GUIDE to PROCESS BASED MODELING of LAKES and COASTAL SEAS Anders Omstedt
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
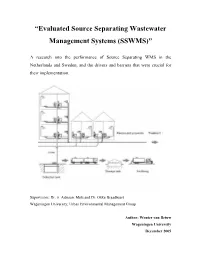
Evaluated Source Separating Wastewater Management Systems (SSWMS)”
“Evaluated Source Separating Wastewater Management Systems (SSWMS)” A research into the performance of Source Separating WMS in the Netherlands and Sweden, and the drivers and barriers that were crucial for their implementation. Supervisors: Dr. ir. Adriaan. Mels and Dr. Okke Braadbaart Wageningen University, Urban Environmental Management Group Author: Wouter van Betuw Wageningen University December 2005 Urban Environmental Management PREFACE As part of the masters Environmental Technology I perform a thesis on Decentralised Sanitation And Reuse (DESAR) for the Urban Environmental Management (UAM) group of the Wageningen University. The thesis is part of a large study on the evaluation of several aspects on the SSWMS. I hope that my study can contribute to the further optimisation of the comparison of SSWMS with the conventional WMS. And that more SSWMS are implemented over the world. In this research many actors were open for answers and helped me in gathering knowledge. Without these people, and there are too many to name them by person, this research was not possible. With some of them I had a very pleasant time, nice dinners and good conversations. I would like to thank all of you that contributed to this research. I hope that some of you can benefit from this study. Finally I would like to thank my supervisors, Adriaan and Okke, for the possibility to perform this study and perform research in Sweden; and for their assistance in my research. I wish you a pleasant reading, Wouter van Betuw 0 Urban Environmental Management SUMMARY Recently new concepts for domestic WMS are developed, the so called Source Separating WMS (SSWMS). -

Djurplankton I Tyresöfjärdarna
Djurplankton i Tyresöfjärdarna Resultat från en undersökning i juni 2012 Jan-Erik Svensson & Stefan Lundberg Naturhistoriska riksmuseets småskriftserie ISSN: 0585-3249 Detta PM redovisar resultaten från en undersökning av plankton i Tyresös inre skärgård, Stockholms län. Den har initierats och utförts på uppdrag av Tyresö Fiskevårdsförening. Projektledare har varit Docent Jan-Erik Svensson med biträde av Intendent Stefan Lundberg, Naturhistoriska riksmuseet. Projektet har bekostats gemensamt av Tyresö kommun och Tyresö Fiskevårdsförening. Foton: Stefan Lundberg (provtagningsbilder på framsidan) och Jan-Erik Svensson (organismer). Kartan är framtagen av författarna. Copyright Lantmäteriet 2013. Förstasidans illustrationer visar ett par av de arter bland djurplankon som påträffats vid undersökningen; hjuldjuret Keratella quadrata (nederst, vänster) och hinnkräftan Bosmina longispina maritima (överst, vänster). Foton: Jan-Erik Svensson. Dessutom visas ett par moment från de provtagningar som genomförts. Med ett transparant plaströr lyftes en vattenpelare upp (från två meters djup till ytan) på ett antal provtagningsstationer, från Tyresöfjärdarnas innersta delar till utsidan av Brandholmarna i Gränöfjärden. Foton: Stefan Lundberg. Eventuella frågor angående rapporten besvaras av författarna: Jan-Erik Svensson Stefan Lundberg Dr Forselius gata 28, vån 10 Naturhistoriska riksmuseet 413 26 Göteborg Box 50007 104 05 Stockholm Telefon: 08-519 541 35 Mobil: 070-962 05 35 Mobil: 0701-824 058 E-post: [email protected] E-post: [email protected] -

