Bayesian Sensitivity Analysis of Flight Parameters in a Hard-Landing Analysis Process
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Orientation Sheet for Horizon Updated: 2017-Apr-21
Orientation Sheet for Horizon Updated: 2017-Apr-21 General • All voyages should be documented in the ship’s log book. Report any damage or deficiencies to [email protected] and to boat manager [email protected] / 410-203-2673 Specifications Registration #: MD 5596 AC Hull#: XLY 595267 Make: Islander 36 Year: 1977 Engine: Perkins 4.108; 4-cyl Diesel 48-HP Displacement: 13,450 lbs Draft: 5’ 02” Mast Height Fuel Capacity: 30 gal. Holding tank: 18 gal. (from waterline): 52’ 06” Water Capacity: 54 gal. 2 tanks, below Salon Settees LOA: 36’ 08" Batteries: House battery 1 and 2 (Starboard lazaret) LWL: 28’ 25” Starting Battery (under companionway steps) Beam: 11’ 17” Sails: Main, Genoa on furler, staysail with boom Safety Equipment First Aid Kit: Drawer port side Rescue Sling: Stern Rail PFDs: V-berth Fire Extinguishers: (2) – Starboard side cabin, Port quater berth Day/Night Flares: Aerial & Hand-held – Drawer port side above seats in salon Sounds (Horn, Bell & Whistle): Drawer port side above seats in salon Auto-Switched Bilge Pump: Wired directly to House Battery (must be switched to Auto when leaving boat). The switch is located on the starboard side inside the cabin above the galley sink Old Bilge Pump: Wired to Electric Panel on the engine compartment wall (manual mode only). Do not use this pump unless the other one is not working. Manual Bilge Pump: Cockpit Port side (handle located in drawer port side above seats) Anchors: Danforth (35 lbs) bow; Rode: 15’ of chain & 150’ of line (marked every 30’) Thru-hulls/Sea-cocks: Engine -
Industry at the Edge of Space Other Springer-Praxis Books of Related Interest by Erik Seedhouse
IndustryIndustry atat thethe EdgeEdge ofof SpaceSpace ERIK SEEDHOUSE S u b o r b i t a l Industry at the Edge of Space Other Springer-Praxis books of related interest by Erik Seedhouse Tourists in Space: A Practical Guide 2008 ISBN: 978-0-387-74643-2 Lunar Outpost: The Challenges of Establishing a Human Settlement on the Moon 2008 ISBN: 978-0-387-09746-6 Martian Outpost: The Challenges of Establishing a Human Settlement on Mars 2009 ISBN: 978-0-387-98190-1 The New Space Race: China vs. the United States 2009 ISBN: 978-1-4419-0879-7 Prepare for Launch: The Astronaut Training Process 2010 ISBN: 978-1-4419-1349-4 Ocean Outpost: The Future of Humans Living Underwater 2010 ISBN: 978-1-4419-6356-7 Trailblazing Medicine: Sustaining Explorers During Interplanetary Missions 2011 ISBN: 978-1-4419-7828-8 Interplanetary Outpost: The Human and Technological Challenges of Exploring the Outer Planets 2012 ISBN: 978-1-4419-9747-0 Astronauts for Hire: The Emergence of a Commercial Astronaut Corps 2012 ISBN: 978-1-4614-0519-1 Pulling G: Human Responses to High and Low Gravity 2013 ISBN: 978-1-4614-3029-2 SpaceX: Making Commercial Spacefl ight a Reality 2013 ISBN: 978-1-4614-5513-4 E r i k S e e d h o u s e Suborbital Industry at the Edge of Space Dr Erik Seedhouse, M.Med.Sc., Ph.D., FBIS Milton Ontario Canada SPRINGER-PRAXIS BOOKS IN SPACE EXPLORATION ISBN 978-3-319-03484-3 ISBN 978-3-319-03485-0 (eBook) DOI 10.1007/978-3-319-03485-0 Springer Cham Heidelberg New York Dordrecht London Library of Congress Control Number: 2013956603 © Springer International Publishing Switzerland 2014 This work is subject to copyright. -

