Elmersolver Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Amazon's Antitrust Paradox
LINA M. KHAN Amazon’s Antitrust Paradox abstract. Amazon is the titan of twenty-first century commerce. In addition to being a re- tailer, it is now a marketing platform, a delivery and logistics network, a payment service, a credit lender, an auction house, a major book publisher, a producer of television and films, a fashion designer, a hardware manufacturer, and a leading host of cloud server space. Although Amazon has clocked staggering growth, it generates meager profits, choosing to price below-cost and ex- pand widely instead. Through this strategy, the company has positioned itself at the center of e- commerce and now serves as essential infrastructure for a host of other businesses that depend upon it. Elements of the firm’s structure and conduct pose anticompetitive concerns—yet it has escaped antitrust scrutiny. This Note argues that the current framework in antitrust—specifically its pegging competi- tion to “consumer welfare,” defined as short-term price effects—is unequipped to capture the ar- chitecture of market power in the modern economy. We cannot cognize the potential harms to competition posed by Amazon’s dominance if we measure competition primarily through price and output. Specifically, current doctrine underappreciates the risk of predatory pricing and how integration across distinct business lines may prove anticompetitive. These concerns are height- ened in the context of online platforms for two reasons. First, the economics of platform markets create incentives for a company to pursue growth over profits, a strategy that investors have re- warded. Under these conditions, predatory pricing becomes highly rational—even as existing doctrine treats it as irrational and therefore implausible. -

Cygwin User's Guide
Cygwin User’s Guide Cygwin User’s Guide ii Copyright © Cygwin authors Permission is granted to make and distribute verbatim copies of this documentation provided the copyright notice and this per- mission notice are preserved on all copies. Permission is granted to copy and distribute modified versions of this documentation under the conditions for verbatim copying, provided that the entire resulting derived work is distributed under the terms of a permission notice identical to this one. Permission is granted to copy and distribute translations of this documentation into another language, under the above conditions for modified versions, except that this permission notice may be stated in a translation approved by the Free Software Foundation. Cygwin User’s Guide iii Contents 1 Cygwin Overview 1 1.1 What is it? . .1 1.2 Quick Start Guide for those more experienced with Windows . .1 1.3 Quick Start Guide for those more experienced with UNIX . .1 1.4 Are the Cygwin tools free software? . .2 1.5 A brief history of the Cygwin project . .2 1.6 Highlights of Cygwin Functionality . .3 1.6.1 Introduction . .3 1.6.2 Permissions and Security . .3 1.6.3 File Access . .3 1.6.4 Text Mode vs. Binary Mode . .4 1.6.5 ANSI C Library . .4 1.6.6 Process Creation . .5 1.6.6.1 Problems with process creation . .5 1.6.7 Signals . .6 1.6.8 Sockets . .6 1.6.9 Select . .7 1.7 What’s new and what changed in Cygwin . .7 1.7.1 What’s new and what changed in 3.2 . -
Buildsystems and What the Heck for We Actually Use the Autotools
Buildsystems and what the heck for we actually use the autotools Tom´aˇsChv´atal SUSE Packagers team 2013/07/19 Introduction Who the hell is Tom´aˇsChv´atal • SUSE Employee since 2011 - Team lead of packagers team • Packager of Libreoffice and various other stuff for openSUSE • openSUSE promoter and volunteer • Gentoo developer since fall 2008 3 of 37 Autotools process Complete autotools process 5 of 37 Make Why not just a sh script? Always recompiling everything is a waste of time and CPU power 7 of 37 Plain makefile example CC ?= @CC@ CFLAGS ?