Underlag Till Lokalt Åtgärdsprogram För Flaten
Underlag till lokalt åtgärdsprogram för Flaten RAPPORT nr 2018-06-29 DHI Sverige AB i samarbete med SYNLAB och Naturcentrum AB Miljöförvaltningen Stockholm Stad Rapport 2018 Denna rapport har tagits fram inom DHI:s ledningssystem för kvalitet certifierat enligt ISO 9001 (kvalitetsledning) av Bureau Veritas underlag till lokalt åtgärdsprogram för flaten - slutversion.docx / mpe / 2018-06-29 Underlag till lokalt åtgärdsprogram för Flaten RAPPORT nr 2018-06-29 Framtagen för Miljöförvaltningen Stockholm Stad Kontaktperson Hillevi Virgin Foto: Per Saarinen Naturcentrum AB Projektledare Markus Petzén Kvalitetsansvarig Fredrik Bergh Handläggare Markus Petzén (DHI), Maria Roldin (DHI), Johan Kling (DHI), Madeleine Svelander (SYNLAB), Håkan Olofsson (SYNLAB), Per Saarinen (Naturcentrum) Uppdragsnummer 12803852 Godkänd datum 2018-06-29 Version Slutlig Klassificering DHI Sverige, Stockholm • Svartmangatan 18 • SE-111 29 Stockholm • Sweden Telefon: +46 10 685 08 00 underlag till lokalt åtgärdsprogram för flaten - slutversion.docx / mpe / 2018-06-29 INNEHÅLLSFÖRTECKNING 1 Sammanfattning .......................................................................................................... 1 2 Inledning ...................................................................................................................... 2 2.1 Bakgrund ........................................................................................................................................ 2 2.2 Syfte .............................................................................................................................................. -

Standardiserat Nätprovfiske I Drevviken
Standardiserat nätprovfiske i Drevviken En provfiskerapport utförd åt Miljöförvaltningen Stockholm Stad 2015-12-15 Sportfiskarna Tel: 08-410 80 680 E-post: [email protected] Postadress: Svartviksslingan 28, 167 39 Bromma Hemsida: www.sportfiskarna.se © Sportfiskarna 2015 Författare: Tobias Fränstam Omslag/bild/illustration: Tobias Fränstam 1 Sammanfattning I början av augusti 2015 provfiskades Drevviken med 32 sjöprovfiskenät på uppdrag av Stockholms stad. Projektet har delfinansierats av Tyresåns vattenvårdsförbund och Stockholm vatten. Vid provfisket fångades elva olika fiskarter. Abborre, benlöja, björkna, braxen, gers, gädda, gös, mört, ruda, sarv och sutare. Abborren var den mest förekommande fiskarten i provfisket och även den fiskart som utgjorde den största fångstvikten. Förutom abborre domineras sjöns fiskbestånd av vitfiskar med fiskarter som mört, björkna och braxen. Årets provfiske tyder på att Drevviken lider av kraftig närsaltsbelastning. Syrgasförhållandena är dåliga på djupare vatten vilket gör att fisk främst lever i sjöns övre halva under sommaren. Andelen vitfisk i fångsten och totalvikten per nät var högt i provfisket. Båda dessa faktorer är något som indikerar övergödning. Vid detta provfiske fångades ingen nors vilken är en art som tidigare funnits i sjön och som är känslig mot övergödning. Trots ett resultat som pekar på att Drevviken är övergödd kan man se en trend åt att fiskbeståndet, och sjön som ekosystem, har förbättrats jämfört med det tidigare provfisket som utfördes i Drevviken 1997. Nu är artbalansen jämnare med ett större inslag av abborre i fångsten och fisk lever djupare i sjön (förbättrade syrgasförhållanden). Sammantaget verkar fiskbeståndet ha förbättrats. Utöver provfisket gjordes även en vegetationskartering kring Drevvikens stränder med ekolod. Vegetationskarteringen visade att ungefär ¼ av Drevvikens botten är bevuxen med undervattensvegetation. -

