6. Stokes’ theorem 22 6.1. Manifolds with boundary 22 6.2. Statement and proof of Stokes’ theorem 24 6.3. Topological applications of Stokes’ theorem 26 7. Cohomology 28 7.1. De Rham cohomology 28 7.2. Cohomology calculations 30 7.3. Cechˇ cohomology and de Rham’s theorem 34 8. Exercises 36 9. References 42 Last change: 26 September 2008. These notes were originally written in 2007. They have been classroom-tested twice. Address: School of Mathematical Sciences, University of Adelaide, Adelaide SA 5005, Australia. E-mail address: [email protected] Copyright c Finnur L´arusson 2007. 1 1. Introduction The goal of this course is to acquire familiarity with the concept of a smooth manifold. Roughly speaking, a smooth manifold is a space on which we can do calculus. Manifolds arise in various areas of mathematics; they have a rich and deep theory with many applications, for example in physics. -

Lecture 10: Tubular Neighborhood Theorem
LECTURE 10: TUBULAR NEIGHBORHOOD THEOREM 1. Generalized Inverse Function Theorem We will start with Theorem 1.1 (Generalized Inverse Function Theorem, compact version). Let f : M ! N be a smooth map that is one-to-one on a compact submanifold X of M. Moreover, suppose dfx : TxM ! Tf(x)N is a linear diffeomorphism for each x 2 X. Then f maps a neighborhood U of X in M diffeomorphically onto a neighborhood V of f(X) in N. Note that if we take X = fxg, i.e. a one-point set, then is the inverse function theorem we discussed in Lecture 2 and Lecture 6. According to that theorem, one can easily construct neighborhoods U of X and V of f(X) so that f is a local diffeomor- phism from U to V . To get a global diffeomorphism from a local diffeomorphism, we will need the following useful lemma: Lemma 1.2. Suppose f : M ! N is a local diffeomorphism near every x 2 M. If f is invertible, then f is a global diffeomorphism. Proof. We need to show f −1 is smooth. Fix any y = f(x). The smoothness of f −1 at y depends only on the behaviour of f −1 near y. Since f is a diffeomorphism from a −1 neighborhood of x onto a neighborhood of y, f is smooth at y. Proof of Generalized IFT, compact version. According to Lemma 1.2, it is enough to prove that f is one-to-one in a neighborhood of X. We may embed M into RK , and consider the \"-neighborhood" of X in M: X" = fx 2 M j d(x; X) < "g; where d(·; ·) is the Euclidean distance. -

Tangent Spaces
CHAPTER 4 Tangent spaces So far, the fact that we dealt with general manifolds M and not just embedded submanifolds of Euclidean spaces did not pose any serious problem: we could make sense of everything right away, by moving (via charts) to opens inside Euclidean spaces. However, when trying to make sense of "tangent vectors", the situation is quite different. Indeed, already intuitively, when trying to draw a "tangent space" to a manifold M, we are tempted to look at M as part of a bigger (Euclidean) space and draw planes that are "tangent" (in the intuitive sense) to M. The fact that the tangent spaces of M are intrinsic to M and not to the way it sits inside a bigger ambient space is remarkable and may seem counterintuitive at first. And it shows that the notion of tangent vector is indeed of a geometric, intrinsic nature. Given our preconception (due to our intuition), the actual general definition may look a bit abstract. For that reason, we describe several different (but equivalent) approaches to tangent m spaces. Each one of them starts with one intuitive perception of tangent vectors on R , and then proceeds by concentrating on the main properties (to be taken as axioms) of the intuitive perception. However, before proceeding, it is useful to clearly state what we expect: • tangent spaces: for M-manifold, p 2 M, have a vector space TpM. And, of course, m~ for embedded submanifolds M ⊂ R , these tangent spaces should be (canonically) isomorphic to the previously defined tangent spaces TpM. • differentials: for smooths map F : M ! N (between manifolds), p 2 M, have an induced linear map (dF )p : TpM ! TF (p)N; m called the differential of F at p. -