EDL – Lessons Learned and Recommendations
."#!(*"# 0 1(%"##" !)"#!(*"#* 0 1"!#"("#"#(-$" ."!##("""*#!#$*#( "" !#!#0 1%"#"! /!##"*!###"#" #"#!$#!##!("""-"!"##&!%%!%&# $!!# %"##"*!%#'##(#!"##"#!$$# /25-!&""$!)# %"##!""*&""#!$#$! !$# $##"##%#(# ! "#"-! *#"!,021 ""# !"$!+031 !" )!%+041 #!( !"!# #$!"+051 # #$! !%#-" $##"!#""#$#$! %"##"#!#(- IPPW Enabled International Collaborations in EDL – Lessons Learned and Recommendations: Ethiraj Venkatapathy1, Chief Technologist, Entry Systems and Technology Division, NASA ARC, 2 Ali Gülhan , Department Head, Supersonic and Hypersonic Technologies Department, DLR, Cologne, and Michelle Munk3, Principal Technologist, EDL, Space Technology Mission Directorate, NASA. 1 NASA Ames Research Center, Moffett Field, CA [email protected]. 2 Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR), German Aerospace Center, [email protected] 3 NASA Langley Research Center, Hampron, VA. [email protected] Abstract of the Proposed Talk: One of the goals of IPPW has been to bring about international collaboration. Establishing collaboration, especially in the area of EDL, can present numerous frustrating challenges. IPPW presents opportunities to present advances in various technology areas. It allows for opportunity for general discussion. Evaluating collaboration potential requires open dialogue as to the needs of the parties and what critical capabilities each party possesses. Understanding opportunities for collaboration as well as the rules and regulations that govern collaboration are essential. The authors of this proposed talk have explored and established collaboration in multiple areas of interest to IPPW community. The authors will present examples that illustrate the motivations for the partnership, our common goals, and the unique capabilities of each party. The first example involves earth entry of a large asteroid and break-up. NASA Ames is leading an effort for the agency to assess and estimate the threat posed by large asteroids under the Asteroid Threat Assessment Project (ATAP). -

Gannet Electronics
Gannet Electronics A Summary of the Electronic Equipment Fitted to early Model R.A.N Gannet A.S.1 Aircraft Prepared by David Mowat Ex-L.R.E.M.(A) 21st. August 2003 Page 1 Page 2 GANNET ELECTRONIC EQUIPMENT Introduction The ‘Heart’ of the Gannet as a Weapons System was its Electronic Equipment. It contained a comprehensive range of electronic equipment to enable it to perform the various roles for which it was designed. Its Primary Role was to detect, locate, and destroy enemy submarines. For this Role, the Aircraft was fitted with a Search Radar and Sonobuoy Systems. Other electronic systems were also installed for Communications, both internal and external, and Navigation. The various equipments were allocated an ‘Aircraft Radio Installation’ (ARI) number, which specified the actual equipment used in each installation. These may vary between aircraft depending on the role that the particular aircraft was to perform. A cross- reference List of ARI’s is shown at Appendix ‘A’. The various equipments can be grouped into four major categories as follows: a.! Communications b.! Navigation c.! Warfare Systems d.! Stores Communications Equipment The Communications Equipment was used to enable the crew to talk to each other (internal communications) and other aircraft, ships or bases (external communications). They are as follows: a.! Audio Amplifier Type A1961 The Type A1921 was used to amplify the Microphone outputs from the three crew members and feed it back into the earphones. It was located on the port side of the rear cockpit at about seat height just forward of the Radio Operator. -

