Richard Delaney, Ropelab
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Catalyst N05 Jul 200
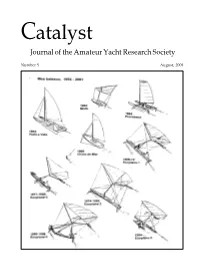
Catalyst Journal of the Amateur Yacht Research Society Number 5 August, 2001 Catalyst News and Views 3 Winds of Change 2001 6 Keiper Foils 7 Letters Features 10 Wind Profiles and Yacht Sails Mike Brettle 19 Remarks on Hydrofoil Sailboats Didier Costes 26 Designing Racing Dinghies Part 2 Jim Champ 29 Rotors Revisited Joe Norwood Notes from Toad Hill 33 A Laminar Flow Propulsion System Frank Bailey 36 Catalyst Calendar On the Cover Didier Costes boats (See page 19) AUGUST 2001 1 Catalyst Meginhufers and other antiquities I spent most of July in Norway, chasing the midnight sun Journal of the and in passing spending a fair amount of time in Norway’s Amateur Yacht Research Society maritime museums looking at the development history of the smaller Viking boats. Editorial Team — Now as most AYRS members will know, the Vikings rowed Simon Fishwick and sailed their boats and themselves over all of Northern Sheila Fishwick Europe, and as far away as Newfoundland to the west and Russia and Constantinople to the east. Viking boats were Dave Culp lapstrake built, held together with wooden pegs or rivets. Specialist Correspondents Originally just a skin with ribs, and thwarts at “gunwale” level, th Aerodynamics—Tom Speer by the 9 century AD they had gained a “second layer” of ribs Electronics—David Jolly and upper planking, and the original thwarts served as beams Human & Solar Power—Theo Schmidt under the decks. Which brings us to the meginhufer. Hydrofoils—George Chapman I’m told this term literally means “the strong plank”, and is Instrumentation—Joddy Chapman applied to what was once the top strake of the “lower boat”. -

NS14 ASSOCIATION NATIONAL BOAT REGISTER Sail No. Hull
NS14 ASSOCIATION NATIONAL BOAT REGISTER Boat Current Previous Previous Previous Previous Previous Original Sail No. Hull Type Name Owner Club State Status MG Name Owner Club Name Owner Club Name Owner Club Name Owner Club Name Owner Club Name Owner Allocated Measured Sails 2070 Midnight Midnight Hour Monty Lang NSC NSW Raced Midnight Hour Bernard Parker CSC Midnight Hour Bernard Parker 4/03/2019 1/03/2019 Barracouta 2069 Midnight Under The Influence Bernard Parker CSC NSW Raced 434 Under The Influence Bernard Parker 4/03/2019 10/01/2019 Short 2068 Midnight Smashed Bernard Parker CSC NSW Raced 436 Smashed Bernard Parker 4/03/2019 10/01/2019 Short 2067 Tiger Barra Neil Tasker CSC NSW Raced 444 Barra Neil Tasker 13/12/2018 24/10/2018 Barracouta 2066 Tequila 99 Dire Straits David Bedding GSC NSW Raced 338 Dire Straits (ex Xanadu) David Bedding 28/07/2018 Barracouta 2065 Moondance Cat In The Hat Frans Bienfeldt CHYC NSW Raced 435 Cat In The Hat Frans Bienfeldt 27/02/2018 27/02/2018 Mid Coast 2064 Tiger Nth Degree Peter Rivers GSC NSW Raced 416 Nth Degree Peter Rivers 13/12/2017 2/11/2013 Herrick/Mid Coast 2063 Tiger Lambordinghy Mark Bieder PHOSC NSW Raced Lambordinghy Mark Bieder 6/06/2017 16/08/2017 Barracouta 2062 Tiger Risky Too NSW Raced Ross Hansen GSC NSW Ask Siri Ian Ritchie BYRA Ask Siri Ian Ritchie 31/12/2016 Barracouta 2061 Tiger Viva La Vida Darren Eggins MPYC TAS Raced Rosie Richard Reatti BYRA Richard Reatti 13/12/2016 Truflo 2060 Tiger Skinny Love Alexis Poole BSYC SA Raced Skinny Love Alexis Poole 15/11/2016 20/11/2016 Barracouta -
Firestarters Summits of Desire Visionaries & Vandals
31465_Cover 12/2/02 9:59 am Page 2 ISSUE 25 - SPRING 2002 £2.50 Firestarters Choosing a Stove Summits of Desire International Year of Mountains FESTIVAL OF CLIMBING Visionaries & Vandals SKI-MOUNTAINEERING Grit Under Attack GUIDEBOOKS - THE FUTURE TUPLILAK • LEADERSHIP • METALLIC EQUIPMENT • NUTRITION FOREWORD... NEW SUMMITS s the new BMC Chief Officer, writing my first ever Summit Aforeword has been a strangely traumatic experience. After 5 years as BMC Access Officer - suddenly my head is on the block. Do I set out my vision for the future of the BMC or comment on the changing face of British climbing? Do I talk about the threats to the cliff and mountain envi- ronment and the challenges of new access legislation? How about the lessons learnt from foot and mouth disease or September 11th and the recent four fold hike in climbing wall insurance premiums? Big issues I’m sure you’ll agree - but for this edition I going to keep it simple and say a few words about the single most important thing which makes the BMC tick - volunteer involvement. Dave Turnbull - The new BMC Chief Officer Since its establishment in 1944 the BMC has relied heavily on volunteers and today the skills, experience and enthusi- District meetings spearheaded by John Horscroft and team asm that the many 100s of volunteers contribute to climb- are pointing the way forward on this front. These have turned ing and hill walking in the UK is immense. For years, stal- into real social occasions with lively debates on everything warts in the BMC’s guidebook team has churned out quality from bolts to birds, with attendances of up to 60 people guidebooks such as Chatsworth and On Peak Rock and the and lively slideshows to round off the evenings - long may BMC is firmly committed to getting this important Commit- they continue. -