= @CFLAGS@ PROGRAM = examplebinary OBJ = main.o parser.o output.o $ (PROGRRAM) : $ (OBJ) $ (CC) $ (LDFLAGS) −o $@ $^ main.o: main.c common.h parser.o: parser.c common.h output.o: output.c common.h setup.h i n s t a l l : $ (PROGRAM) # You have to use tabs here $(INSTALL) $(PROGRAM) $(BINDIR) c l e a n : $ (RM) $ (OBJ) 8 of 37 Variables in Makefiles • Variables expanded using $(), ie $(VAR) • Variables are assigned like in sh, ie VAR=value • $@ current target • $<the first dependent file • $^all dependent files 9 of 37 Well nice, but why autotools then • Makefiles can get complex fast (really unreadable) • Lots of details to keep in mind when writing, small mistakes happen fast • Does not make dependencies between targets really easier • Automake gives you automatic tarball creation (make distcheck) 10 of 37 Autotools Simplified autotools process 12 of 37 Autoconf/configure sample AC INIT(example , 0.1, [email protected]) AC CONFIG HEADER([ config .h]) AC PROG C AC PROG CPP AC PROG INSTALL AC HEADER STDC AC CHECK HEADERS([string.h unistd.h limits.h]) AC CONFIG FILES([ Makefile doc/Makefile src/Makefile]) AC OUTPUT 13 of 37 Autoconf syntax • The M4 syntax is quite weird on the first read • It is not interpreted, it is text substitution machine • Lots of quoting is needed, if in doubt add more [] • Everything that does or might contain whitespace or commas has to be quoted • Custom autoconf M4 macros are almost unreadable 14 of 37 Automake bin PROGRAMS = examplebinary examplebinary SOURCES = n s r c /main . -
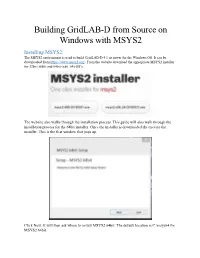
Building Gridlab-D from Source on Windows with MSYS2 Installing MSYS2: the MSYS2 Environment Is Used to Build Gridlab-D 4.1 Or Newer for the Windows OS
Building GridLAB-D from Source on Windows with MSYS2 Installing MSYS2: The MSYS2 environment is used to build GridLAB-D 4.1 or newer for the Windows OS. It can be downloaded from https://www.msys2.org/. From the website download the appropriate MSYS2 installer for 32bit (i686) and 64bit (x86_64) OS’s. The website also walks through the installation process. This guide will also walk through the installation process for the 64bit installer. Once the installer is downloaded the execute the installer. This is the first window that pops up. Click Next. It will then ask where to install MSYS2 64bit. The default location is C:\msys64 for MSYS2 64bit. Once the location has been specified click Next. Then it will ask where to create the program’s shortcuts. Use an existing one or create a new name. Once a destination is chosen click Next. At this point the installer begins to install MSYS2 onto the computer. Once installation is complete click Next. Then click Finish and installation is successful. Setting Up the MSYS2 Environment: To start the MSYS2 environment start msys2.exe. A window like below should pop up. As can be seen MSYS2 provides a Linux-like command terminal and environment for building GNU compliant C/C++ executables for Windows OS’s. When Running the MSYS2 environment for the first time updates will need to be performed. To perform update run $ pacman -Syuu Type “y” and hit enter to continue. If you get a line like the following: Simply close the MSYS2 window and restart the MSYS2 executable. -
Project-Team CONVECS
IN PARTNERSHIP WITH: Institut polytechnique de Grenoble Université Joseph Fourier (Grenoble) Activity Report 2016 Project-Team CONVECS Construction of verified concurrent systems IN COLLABORATION WITH: Laboratoire d’Informatique de Grenoble (LIG) RESEARCH CENTER Grenoble - Rhône-Alpes THEME Embedded and Real-time Systems Table of contents 1. Members :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 1 2. Overall Objectives :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 2 3. Research Program :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 2 3.1. New Formal Languages and their Concurrent Implementations2 3.2. Parallel and Distributed Verification3 3.3. Timed, Probabilistic, and Stochastic Extensions4 3.4. Component-Based Architectures for On-the-Fly Verification4 3.5. Real-Life Applications and Case Studies5 4. Application Domains ::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::5 5. New Software and Platforms :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 6 5.1. The CADP Toolbox6 5.2. The TRAIAN Compiler8 6. New Results :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: 8 6.1. New Formal Languages and their Implementations8 6.1.1. Translation from LNT to LOTOS8 6.1.2. Translation from LOTOS NT to C8 6.1.3. Translation from LOTOS to Petri nets and C9 6.1.4. NUPN 9 6.1.5. Translation from BPMN to LNT 10 6.1.6. Translation from GRL to LNT 10 6.1.7. Translation of Term Rewrite Systems 10 6.2. Parallel and Distributed Verification 11 6.2.1. Distributed State Space Manipulation 11 6.2.2. Distributed Code Generation for LNT 11 6.2.3. Distributed Resolution of Boolean Equation Systems 11 6.2.4. Stability of Communicating Systems 12 6.2.5. Debugging of Concurrent Systems 12 6.3. Timed, Probabilistic, and Stochastic Extensions 12 6.4. Component-Based Architectures for On-the-Fly Verification 13 6.4.1. -