MAT 531: Topology&Geometry, II Spring 2011
MAT 531: Topology&Geometry, II Spring 2011 Solutions to Problem Set 1 Problem 1: Chapter 1, #2 (10pts) Let F be the (standard) differentiable structure on R generated by the one-element collection of ′ charts F0 = {(R, id)}. Let F be the differentiable structure on R generated by the one-element collection of charts ′ 3 F0 ={(R,f)}, where f : R−→R, f(t)= t . Show that F 6=F ′, but the smooth manifolds (R, F) and (R, F ′) are diffeomorphic. ′ ′ (a) We begin by showing that F 6=F . Since id∈F0 ⊂F, it is sufficient to show that id6∈F , i.e. the overlap map id ◦ f −1 : f(R∩R)=R −→ id(R∩R)=R ′ from f ∈F0 to id is not smooth, in the usual (i.e. calculus) sense: id ◦ f −1 R R f id R ∩ R Since f(t)=t3, f −1(s)=s1/3, and id ◦ f −1 : R −→ R, id ◦ f −1(s)= s1/3. This is not a smooth map. (b) Let h : R −→ R be given by h(t)= t1/3. It is immediate that h is a homeomorphism. We will show that the map h:(R, F) −→ (R, F ′) is a diffeomorphism, i.e. the maps h:(R, F) −→ (R, F ′) and h−1 :(R, F ′) −→ (R, F) are smooth. To show that h is smooth, we need to show that it induces smooth maps between the ′ charts in F0 and F0. In this case, there is only one chart in each. So we need to show that the map f ◦ h ◦ id−1 : id h−1(R)∩R =R −→ R is smooth: −1 f ◦ h ◦ id R R id f h (R, F) (R, F ′) Since f ◦ h ◦ id−1(t)= f h(t) = f(t1/3)= t1/3 3 = t, − this map is indeed smooth, and so is h. -
Chapter 9 Partitions of Unity, Covering Maps ~
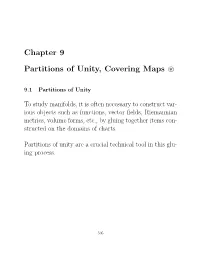
Chapter 9 Partitions of Unity, Covering Maps ~ 9.1 Partitions of Unity To study manifolds, it is often necessary to construct var- ious objects such as functions, vector fields, Riemannian metrics, volume forms, etc., by gluing together items con- structed on the domains of charts. Partitions of unity are a crucial technical tool in this glu- ing process. 505 506 CHAPTER 9. PARTITIONS OF UNITY, COVERING MAPS ~ The first step is to define “bump functions”(alsocalled plateau functions). For any r>0, we denote by B(r) the open ball n 2 2 B(r)= (x1,...,xn) R x + + x <r , { 2 | 1 ··· n } n 2 2 and by B(r)= (x1,...,xn) R x1 + + xn r , its closure. { 2 | ··· } Given a topological space, X,foranyfunction, f : X R,thesupport of f,denotedsuppf,isthe closed set! supp f = x X f(x) =0 . { 2 | 6 } 9.1. PARTITIONS OF UNITY 507 Proposition 9.1. There is a smooth function, b: Rn R, so that ! 1 if x B(1) b(x)= 2 0 if x Rn B(2). ⇢ 2 − See Figures 9.1 and 9.2. 1 0.8 0.6 0.4 0.2 K3 K2 K1 0 1 2 3 Figure 9.1: The graph of b: R R used in Proposition 9.1. ! 508 CHAPTER 9. PARTITIONS OF UNITY, COVERING MAPS ~ > Figure 9.2: The graph of b: R2 R used in Proposition 9.1. ! Proposition 9.1 yields the following useful technical result: 9.1. PARTITIONS OF UNITY 509 Proposition 9.2. Let M be a smooth manifold. -