Experience the Thrill of Heights
EXPERIENCE THE THRILL OF HEIGHTS The multi-way splitter is not for sale in the US. a brand of 2 Walltopia is the world leader in climbing walls manufacturing and active entertainment attractions with more than 1800 projects in over 70 countries. Our Active Entertainment product line evolved from our experience in the climbing wall industry and the natural human craving for play. We were driven by the desire to transform physical activity into amusing and purposeful play, suitable and entertaining for everyone, with no need of specific sport preparation and minimum equipment required for the participants. Providing versatile experience, in their core our products share one and the same goal. They help us get active and encourage us to spend more time with our family and friends in a meaningful, present way. That’s what we call active entertainment. 4 EXPERIENCE THE THRILL OF HEIGHTS Walltopia Ropes Courses challenge flexibility, balance and strength in a thrill-boosting way, while ensuring maximum safety in conjunction with eurocode safety standards. All our ropes courses offer a wide range of difficulty levels that appeal to both children and adults. The brand’s attractions are appropriate for participants as young as five years old. The multi-way splitter is not for sale in the US. OVERVIEW Key points MULTI-DEMOGRAPHIC APPEAL FLEXIBLE BUSINESS MODELS The difficulty of each obstacle can be Our courses accommodate linear tailored to preference or to specific per-ride or multi-directional hourly- age groups. ticketed operation models. OPERATION EFFICIENCY EASY INTEGRATION Highest manufacturing and safety Flexible designs & extensive theming standards ensure hassle-free operation options allow for easy integration while and low maintenance costs. -

Passive Protection Protection Passive Passive Sicherungen
A chaque fois que vous réformez une pièce de matériel, détruisez- „Verkeilt“ sich die Sicherung, ist die Gefahr geringer, dass sie FRANÇAIS la pour empêcher toute utilisation ultérieure. sich bei Seilzug lockert oder gar herausfällt. NOTICE D’UTILISATION ◆ Zum Entfernen eines Stopper oder Hex aus einem Riss benötigen STOPPERS ET HEXENTRICS D’OCCASION Sie eventuell ein Nut Tool. Vermeiden Sie es, das Kabel häufig North America: Black Diamond Equipment, Ltd. Nous déconseillons vivement l’utilisation de matériel d’occasion. stark zu verbiegen, da es hierbei übermässig belastet wird und 2084 East 3900 South Salt Lake City, UT 84124 AVERTISSEMENT Vous devez connaître les antécédents de votre matériel afin de schliesslich brechen kann. Phone: (801) 278-5533, Fax: (801) 278-5544 Pour l’escalade et l’alpinisme uniquement. pouvoir juger de sa fiabilité. Email: [email protected] L’escalade et l’alpinisme sont des activités EN 12270 : Les Stoppers, Micro Stoppers, Micro Stoppers Offset et Europe: Black Diamond Equipment AG ! Verwenden Sie zum Einhängen in das Kabel immer einen Hexentrics Black Diamond sont conformes à la norme européenne Christoph Merian Ring 7 4153 Reinach, Switzerland dangereuses. Vous devez comprendre et accepter Karabiner. Fädeln Sie niemals Gurtband oder Seil direkt durch EN 12270 relative à l’équipement d’alpinisme et d’escalade – Phone: +41/61 564 33 33, Fax: +41/61 564 33 34 les risques encourus avant de vous engager. Les ein Stopper- oder Hexentric-Kabel. Coinceurs – Exigences de sécurité et méthodes d’essai. Email: [email protected] mineurs et autres personnes dans l’incapacité ! Vermeiden Sie bei der Platzierung von Sicherungen, dass das Asia: Black Diamond Equipment Asia d’assumer cette responsabilité doivent pratiquer MARQUAGES Kabel bei Belastung über scharfe Kanten läuft. -