GNU/Linux for Admins
KNOPPERKNOPPER.NET.NET Dipl.-Ing. Klaus Knopper Linux-Administration Zusammengestellt fur¨ die FH Kaiserslautern/Zweibrucken¨ im Marz¨ 2006 •First •Prev •Next •Last •Full Screen •Quit c 2006 Klaus Knopper Erstellt fur:¨ FH Kaiserslautern/Zweibrucken¨ Folie 1 von ?? KNOPPERKNOPPER.NET.NET Dipl.-Ing. Klaus Knopper Zusammenfassung Linux ist ein leistungsfahiges,¨ stabiles und außerst¨ um- fangreiches Betriebssystem. Im Rahmen dieses Kur- ses sollen die grundlegenden Merkmale von Linux als Server-Plattform, insbesondere die Einrichtung und Wartung haufig¨ genutzter Serverdienste erlautert¨ so- wie ein Einblick in die wichtigsten Konfigurations- und Administrationsaufgaben des Linux-Administrators ge- geben werden. •First •Prev •Next •Last Folie 1 •Full Screen •Quit c 2006 Klaus Knopper Erstellt fur:¨ FH Kaiserslautern/Zweibrucken¨ Folie 2 von ?? KNOPPERKNOPPER.NET.NET Dipl.-Ing. Klaus Knopper Ein wenig Geschichte 1970- Erste Unix-Betriebssysteme auf Großrechnern, vor allem an Universitaten.¨ 1988- POSIX 1003.1 als Standard verabschiedet. 1993- Linus Torvalds gibt den Quelltext fur¨ Kernel 0.1 frei. Das System wird zusammen mit der GNU-Software der Free Software Foundation von vielen Entwicklern weltweit uber¨ das Internet weiterentwickelt. heute- “Linux World Domination“? (Im Einsatz als kleines und mittleres Server-System auf kostengunstigen¨ PCs im Intranet/Internet-Bereich bereits erreicht.) •First •Prev •Next •Last Folie 2 •Full Screen •Quit c 2006 Klaus Knopper Erstellt fur:¨ FH Kaiserslautern/Zweibrucken¨ Folie 3 von ?? KNOPPERKNOPPER.NET.NET Dipl.-Ing. Klaus Knopper Die GNU General Public License Gibt den Empfangern¨ der Software das Recht, ohne Lizenzgebuhren¨ • den Quelltext zur Software zu erhalten, um diese analysieren und nach eigenen Wunschen¨ modifizieren zu konnen,¨ • die Software in beliebiger Anzahl zu kopieren, • die Software zu modifizieren (s.o.), • die Software im Original oder in einer modifizierten Version weiterzugeben oder zu verkaufen, auch kommerziell, wobei die Empfanger¨ der Software diese ebenfalls unter den Konditionen der GPL erhalten. -

Technical Computing on the OS … That Is Not Linux! Or How to Leverage Everything You‟Ve Learned, on a Windows Box As Well
Tools of the trade: Technical Computing on the OS … that is not Linux! Or how to leverage everything you‟ve learned, on a Windows box as well Sean Mortazavi & Felipe Ayora Typical situation with TC/HPC folks Why I have a Windows box How I use it It was in the office when I joined Outlook / Email IT forced me PowerPoint I couldn't afford a Mac Excel Because I LIKE Windows! Gaming It's the best gaming machine Technical/Scientific computing Note: Stats completely made up! The general impression “Enterprise community” “Hacker community” Guys in suits Guys in jeans Word, Excel, Outlook Emacs, Python, gmail Run prepackaged stuff Builds/runs OSS stuff Common complaints about Windows • I have a Windows box, but Windows … • Is hard to learn… • Doesn‟t have a good shell • Doesn‟t have my favorite editor • Doesn‟t have my favorite IDE • Doesn‟t have my favorite compiler or libraries • Locks me in • Doesn‟t play well with OSS • …. • In summary: (More like ) My hope … • I have a Windows box, and Windows … • Is easy to learn… • Has excellent shells • Has my favorite editor • Supports my favorite IDE • Supports my compilers and libraries • Does not lock me in • Plays well with OSS • …. • In summary: ( or at least ) How? • Recreating a Unix like veneer over windows to minimize your learning curve • Leverage your investment in know how & code • Showing what key codes already run natively on windows just as well • Kicking the dev tires using cross plat languages Objective is to: Help you ADD to your toolbox, not take anything away from it! At a high level… • Cygwin • SUA • Windowing systems “The Unix look & feel” • Standalone shell/utils • IDE‟s • Editors General purpose development • Compilers / languages / Tools • make • Libraries • CAS environments Dedicated CAS / IDE‟s And if there is time, a couple of demos… Cygwin • What is it? • A Unix like environment for Windows. -

Open Source Magazine N°13