Yngern Är Länets Största Referenssjö Och Provfiskades Under 1998 Av Sjöns Fiskevårdsområdesförening
1999:14 Provfiske i åtta sjöar i Stockholms län Uppföljning av tidsseriesjöar 1997 och 1998 Miljö- och planeringsavdelningen Provfiske i åtta sjöar i Stockholms län Uppföljning av tidsseriesjöar 1997 och 1998 Länsstyrelsen i Stockholms län Miljöenheten 1998-02-04 1 Förord Under somrarna 1997 och 1998 lät Länsstyrelsen i Stockholms län provfiska sjöarna Drevviken (Huddinge, Haninge, Stockholm och Tyresö kommuner), Långviksträsket (Värmdö kommun), Norrviken (Sollentuna och Upplands Väsby kommuner), Uttran (Botkyrka kommun), Vidsjön (Värmdö kommun) och Svulten (Vallentuna sjön). Provfiskena ingår som en del i den regionala miljöövervakningen av länets regionala tidsseriesjöar, som dels utgörs av relativt opåverkade skogsjöar, dels av mer eller mindre påverkade tätortssjöar. Sjöarna är inte tidigare provfiskade i Länsstyrelsens regi och syftet har därför primärt varit att beskriva fiskbestånden i sjöarna. Förhoppningen är att framtida provfisken, tillsammans med vattenkvalitetsdata, ska bilda ett underlag för att följa förändringar i bestånden. Resultaten från ytterligare två provfisken presenteras trots att de inte är provfiskade i Länsstyrelsen regi. Yngern är länets största referenssjö och provfiskades under 1998 av sjöns fiskevårdsområdesförening. Magelungen provfiskades under 1997 av Sportfiskarna Stockholmsdistriktet och resultaten är här medtagna för att sjön är belägen i omedelbar anslutning till Drevviken och i övrigt hyser stora likheter. Yoldia Naturundersökningar har utfört provfisken enligt Sötvattenslaboratoriets standardiserade -

Åtgärdsprogram För Tyresån 2016-2021.Pdf
Åtgärdsprogram för Tyresån och Kalvfj ärden 2016–2021 Huvudförfattare till rapporten är Iréne Lundberg. Arbetsgruppen för Tyresåns vattenvårdsförbund har bidragit med faktauppgifter och diskuterat layout och innehåll: Göran Bardun, Fred Erlandsson, Tiina Laantee, Thomas Lagerwall, Juha Salonsaari och Linnea Sörenby. Emma Lilliesköld har korrekturläst rapporten. Sven A. Svennberg har översatt sammanfattningen till engelska. Tack alla för er medverkan! FÖRFATTARE | 3 Omslagsbild: Ön Notholmen i Kalvfjärden nära Tyresö slott. Foto Christin Åhlén. Tyresåns vattenvårdsförbund 2016 Rapporten fi nns som pdf-fi l på vår webbplats www.tyresan.se. | 4 Förord Många har nära till någon av Tyresåns sjöar eller vattendrag. Vattnen spelar en stor roll i människors liv, vare sig det är genom fi ske, bad, skridskoåkning eller ett vattenblänk från fönstret. Genom våra aktiviteter påverkas till exempel vattendragens sträckning, hur rena vattnen är och hur fi sken kan vandra. Sedan drygt tjugo år bedrivs ett samarbete i vattenfrågor i Tyresåns avrinningsområde, ett samarbete för att låta vattnets gränser bestämma vilka åtgärder som ska göras och hur områden planeras. Förbundet arbetar för renare vatten och ökade naturvärden i alla Tyre- såns sjöar, vattendrag, kustvatten och grundvatten. Åtgärdsprogrammet har tagits fram i samarbete mellan de sex medlemskommunerna. Åtgärderna syftar till att minska övergödning och påverkan från miljögifter, öka och bi- behålla naturvärden, förebygga effekter av klimatförändringar och underlätta för det rör- liga friluftslivet -
Ecosanres Publications Series Urine Diversion: One Step Towards Sustainable Sanitation
EcoSanRes Publications Series Report 2006-1 Urine Diversion: One Step Towards Sustainable Sanitation Elisabeth Kvarnström, Karin Emilsson, Anna Richert Stintzing, Mats Johansson, Håkan Jönsson, Ebba af Petersens, Caroline Schönning, Jonas Christensen, Daniel Hellström, Lennart Qvarnström, Peter Ridderstolpe and Jan-Olof Drangert Blank page Urine Diversion – One Step Towards Sustainable Development Urine Diversion: One Step Towards Sustainable Sanitation Elisabeth Kvarnström, Karin Emilsson, Anna Richert Stintzing, Mats Johansson, Håkan Jönsson, Ebba af Petersens, Caroline Schönning, Jonas Christensen, Daniel Hellström, Lennart Qvarnström, Peter Ridderstolpe, Jan-Olof Drangert 1 EcoSanRes Programme Stockholm Environment Institute Lilla Nygatan 1 Box 2142 SE-103 14 Stockholm, Sweden Tel: +46 8 412 1400 Fax: +46 8 723 0348 [email protected] www.sei.se This publication is downloadable from www.ecosanres.org SEI Communications Communications Director: Arno Rosemarin Publications Manager: Erik Willis Layout: Lisetta Tripodi Web Access: Howard Cambridge Copyright 2006 by the EcoSanRes Programme and the Stockholm Environment Institute This publication may be reproduced in whole or in part and in any form for educational or non-profit purposes, without special permission from the copyright holder(s) provided acknowledgement of the source is made. No use of this publication may be made for resale or other commercial purpose, without the written permission of the copyright holder(s). ISBN 91 975238 9 5 AUTHOR AFFILIATIONS: Elisabeth Kvarnström, VERNA -