Watch Hill When the Force IS with You the Sea That Never Sleep
Sailing the Northeast When the Force IS with You The Sea that Never Sleeps Destination: Watch Hill June 2018 • FREE www.windcheckmagazine.com Molded Composites IF YOU DON’T WANT TO GIVE UP SPEED FOR DURABILITY THEN DON’T. GO BEYOND EXPECTATIONS MILFORD, CT 203-877-7621 HUNTINGTON, NY 631-421-7245 northsails.com v MCMICHAEL YACHT BROKERS Experience counts. Mamaroneck, NY 10543 Newport, RI 02840 914-381-5900 401- 619 - 5813 The new J/121 is racing on LIS this summer and multiple boats headed for Bermuda. Call for your sea trial! The new MJM 43z outboard express The new Hanse 418 available for cruiser. Sea trials now available. mid-summer delivery. The new Amel 50 luxury passagemaker. Dehler 38 on display and available Contact us for sea trials. for late summer delivery. See our listings in the Brokerage Section www.mcmyacht.com Windcheck P4CB - June 2018.indd 1 5/14/2018 3:53:41 PM publisher's log Sailing the Northeast Issue 175 Don’t let Perfect be the enemy of Good (enough) Publisher Benjamin Cesare My father was an artisan. He loved craft and beauty. So much so that as a kid, [email protected] if I wanted to fashion a new Laser tiller in his shop, I had to be sure to cut and Associate Publisher drill the Montreal hockey stick and attach the PVC tube for a tiller extension Anne Hannan when he was not around. Otherwise, while he might appreciate my logic for [email protected] the weight-to-strength ratio of those laminated Montreal shafts, he would be Editor-at-Large far more concerned with why I had not chosen mahogany. -

HSC General Membership Meeting Agenda
The FO’C’S’LE Hunterdon Sailing Club, Inc. MARCH 2006 NO. 400 Laser Fleet Report I am pleased to report that our club has been selected to HSC host this year's NJYRA Laser Championships on Sunday, July 30. Be prepared for some exciting racing at Spruce General Membership Run with New Jersey's best! Meeting Derek Stow writes that the spring season for Laser frostbit- ing begins on March 12 at the Cedar Point Yacht Club in When: Sunday, March 26 at 1:00 PM Westport, Connecticut. Following that is a regatta at Cedar NOTE (12:00 to 1:00 is the early-bird hour for those Point on April 29. Don't forget the drysuit or wetsuit. For wishing to order lunch and/or talk sailing) details go to www.cedarpointyc.org. Where: Sunset Inn, Clinton NJ Although it's been a quiet winter for Laser sailors around West side of Route 31, about 2 miles North of I-78) here, the Winter 2006 edition of The Laser Sailor (published by the International Laser Class Association) just arrived, with lots of news about upcoming events. A Agenda sampling: Laser District 10 Championships at Surf City, June 17 and 18; Atlantic Coast Championships, July 15 and 16 at Sayville Yacht Club (New York); North Ameri- can Championships at St. Margaret's Bay, Nova Scotia, 1:00 Welcome July 20-23. 1:15 Election of Treasurer for the balance of 2006 Ned Jones from Laser builder Vanguard writes for The NOTE: Tom Maier after many years of wonder- Laser Sailor about the Laser: "The boat, the people, and the ful service has elected to apply for early retirement. -