19750827-0 DC-3 5Y-AAF.Pdf
1 CAV/ACC/24/75 ACCIDENT IUVESTIGATION BRANCH CIVIL AIRCRAFT ACCIDEiiT Report on the Accident to Douglas DC-3 Aircraft Registration number 5Y-AAF which occurred on the 27th August,1975 At 0922 hours, at Mtwara Airport, Tanzania. E A S T A F R I CAN C 0 M M U NIT Y AOCIDEwr REPORT AOCIDE:~T INVESTIGATIOn BRAl'WH 'CIVIL ACCIDENT REPORT CAV/ACC/24/75 AIRCRAFT TYPE 8; HEGISTRATION: Douglas DC-::- 5Y-l~ ENGINE: Pratt & \filii tney R1830-90D REGISTERED OWlIJ]~R & OPERATOR: East African Airways Corporation, P.O. Box 19002, NAIROBI, Kenya. CREVf: CAPTAIN Gabriel Sebastian Turuka ) ) Uninjured FIJ:1ST OFFICER Steven Robert Wegoye ) PASSENGER: Sixteen - Uninjured. PLACE OF ACCIDEHT: ~,1twara Airport, Tanzania. DATE AND T1MB: 27th August, 1975, 0922 hours. ALL rrU'lES IN THIS REPORT ARE G.1VI. T. SUMMARY The aircraft was operating East African Airways Service flight number EC037 from Dar es Salaam to Nachingmea with an unscheduled refuelling stop at I1twara with 3 crew and 16 passengers on board. The flight from Dar es Salaam was uneventful and an approach and landing was made onto runway 19. After touch down the aircraft swung to the left and then to the right, after which it left the runway where both main landing gear assys collapsed causing substantial daLage to the centre section and nacelle structure. The report concludes that the most probable cause of the accident was the failure of the pilot to initiate corrective action to prevent the aircraft from turning off the runway. 1.1 HISTORY OF THE FLIGHT: The aircraft departed Dar es Salaam with three crew and 16 passengers. -

Reusable Rocket Upper Stage Development of a Multidisciplinary Design Optimisation Tool to Determine the Feasibility of Upper Stage Reusability L
Reusable Rocket Upper Stage Development of a Multidisciplinary Design Optimisation Tool to Determine the Feasibility of Upper Stage Reusability L. Pepermans Technische Universiteit Delft Reusable Rocket Upper Stage Development of a Multidisciplinary Design Optimisation Tool to Determine the Feasibility of Upper Stage Reusability by L. Pepermans to obtain the degree of Master of Science at the Delft University of Technology, to be defended publicly on Wednesday October 30, 2019 at 14:30 AM. Student number: 4144538 Project duration: September 1, 2018 – October 30, 2019 Thesis committee: Ir. B.T.C Zandbergen , TU Delft, supervisor Prof. E.K.A Gill, TU Delft Dr.ir. D. Dirkx, TU Delft This thesis is confidential and cannot be made public until October 30, 2019. An electronic version of this thesis is available at http://repository.tudelft.nl/. Cover image: S-IVB upper stage of Skylab 3 mission in orbit [23] Preface Before you lies my thesis to graduate from Delft University of Technology on the feasibility and cost-effectiveness of reusable upper stages. During the accompanying literature study, it was determined that the technology readiness level is sufficiently high for upper stage reusability. However, it was unsure whether a cost-effective system could be build. I have been interested in the field of Entry, Descent, and Landing ever since I joined the Capsule Team of Delft Aerospace Rocket Engineering (DARE). During my time within the team, it split up in the Structures Team and Recovery Team. In September 2016, I became Chief Recovery for the Stratos III student-built sounding rocket. During this time, I realised that there was a lack of fundamental knowledge in aerodynamic decelerators within DARE. -

Drivetrain 17 36 30 30 31 32 32 33 35 37 38 39 39 40 40 41 41 41 41 41 40 36-40
B Drivetrain ............................... 18 to 41 Drivetrain Struts Main .............................................................................18-19 Self-aligning gland type (with space) ................................. 30 Intermediate ...................................................................... 18 Heavy duty ..................................................................... 30 Sailboat ............................................................................. 19 Studs .................................................................................. 31 Port and starboard ............................................................ 20 Tournament (with space) ................................................ 32 Vee .................................................................................... 21 Self-aligning gland type (without space) ............................ 32 Universal ........................................................................... 21 Spud type Adjustable ....................................................................22-23 Tournament water cooled ............................................... 33 Cut off type ..................................................................... 22 Right hand thread ........................................................... 35 Swivel type ..................................................................... 23 Shaft logs..........................................................................36-40 Strut bolts ............................................................................. -