Stockholm's Environmental Programme
City of Stockholm Stockholm’s Environmental Programme En route to sustainable development Contents 03 Six goals en route to sustainable development 04 The Environmental Programme affects all municipal operations 07 Everyone can help to achieve these goals Environmental goals for Stockholm: 09 Goal 1 Environmentally efficient transport 15 Goal 2 Safe products 23 Goal 3 Sustainable energy consumption 29 Goal 4 Ecological planning and management 37 Goal 5 Environmentally efficient waste processing 43 Goal 6 A healthy indoor environment On 17th February 2003, Stockholm City Council decided to adopt this environ- mental programme, which remains in force until 2006 inclusive. The Environment and Health Administration has coordinated the production of the Environmental Programme, and a substantial number of staff from the Environment and Health Administration, representatives of other Departments and municipal companies within the City, and a number of other external experts, have all contributed to the completion of this project. ISBN: 91 88018 93 8 Production: Blomquist Annonsbyrå AB, 2003. Circulation: 5,000. Illustrations: Tobias Flygar and Robert Nyberg. Translation: Speak Right AB. Six goals en route to sustainable development Stockholm is growing and faces the challenge posed by both retaining and developing its unique character. The City must be sustainable and an attractive place for people to live and work. The City generates the preconditions for people’s health and well-being. Goal 1 A good environment creates the potential for a good life. Environmentally This environmental programme is the fifth such programme since the efficient transport first one was produced in the mid-1970s. It contains the goals we have set for the most critical environmental issues. -

The Swedish Eco-Sanitation Experience
The Swedish Eco-Sanitation Experience Case studies of successful projects implementing alternative techniques for wastewater treatment in Sweden 0 The case studies of eco-sanitation projects have been taken from various articles with the approval and assistance of WRS - Water Revival Systems AB (Ebba af Petersens). Additional information and references are provided at the end of each case study. Title: The Swedish Eco-Sanitation Experience - Case studies of successful projects implementing alternative techniques for wastewater treatment in Sweden. Edited by Michael Druitt Project Officer Coalition Clean Baltic December 2009 With support from CCB Secretariat Östra Ågatan 53, SE-753 22 Uppsala, Sweden Phone: +46 18 71 11 55 Fax: + 46 18 71 11 70 E-mail: [email protected] www.ccb.se 1 CONTENTS INTRODUCTION ......................................................................................................... 3 URINE DIVERSION .................................................................................................... 4 CASE STUDY 1 - Tanum ........................................................................................ 4 CASE STUDY 2 - Elias Fries school in Hylte community ....................................... 7 CASE STUDY 3 - The Understenshöjden project ................................................... 8 CASE STUDY 4 - Gebers collective housing project, Orhem, Sweden. ............... 10 CASE STUDY 5 - Kullön ....................................................................................... 15 CASE STUDY 6 - -

Can We Plan for Social Sustainability? a Study of Stora Sköndal, Stockholm
EXAMENSARBETE INOM SAMHÄLLSBYGGNAD, AVANCERAD NIVÅ, 30 HP STOCKHOLM, SVERIGE 2020 Can We Plan for Social Sustainability? A Study of Stora Sköndal, Stockholm ERIKA SVENSSON KTH SKOLAN FÖR ARKITEKTUR OCH SAMHÄLLSBYGGNAD Abstract The foundation Stora Sköndal is currently planning a city development programme with a focus on creation of a modern, socially sustainable urban district. The programme is called “Framtidens Stora Sköndal”. With close collaboration with the city planning office in Stockholm and with the aim to contribute to the goals that the City of Stockholm has set for a development of a coherent and socially sustainable city, the foundation aims to build “an inclusive area, characterized by empathy and an open-minded attitude” where people from different backgrounds, different origins, with different economical, physical, and psychological abilities can meet and live together. The programme plan encompasses new housing for approximately 10,000 additional dwellers and thousands of new workplaces. It also includes for example, six character areas and six principles for urban planning that have been developed for the programme to support the goals of creating a socially sustainable urban district of Sköndal. The programme is planned to be implemented by 2035 hence, within this study it will not be possible to draw any conclusions on the final result. Rather, this study is a descriptive study that discusses theory, visions, programme documents and the process behind the programme and the different actors involved. The study has showed that the programme for Framtidens Stora Sköndal has a potential to deliver at least some part of the visions and goals they aiming at. -