2010 Metolius Climbing 2
2010 METOLIUS CLIMBING 2 It’s shocking to think that it’s been twenty-five years since we cranked up the Metolius Climbing machine, and 2010 marks our 25th consecutive year in business! Wow! Getting our start in Doug Phillips’ tiny garage near the headwaters of the Metolius River (from where we take our name), none of us could have envisioned where climbing would be in 25 years or that we would even still be in the business of making climbing gear. In the 1980s, the choices one had for climbing equipment were fairly limited & much of the gear then was un-tested, uncomfortable, inadequate or unavailable. Many solved this problem by making their own equipment, the Metolius crew included. 3 (1) Smith Rock, Oregon ~ 1985 Mad cranker Kim Carrigan seen here making Much has changed in the last 2 ½ decades since we rolled out our first products. The expansion we’ve seen has been mind-blowing the 2nd ascent of Latest Rage. Joined by fellow Aussie Geoff Wiegand & the British hardman Jonny Woodward, this was one of the first international crews to arrive at Smith and tear the and what a journey it’s been. The climbing life is so full of rich and rewarding experiences that it really becomes the perfect place up. The lads made many early repeats in the dihedrals that year. These were the days metaphor for life, with its triumphs and tragedies, hard-fought battles, whether won or lost, and continuous learning and growing. when 5.12 was considered cutting edge and many of these routes were projected and a few of Over time, we’ve come to figure out what our mission is and how we fit into the big picture. -

Rigging Maintenance Wayfarers at the Blackbeard Regatta in New Bern What a Trip! Page 2 TELL TALES
September 2015 Photo by Scott Bogue An Awesome August! Rigging Maintenance Wayfarers at the Blackbeard Regatta in New Bern What a Trip! Page 2 TELL TALES Racing Series Sep. 12 & 13 (2nd weekend every month ) Lake Townsend Social Sail* Sept. 26 UNCG (4th Sat. every month ) Lake Townsend Tanzer 16 Nationals Sep. 19-20 Hosted by LTYC Halloween on the Townsend IV Oct. 31, Nov. 1 and 2 Lake Townsend All proceeds go to Earlier. org Regatta and Golf Tournament 2015 Calendar and participation scratch sheets are posted on the website: laketownsendyachtclub.com then click on “Scratch Sheet: Participation” Lake Townsend is open until 7:30 pm. The lake is always closed on Wednesdays. *Saturday, Sept. 26th UNCG Outdoor Adventure Group UNCG Outdoor Adventures is partnering with the Lake Townsend Yacht Club for a new adven- ture to learn about sailing small boats! Students will get the experience of being behind the sail and helping fellow boaters out as they learn alongside you. Volunteers are needed ! Please bring your boat and help students learn knot tying, boat rigging, and how to sail. Thanks! Please sign up on the scratch sheet soon as we need to give UNCG a head count for food. FS Atl. Coast Championship Sep.12-13 BBSC, New Bern, NC Youth Regatta Sep. 20th OHSC, High Point, NC VISA Invitational Oct. 3-4 VISA YC, Smith Mtn. Lake, VA Halloween on the Townsend Oct. 31–Nov.1 Lake Townsend Interclub Nov. 7 LTYC Fall 48 Nov. 14-15 LNYC, Mooresville, NC Page 3 TELL TALES Thank you, Clint for our new sign and to Chester for helping install it! 7 Interclub LTYC 28 Social Sailing Oak Hollow Sailing Club Invites You to Our Youth Regatta September 20th, 2015 Oak Hollow Sailing Marina (3700 Waterview Road, High Point, NC) Captain’s meeting: 12:30pm Race review and learning session: 1:00pm First race: 1:30pm Afternoon snacks: 3:15pm Between or after the races there will be fun sailing activities to improve your skills. -