Actualité édito =VhiVaVK^hiVWVWn erci Microsoft ! Merci Ce système de substitution à L’arrivée récente de Vista de de migrer leurs postes PC sous Apple ! Et surtout mer- Mac OS X d’Apple et à Windows Microsoft a donné un nou- Windows vers Mac OS X ou B ci Canonical ! Grâce à de Microsoft était relativement veau coup d’accélérateur à la Linux (selon King Research). vous, les solutions li- peu recherché par le commun diffusion de Linux notamment Ce n’est plus « l’effet halo » si bres connaissent un incroyable des mortels jusqu’à ce que la Ubuntu (et à ses variantes : cher à Apple mais bel et bien succès auprès des passionnés firme sud-africaine Canonical Kubunu, Edubuntu, Xubuntu, « l’effet Vista » ! d’informatique et des utilisa- ne se lance dans la distribution etc) en raison des problèmes Enfin et surtout, le monde du teurs près de leurs sous. gratuite d’Ubuntu sa propre rencontrés avec la nouvelle libre ne serait rien sans la phi- Les mauvais « gestes commer- distribution basée sur Debian, version du système d’exploi- losophie de l’open-source qui ciaux » de Microsoft et d’Apple un dérivé de Linux. tation de Microsoft. En 2007, permet à tout programmeur conduisent de plus en plus les le groupe automobiles PSA a d’apporter, gracieusement, utilisateurs à tester d’abord des Canonical a recherché la sim- migré ses 20 000 postes vers des améliorations à un logiciel logiciels libres alternatifs com- plicité, la clarté, la compatibili- Linux ainsi que l’Assemblée Na- ouvert et de les proposer à l’en- me le navigateur Firefox de la té et la stabilité. -
Perl on Windows
BrokenBroken GlassGlass Perl on Windows Chris 'BinGOs' Williams “This is your last chance. After this, there is no turning back. You take the blue pill - the story ends, you wake up in your bed and believe whatever you want to believe. You take the red pill - you stay in Wonderland and I show you how deep the rabbit-hole goes.” A bit of history ● 5.003_24 - first Windows port ● 5.004 - first Win32 and Cygwin support, [MSVC++ and Borland C++] ● 5.005 - experimental threads, support for GCC and EGCS ● 5.6.0 - experimental fork() support ● 5.8.0 - proper ithreads, fork() support, 64bit Windows [Intel IA64] ● 5.8.1 - threads support for Cygwin ● 5.12.0 - AMD64 with Mingw gcc ● 5.16.0 - buh-bye Borland C++ Time for some real archaeology Windows NT 4.0 Resource Kit CDROM ActivePerl http://www.activestate.com/perl ● July 1998 - ActivePerl 5.005 Build 469 ● March 2000 - ActivePerl 5.6.0 Build 613 ● November 2002 - ActivePerl 5.8.0 Build 804 ● November 2005 - ActivePerl 5.8.7 Build 815 [Mingw compilation support] ● August 2006 - ActivePerl 5.8.8 Build 817 [64bit] ● June 2012 - ActivePerl 5.16.0 Build 1600 ● Built with MSVC++ ● Can install or use MinGW ● PPM respositories of popular modules ● Commercial support ● PerlScript – Active Scripting engine ● Perl ISAPI Strawberry Perl http://strawberryperl.com ● July 2006 - Strawberry Perl 5.8.8 Alpha 1 released ● April 2008 - Strawberry Perl 5.10.0.1 and 5.8.8.1 released ● January 2009 - first portable release ● April 2010 - 64bit and 32bit releases ● May 2012 - Strawberry Perl 5.16.0.1 released ● August -
Libreoffice Magazine Brasil Diagramado No Libreoffice Draw EDITORIAL
Magazine Ano 1 - Edição 1 Outubro de 2012 Caso de uso: LibreOffice na Secretaria de Segurança do Rio de Janeiro Light Proof a nova sensação Tutorial: do LibreOffice Desenvolvendo Entrevistas com Extensões Basic desenvolvedores do LibreOffice e e c c e e n n a a i i r r o o t t c c i Artigos | Dicas | Tutoriais | e muito mais... i V V LibreOffice Magazine Brasil Diagramado no LibreOffice Draw EDITORIAL Sobre partos e renascimentos Editores No mês de setembro comemoramos dois anos de criação da The Eliane Domingos de Sousa Document Foundation. Sinto-me particularmente agradecido por ter Olivier Hallot Vera Cavalcante embarcado em uma aventura de alto risco, mas com a convicção que era a coisa certa a ser feita em 2010. Com um capital intelectual Redação: vasto sobre uma tecnologia que estava ainda mostrando seus frutos, Ana Cristina Geyer Moraes fiquei receoso dos rumos tomados pela empresa que mantinha o Eliane Domingos de Sousa OpenOffice.org em uma camisa de força que o impedia de evoluir no José Carlos de Oliveira compasso que o mercado exigia de uma suíte office que almeja a Klaibson Ribeiro maturidade. Michael Meeks Na época, eu era membro eleito do Conselho da Comunidade, Noelson Alves Duarte composto por alguns representantes das comunidades mundo afora, Raimundo Santos Moura e uma maioria de funcionários do principal patrocinador. Na reunião Raul Pacheco da Silva anual do Conselho, com a participação do principal executivo do Swapnil Bhartiya projeto OpenOffice.org da empresa, soubemos que a participação da comunidade não era estratégica para os objetivos empresariais e que Tradução a condução do projeto seria feita pela empresa a revelia da David Jourdain comunidade. -