Kräftor Och Kräftpest I Stockholms Län 1996
0s MåJ> Länsstyrelsen I Stockholms Lä n RAPPORT 1997:07 Kräftor och kräftpest i Stockholms län 1996 Enheten för regional utveckling Text och layout: Lena Svärd Förord Denna rapport om kräftor i Stockholms län har kommit till efter en förfrågan från Fiske riverket hösten 1996. De nya riktlinjer som gäller för bevarandet av den biologiska mångfalden har gjort det nödvändigt att se över landets kräftbestånd. Fiskeriverket öns kade en redovisning av vilka vatten i länet som ska förbehållas flodkräfta och i vilka vat ten utplantering av signalkräfta kan tillåtas. När underlaget togs fram konstaterades att uppgifterna kunde ha allmänt intresse och Länsstyrelsen beslutade att utarbeta följande rapport. Uppgifterna som redovisas i rapporten är hämtade ur Länsstyrelsens sjöregister med kompletteringar gjorda efter en förfrågan som gick ut till kommuner och organisa tioner. För varje flod- och kustområde har Länsstyrelsen gjort en bedömning av vilka vattenom råden som ska sparas som flodkräftområde eller om tillstånd till utplantering av signal kräfta kan lämnas. Vid denna bedömning har hänsyn tagits till hur många sjöar med flod- respektive signalkräfta det finns inom området. Rapporten har tagits fram vid Länsstyrelsens enhet för regional utveckling, fiskefunktio- nen. Miljövårdsenheten har varit behjälplig med många uppgifter. Sammanställning och layout har utförts av Lena Svärd. Rapporten gör inte anspråk på att vara en vetenskapligt undersökning, utan utgör en lä gesbeskrivning utifrån de kunskaper Länsstyrelsen för närvarande har. Det innebär att det kan finnas brister i materialet. Det saknas t ex uppgifter om kräftbestånd i många sjöar. Önskvärt vore att undersökningar genom provfiske gjordes av de enskilda bestånden av flod- respektive signalkräfta samt att kräftpestens utbredning i länet närmare analysera des. -

Fate of Nonylphenol in Lakes
Fate of Nonylphenol in lakes: Case study modelling of two small lakes in Stockholm, Sweden Wei Chang Master of Science Thesis Stockholm 2010 Fate of nonylphenol in lakes: Case study modelling of two small lakes in Stockholm, Sweden Wei Chang Supervisor: Maria E. Malmström June, 2010 Stockholm TRITA-IM 2010:31 ISSN 1402-7615 Industrial Ecology, Royal Institute of Technology www.ima.kth.se Summary Nonylphenol is a widely used organic compound which has been reported to have potential risk to aquatic environment. According to the result of recent studies, it has been detected in many lakes in Stockholm, Sweden, which raised great concern. In this thesis, a dynamic fate model was adopted and modified from literature in order to study the distribution and concentration of nonylphenol in small lakes, guide the field sampling and provide information for corresponding decision making. Two lakes in Stockholm, Lake Trekanten and Lake Drevviken, were selected as case studies. Another model was included for comparison purpose. Based on the model result, the most important nonylphenol removal process in both lakes was the transformation in water. A sensitivity analysis showed that the model results were most sensitive to the process of nonylphenol water inflow. In terms of sediment concentration of nonylphenol, satisfactory agreements were obtained from the comparison between model results and field data. However, problems, such as the simultaneous handling of nonylphenol and nonylphenol ethoxylates, may cause uncertainties on the model performance. The result of the analysis about scenario load change and the seasonal variation showed that the sediment nonylphenol content is more stable to the seasonal change compare to nonylphenol water content, but the response times to load change of nonylphenol content in these two compartments are quite close and somewhat lower than the water residence time.