Afsc 2A6x1a/C/D/E Aerospace Propulsion Jet Engine Career Field
DEPARTMENT OF THE AIR FORCE CFETP 2A6X1A/C/D/E Headquarters US Air Force Parts I and II Washington, DC 20330-1030 1 AUGUST 2002 AFSC 2A6X1A/C/D/E AEROSPACE PROPULSION JET ENGINE CAREER FIELD EDUCATION AND TRAINING PLAN CFETP 2A6X1A/C/D/E, August 2002 CAREER FIELD EDUCATION AND TRAINING PLAN AEROSPACE PROPULSION JET ENGINE SPECIALTY AFSC 2A6X1A/C/D/E Table of Contents PART I Preface......................................................................................................................................... 2 Abbreviations/Terms Explained.................................................................................................. 3 Section A--General Information..................................................................................................5 Purpose of the CFETP Use of the CFETP Coordination and Approval of the CFETP Section B--Career Progression and Information ......................................................................... 6 Specialty Description Skill/Career Progression Apprentice Level (3) Journeyman Level (5) Craftsman Level (7) Superintendent Level (9) Training Decisions Community College of the Air Force Career Field Path Base/Unit Education and Training Manager Checklist Section C--Skill Level Training Requirements........................................................................... 12 Purpose Training Requirements Apprentice Level (3) Journeyman Level (5) Craftsman Level (7) Superintendent Level (9) Section D--Resource Constraints ............................................................................................... -

In This Issue
windwardle The Official Newsletter of the International Sunfish Class Summer 1987 Association and the Force 5 Class Association Vol. II, No. 3 MIDWINTER TITLE TO BOB FINDLAY For the second time in three years, Bob Findlay of Glencoe, Illinois won the predominantly heavy air National Midwinter Championship held at Davis Island Yacht Club in Tampa, Florida, March 6-8. In a come-from-behind effort, Joe Blouin of New Orleans, Louisiana climbed to second place overall and Steve Manson of Rockaway, New Jersey hung on to third place . These top three finishers are the first to qualify for the 1988 Sunfish World Championship. Rounding out the top five were Chris Lowrie of Lake Forest, Illinois in fourth and 1986 Midwinter Champion Nancy Haberland , then resid ing in Key West, Florida, in fifth . Twenty-five to 30 knot winds and rain presided over the practice races on Friday held Inthis issue inside Davis Island Harbor. Multiple starts and short courses helped some rusty sailors regain their skills. Saturday dawned gloomy with winds settling down to 8-10 knots before the 1:00 p.m. start with thundersqualls threatening . Two Gold Cup courses, approximately Daggerboards & Rudders . .. 2 six miles in length were completed before the rain and wind arrived. The third race proved to be the turning point for Findlay. After cracking a boom halfway through race two , ISCA Organization Flowchart . 3 Findlay lost ten places, but managed to finish 15th with the damaged equipment. Dashing Blade Reshaping . .. 4 into shore between races, Findlay was able to replace his boom and make the start, Masters Rep Named . -

New Members Welcome Call (530) 245-0964 Federal ID# 02-0814681
New Members Welcome Call (530) 245-0964 Federal ID# 02-0814681 ANNUAL MEMBERSHIP DUES ARE AS FOLLOWS: Limited Membership ($150): includes a two-hour lesson, and use of all club boats including the American 16, Capri 14.2, Sunfish, and Force 5 small sailboats. General Membership ($250): includes a two-hour lesson and use of all club boats up to 16’ including the Hobie Cat 16' Catamarans/Getaways Gold Membership ($300): includes use of ALL club boats, and both Catalina 25’s Current Members please note: Annual memberships are only good through December 31st. New Memberships Available NOW!!! Join now and sail through December 31st KIDS SUMMER SAILING CAMP Call Redding Recreation Department to register: (530) 245-0964 Thanks to all involved in perpetuating our summer of sailing fun by helping the Redding Yacht Club host KIDS SAILING CAMP, on Whiskeytown Lake. To date, Over 900 kids have attended. Special thanks to Carl Strahle, and, our Youth Sailing Instructors. Also, Thank You to Redding Recreation Dept. for Program Registration, and, Cal Boating for the grant to support eighty Kids to attend our Kids Sailing Camp Program. Thanks also to the National Park Service whom issue the use permits in the Whiskeytown Recreation Area. Last year, we had great wind all summer, taught over eighty Kids how to: sail, tie knots, rig a sailboat, right a Sunfish sailboat, how to put a sailboat away (properly), and how to work together. New Members Welcome Call (530) 245-0964 Federal ID# 02-0814681 .….……….…….NOW………....……….. MEET OUR FLEET OF SAILBOATS Sunfish../).. Force 5../)….. New Members Welcome Call (530) 245-0964 Federal ID# 02-0814681 *** Hobie 16’ Geataways…/)…/)…/)… ***Capri 14.2 Catalina 25.../)…/)… .