Mobile Cloud Based Compiler : a Novel Framework for Academia
International Journal of Advancements in Research & Technology, Volume 2, Issue4, April‐2013 445 ISSN 2278‐7763 Mobile Cloud based Compiler : A Novel Framework For Academia Mahendra Mehra, Kailas.k.Devadkar, Dhananjay Kalbande 1Computer Engineering, Sardar Patel Institute of Technology, Mumbai, India; 2 Computer Engineering, Sardar Patel Institute of Technology, Mum- bai, India. Email: [email protected], [email protected], [email protected] ABSTRACT Cloud computing is a rising technology which enables convenient, on-demand network access to a shared pool of configurable computing resources. Mobile cloud computing is the availability of cloud computing services in a mobile ecosystem. Mobile cloud computing shares with cloud computing the notion that services is provided by a cloud and accessed through mobile plat- forms. The paper aims to describe an online mobile cloud based compiler which helps to reduce the problems of portability and storage space and resource constraints by making use of the concept of mobile cloud computing. The ability to use compiler ap- plication on mobile devices allows a programmer to get easy access of the code and provides most convenient tool to compile the code and remove the errors. Moreover, a mobile cloud based compiler can be used remotely throughout any network con- nection (WI-FI/ GPRS) on any Smartphone. Thus, avoiding installation of compilers on computers and reducing the dependen- cy on computers to write and execute programs. Keywords: Mobile cloud computing; mobile web services; JASON; Compiler; Academia 1 INTRODUCTION The classroom is changing. From the time school bell rings to smartphones, and desktops. The cloud helps ensure that stu- study sessions that last well into the night, students and facul- dents, teachers, faculty, parents, and staff have on-demand ty are demanding more technology services from their access to critical information using any device from any- schools. -

SPI Annual Report 2015
Software in the Public Interest, Inc. 2015 Annual Report July 12, 2016 To the membership, board and friends of Software in the Public Interest, Inc: As mandated by Article 8 of the SPI Bylaws, I respectfully submit this annual report on the activities of Software in the Public Interest, Inc. and extend my thanks to all of those who contributed to the mission of SPI in the past year. { Martin Michlmayr, SPI Secretary 1 Contents 1 President's Welcome3 2 Committee Reports4 2.1 Membership Committee.......................4 2.1.1 Statistics...........................4 3 Board Report5 3.1 Board Members............................5 3.2 Board Changes............................6 3.3 Elections................................6 4 Treasurer's Report7 4.1 Income Statement..........................7 4.2 Balance Sheet............................. 13 5 Member Project Reports 16 5.1 New Associated Projects....................... 16 5.2 Updates from Associated Projects................. 16 5.2.1 0 A.D.............................. 16 5.2.2 Chakra............................ 16 5.2.3 Debian............................. 17 5.2.4 Drizzle............................. 17 5.2.5 FFmpeg............................ 18 5.2.6 GNU TeXmacs........................ 18 5.2.7 Jenkins............................ 18 5.2.8 LibreOffice.......................... 18 5.2.9 OFTC............................. 19 5.2.10 PostgreSQL.......................... 19 5.2.11 Privoxy............................ 19 5.2.12 The Mana World....................... 19 A About SPI 21 2 Chapter 1 President's Welcome SPI continues to focus on our core services, quietly and competently supporting the activities of our associated projects. A huge thank-you to everyone, particularly our board and other key volun- teers, whose various contributions of time and attention over the last year made continued SPI operations possible! { Bdale Garbee, SPI President 3 Chapter 2 Committee Reports 2.1 Membership Committee 2.1.1 Statistics On January 1, 2015 we had 512 contributing and 501 non-contributing mem- bers.