Bureau of Air Safety Investigation Report Basi
BUREAU OF AIR SAFETY INVESTIGATION REPORT BASI Report B/916/1017 Bell 214ST Helicopter VH-HOQ Timor Sea Latitude 12° 30' south Longitude 124° 25' east 22 November 1991 Bureau of Air Safety Investigation /i.:V Transport and Healonaf Development Department of Transport and Communications Bureau of Air Safety Investigation ACCIDENT INVESTIGATION REPORT B/916/1017 Bell 214ST Helicopter VH-HOQ Timor Sea Latitude 12° 30' south Longitude 124° 25' east 22 November 1991 Released by the Director of the Bureau of Air Safety Investigation under the provisions of Air Navigation Regulation 283 Bureau of Air Safety Investigation When the Bureau makes recommendations as a result of its investigations or research, safety, (in accordance with our charter), is our primary consideration. However, the Bureau fully recognises that the implementation of recommendations arising from its investigations will in some cases incur a cost to the industry. Consequently, the Bureau always attempts to ensure that common sense applies whenever recommendations are formulated. BASI does not have the resources to carry out a full cost- benefit analysis of every recommendation. The cost of any recommendation must always be balanced against its benefits to safety, and aviation safety involves the whole community. Such analysis is a matter for the CAA and the industry. ISBN 0642 193959 June 1993 This report was produced by the Bureau of Air Safety Investigation (BASI), PO Box 967, Civic Square ACT 2608. The Director of the Bureau authorised the investigation and the publication of this report pursuant to his delegated powers conferred by Air Navigation Regulations 278 and 283 respectively. -

A I -Fligat INVESTIGATIUN N83-13110 of PILOT-INDUCED
1983004840 (H&SA-CS-163116) A_ I_-FLIGaT INVESTIGATIUN N83-13110 OF PILOT-INDUCED OSCILLATION SUPPRESSIO_ FILTERS _JflING TtI_ FIGHTER APP_O&CH AND LANDING TASK (Calspan Corp., B_ffalo, N.Y.) Haclas 147 p HC AO7/MF AO| CSCL 01C G3/08 01450 NASA Contractor Report 16x_16 AN IN"FUQHT INVEST'RATION OF PILOT-INDUCED OSCILLATION SUPPRESSION FILTERS DURING THE FIGHTER AI_;_OACH AND LANDING TASK J R. E. Bailey and R. E. Smith CNarchontract 1982F336! 5-79-C--3618 . _Si_;_ _ -] i t ° t" ' Nal_c,na I Ae'onaut,c_ and Sl:)aceAdm,n,strabor" t j ', 1983004840-002 ._ASA Contractor Report 163116 • AN EqI-FLI_'IT INVESTIGATION OF PlLOT,-EIXJICi[D 08¢LL,ATION SUPPImESINONFILI'I[I_ _ THE FIGHTER _ACH AND LANDING TASK R. E. Bailey and R. E. Smith Calspan Advanced Technology Center Buffalo, New York Prepared for Ames Research Center Hugh L. Dryden Research Facility under Contract F33615-79-C-3618 • Nal_ona I Aeronaulics and Spa( e Administration Scientific a_IdTechnical Information Office 1982 1983004840-003 FOREWORD This report was prepared for the National Aeronautics and Space Administration by Calspan Corporation, Buffalo, New York, in partial fulfill- ment of USA/=Contract No. F35615-79-C-3618• This report describes an in-flight investigati , of the effects of pilot-induced oscillation filters on the long- " itudinal flying qualities of fighter aircraft during the landing task• The in-flight program reported herein was performed by the Flight • Research Department of Calspan under sponsorship of the NASA/Dryden Flight Research Center, Edwards, California, working through a Calspan contract with the Flight Dynamics Laboratory of the Air Force Wright Aeronautical Labora- tory, Wright-Patterson Air Force Base, Ohio. -