Differentiable Manifolds
Differentiable Manifolds Lecture Notes for MATH 4033 (Spring 2018) FREDERICK TSZ-HO FONG Hong Kong University of Science and Technology (Version: January 23, 2018) Contents Preface ix Chapter 1. Regular Surfaces 1 1.1. Local Parametrizations 1 1.2. Level Surfaces 8 1.3. Transition Maps 11 1.4. Maps and Functions from Surfaces 14 1.5. Tangent Planes and Tangent Maps 18 Chapter 2. Abstract Manifolds 23 2.1. Smooth Manifolds 23 2.2. Functions and Maps on Manifolds 32 2.3. Tangent Spaces and Tangent Maps 37 2.4. Inverse Function Theorem 45 2.5. Immersions and Submersions 50 2.6. Submanifolds 56 Chapter 3. Tensors and Differential Forms 61 3.1. Cotangent Spaces 61 3.2. Tangent and Cotangent Bundles 64 3.3. Tensor Products 75 3.4. Wedge Products 82 3.5. Exterior Derivatives 89 Chapter 4. Generalized Stokes’ Theorem 109 4.1. Manifolds with Boundary 109 4.2. Orientability 115 4.3. Integrations of Differential Forms 121 4.4. Generalized Stokes’ Theorem 130 Chapter 5. De Rham Cohomology 139 vii viii Contents 5.1. De Rham Cohomology 140 5.2. Deformation Retracts 146 5.3. Mayer-Vietoris Theorem 151 Appendix A. Geometry of Curves 161 A.1. Curvature and Torsion 161 A.2. Fundamental Theorem of Space Curves 172 A.3. Plane Curves 177 Appendix B. Geometry of Surfaces 181 B.1. First Fundamental Form 181 B.2. Second Fundamental Form 187 B.3. Curvatures 197 B.4. Covariant Derivatives 202 B.5. Theorema Egregium 207 B.6. Geodesics and Minimal Surfaces (work in progress) 211 B.7. -

Foliations and Global Inversion
Foliations and Global Inversion Eduardo Cabral Balreira Trinity University Mathematics Department San Antonio, TX 78212 [email protected] http://www.trinity.edu/ebalreir XVI Encontro Brasileiro de Topologia (Brazilian Topology Meeting) - p. 1/47 The Global Inversion Problem Program: Understand injectivity mechanism for a local diffeomorphism f : M → N to be invertible. (M and N are non-compact manifolds) Focus: Use Geometric and Topological methods to understand global invertibility of maps on Rn. Outline: I) Motivation II) Classical results III) Topological Results IV) Recent Progress and Holomorphic Results XVI Encontro Brasileiro de Topologia (Brazilian Topology Meeting) - p. 2/47 The Global Inversion Problem Motivation: 1. Algebraic Geometry. Jacobian Conjecture: Let F : Cn → Cn be a local polynomial biholomorphism, i.e., det(DF(z)) = 1, then F admits a polynomial inverse. • It suffices to show injectivity. • Pinchuck has examples of real polynomial maps with non-zero Jacobian determinant everywhere and not injective Understanding the structure of Aut(Cn), n > 1. XVI Encontro Brasileiro de Topologia (Brazilian Topology Meeting) - p. 3/47 The Global Inversion Problem 2. Dynamical Systems. Markus-Yamabe Conjecture: Let f : Rn → Rnbe a C1 map with Spec(Df ) ⊆ {Re < 0} and f (0)= 0, then 0 is a global attractor of x˙ = f (x). • Solved when n = 2 by Fessler, Glutsiuk, Gutierrez, 95. [Gutierrez] If f : R2 → R2 is a C1 map with Spec(Df ) ∩ [0,∞)= 0/, then f is injective. [Fernandes, Gutierrez, Rabanal, 04] Let f : R2 → R2 be a differentiable map, not necessarily C1. If there is ε > 0 such that Spec(Df ) ∩ [0,ε)= 0/, then f is injective. -

Lecture 5: Submersions, Immersions and Embeddings
LECTURE 5: SUBMERSIONS, IMMERSIONS AND EMBEDDINGS 1. Properties of the Differentials Recall that the tangent space of a smooth manifold M at p is the space of all 1 derivatives at p, i.e. all linear maps Xp : C (M) ! R so that the Leibnitz rule holds: Xp(fg) = g(p)Xp(f) + f(p)Xp(g): The differential (also known as the tangent map) of a smooth map f : M ! N at p 2 M is defined to be the linear map dfp : TpM ! Tf(p)N such that dfp(Xp)(g) = Xp(g ◦ f) 1 for all Xp 2 TpM and g 2 C (N). Remark. Two interesting special cases: • If γ :(−"; ") ! M is a curve such that γ(0) = p, then dγ0 maps the unit d d tangent vector dt at 0 2 R to the tangent vectorγ _ (0) = dγ0( dt ) of γ at p 2 M. • If f : M ! R is a smooth function, we can identify Tf(p)R with R by identifying d a dt with a (which is merely the \derivative $ vector" correspondence). Then for any Xp 2 TpM, dfp(Xp) 2 R. Note that the map dfp : TpM ! R is linear. ∗ In other words, dfp 2 Tp M, the dual space of TpM. We will call dfp a cotangent vector or a 1-form at p. Note that by taking g = Id 2 C1(R), we get Xp(f) = dfp(Xp): For the differential, we still have the chain rule for differentials: Theorem 1.1 (Chain rule). Suppose f : M ! N and g : N ! P are smooth maps, then d(g ◦ f)p = dgf(p) ◦ dfp. -

Topology from the Differentiable Viewpoint
TOPOLOGY FROM THE DIFFERENTIABLE VIEWPOINT By John W. Milnor Princeton University Based on notes by David W. Weaver The University Press of Virginia Charlottesville PREFACE THESE lectures were delivered at the University of Virginia in December 1963 under the sponsorship of the Page-Barbour Lecture Foundation. They present some topics from the beginnings of topology, centering about L. E. J. Brouwer’s definition, in 1912, of the degree of a mapping. The methods used, however, are those of differential topology, rather than the combinatorial methods of Brouwer. The concept of regular value and the theorem of Sard and Brown, which asserts that every smooth mapping has regular values, play a central role. To simplify the presentation, all manifolds are taken to be infinitely differentiable and to be explicitly embedded in euclidean space. A small amount of point-set topology and of real variable theory is taken for granted. I would like here to express my gratitude to David Weaver, whose untimely death has saddened us all. His excellent set of notes made this manuscript possible. J. W. M. Princeton, New Jersey March 1965 vii CONTENTS Preface v11 1. Smooth manifolds and smooth maps 1 Tangent spaces and derivatives 2 Regular values 7 The fundamental theorem of algebra 8 2. The theorem of Sard and Brown 10 Manifolds with boundary 12 The Brouwer fixed point theorem 13 I 3. Proof of Sard’s theorem 16 4. The degree modulo 2 of a mapping 20 J Smooth homotopy and smooth isotopy 20 5. Oriented manifolds 26 The Brouwer degree 27 6. Vector fields and the Euler number 32 7. -

MATH 552 C. Homeomorphisms, Manifolds and Diffeomorphisms 2020-09 Bijections Let X and Y Be Sets, and Let U ⊂ X Be a Subset. A
MATH 552 C. Homeomorphisms, Manifolds and Diffeomorphisms 2021-09 Bijections Let X and Y be sets, and let U ⊆ X be a subset. A map (or function) f with domain U takes each element x 2 U to a unique element f(x) 2 Y . We write y = f(x); or x 7! f(x): Note that in the textbook and lecture notes, one writes f : X ! Y; even if the domain is a proper subset of X, and often the domain is not specified explicitly. The range (or image) of f is the subset f(U) = f y 2 Y : there exists x 2 U such that y = f(x) g: A map f : X ! Y is one-to-one (or is invertible, or is an injection) if for all x1, x2 in the domain, f(x1) = f(x2) implies x1 = x2 (equivalently, x1 6= x2 implies f(x1) 6= f(x2)). If f is one-to-one, then there is an inverse map (or inverse function) f −1 : Y ! X whose domain is the range f(U) of f. A map f : X ! Y is onto (or is a surjection) if f(U) = Y . We will say a map f : X ! Y is a bijection (or one-to-one correspondence) from X onto Y if its domain is all of X, and it is one-to-one and onto. If f is a bijection, then its inverse map f −1 : Y ! X is defined on all of Y . Homeomorphisms Let X and Y be topological spaces. Examples of topological spaces are: i) Rn; ii) a metric space; iii) a smooth manifold (see below); iv) an open subset of Rn or of a smooth manifold. -

M382D NOTES: DIFFERENTIAL TOPOLOGY 1. the Inverse And
M382D NOTES: DIFFERENTIAL TOPOLOGY ARUN DEBRAY MAY 16, 2016 These notes were taken in UT Austin’s Math 382D (Differential Topology) class in Spring 2016, taught by Lorenzo Sadun. I live-TEXed them using vim, and as such there may be typos; please send questions, comments, complaints, and corrections to [email protected]. Thanks to Adrian Clough, Parker Hund, Max Reistenberg, and Thérèse Wu for finding and correcting a few mistakes. CONTENTS 1. The Inverse and Implicit Function Theorems: 1/20/162 2. The Contraction Mapping Theorem: 1/22/164 3. Manifolds: 1/25/16 6 4. Abstract Manifolds: 1/27/16 8 5. Examples of Manifolds and Tangent Vectors: 1/29/169 6. Smooth Maps Between Manifolds: 2/1/16 11 7. Immersions and Submersions: 2/3/16 13 8. Transversality: 2/5/16 15 9. Properties Stable Under Homotopy: 2/8/16 17 10. May the Morse Be With You: 2/10/16 19 11. Partitions of Unity and the Whitney Embedding Theorem: 2/12/16 21 12. Manifolds-With-Boundary: 2/15/16 22 13. Retracts and Other Consequences of Boundaries: 2/17/16 24 14. The Thom Transversality Theorem: 2/19/16 26 15. The Normal Bundle and Tubular Neighborhoods: 2/22/16 27 16. The Extension Theorem: 2/24/16 28 17. Intersection Theory: 2/26/16 30 18. The Jordan Curve Theorem and the Borsuk-Ulam Theorem: 2/29/16 32 19. Getting Oriented: 3/2/16 33 20. Orientations on Manifolds: 3/4/16 35 21. Orientations and Preimages: 3/7/16 36 22. -

Introduction to Differential Geometry
Introduction to Differential Geometry Lecture Notes for MAT367 Contents 1 Introduction ................................................... 1 1.1 Some history . .1 1.2 The concept of manifolds: Informal discussion . .3 1.3 Manifolds in Euclidean space . .4 1.4 Intrinsic descriptions of manifolds . .5 1.5 Surfaces . .6 2 Manifolds ..................................................... 11 2.1 Atlases and charts . 11 2.2 Definition of manifold . 17 2.3 Examples of Manifolds . 20 2.3.1 Spheres . 21 2.3.2 Products . 21 2.3.3 Real projective spaces . 22 2.3.4 Complex projective spaces . 24 2.3.5 Grassmannians . 24 2.3.6 Complex Grassmannians . 28 2.4 Oriented manifolds . 28 2.5 Open subsets . 29 2.6 Compact subsets . 31 2.7 Appendix . 33 2.7.1 Countability . 33 2.7.2 Equivalence relations . 33 3 Smooth maps .................................................. 37 3.1 Smooth functions on manifolds . 37 3.2 Smooth maps between manifolds . 41 3.2.1 Diffeomorphisms of manifolds . 43 3.3 Examples of smooth maps . 45 3.3.1 Products, diagonal maps . 45 3.3.2 The diffeomorphism RP1 =∼ S1 ......................... 45 -3 -2 Contents 3.3.3 The diffeomorphism CP1 =∼ S2 ......................... 46 3.3.4 Maps to and from projective space . 47 n+ n 3.3.5 The quotient map S2 1 ! CP ........................ 48 3.4 Submanifolds . 50 3.5 Smooth maps of maximal rank . 55 3.5.1 The rank of a smooth map . 56 3.5.2 Local diffeomorphisms . 57 3.5.3 Level sets, submersions . 58 3.5.4 Example: The Steiner surface . 62 3.5.5 Immersions . 64 3.6 Appendix: Algebras .