WO 2015/012935 A2 29 January 2015 (29.01.2015) P O P C T
(12) INTERNATIONAL APPLICATION PUBLISHED UNDER THE PATENT COOPERATION TREATY (PCT) (19) World Intellectual Property Organization International Bureau (10) International Publication Number (43) International Publication Date WO 2015/012935 A2 29 January 2015 (29.01.2015) P O P C T (51) International Patent Classification: Bart Dean [US/US]; 2691 Daunet Ave., Simi Valley, Cali B64C 27/26 (2006.01) B64C 27/54 (2006.01) fornia 93065 (US). PARKS, William Martin [US/US]; B64C 5/02 (2006.01) B64C 39/02 (2006.01) 2805 North Woodrow Ave., Simi Valley, California 93065 B64C 9/00 (2006.01) G05D 1/08 (2006.01) (US). GANZER, David Wayne [US/US]; 4607 Kleberg B64C 25/00 (2006.01) B64C 29/00 (2006.01) St., Simi Valley, California 93063 (US). FISHER, Chris¬ topher Eugene [US/US]; 4 1 Los Vientos Dr., Thousand (21) International Application Number: Oaks, California 91320 (US). MUKHERJEE, Jason Sid- PCT/US20 14/036863 harthadev [US/US]; 605 Muirfield Ave., Simi Valley, (22) International Filing Date: California 93065 (US). KING, Joseph Frederick 5 May 2014 (05.05.2014) [US/US]; 10540 Gaviota Ave., Granada Hills, California 91344 (US). (25) Filing Language: English (74) Agent: DAWSON, James K.; 1445 E. Los Angeles Ave., English (26) Publication Language: Suite 108, Simi Valley, California 93065-2827 (US). (30) Priority Data: (81) Designated States (unless otherwise indicated, for every 3 May 2013 (03.05.2013) 61/819,487 US kind of national protection available): AE, AG, AL, AM, (71) Applicant: AEROVIRONMENT, INC. [US/US]; 181 W . AO, AT, AU, AZ, BA, BB, BG, BH, BN, BR, BW, BY, Huntington Drive, Suite 202, Monrovia, California 91016 BZ, CA, CH, CL, CN, CO, CR, CU, CZ, DE, DK, DM, (US). -

Chapter 3 Aircraft Accident and Serious Incident Investigations
Chapter 3 Aircraft accident and serious incident investigations Chapter 3 Aircraft accident and serious incident investigations 1 Aircraft accidents and serious incidents to be investigated <Aircraft accidents to be investigated> ◎Paragraph 1, Article 2 of the Act for Establishment of the Japan Transport Safety Board (Definition of aircraft accident) The term "Aircraft Accident" as used in this Act shall mean the accident listed in each of the items in paragraph 1 of Article 76 of the Civil Aeronautics Act. ◎Paragraph 1, Article 76 of the Civil Aeronautics Act (Obligation to report) 1 Crash, collision or fire of aircraft; 2 Injury or death of any person, or destruction of any object caused by aircraft; 3 Death (except those specified in Ordinances of the Ministry of Land, Infrastructure, Transport and Tourism) or disappearance of any person on board the aircraft; 4 Contact with other aircraft; and 5 Other accidents relating to aircraft specified in Ordinances of the Ministry of Land, Infrastructure, Transport and Tourism. ◎Article 165-3 of the Ordinance for Enforcement of the Civil Aeronautics Act (Accidents related to aircraft prescribed in the Ordinances of the Ministry of Land, Infrastructure, Transport and Tourism under item 5 of the paragraph1 of the Article 76 of the Act) The cases (excluding cases where the repair of a subject aircraft does not correspond to the major repair work) where navigating aircraft is damaged (except the sole damage of engine, cowling, engine accessory, propeller, wing tip, antenna, tire, brake or fairing). <Aircraft serious incidents to be investigated> ◎Item 2, Paragraph 2, Article 2 of the Act for Establishment of the Japan Transport Safety Board (Definition of aircraft serious incident) A situation where a pilot in command of an aircraft during flight recognized a risk of collision or contact with any other aircraft, or any other situations prescribed by the Ordinances of Ministry of Land, Infrastructure, Transport and Tourism under Article 76-2 of the Civil Aeronautics Act. -
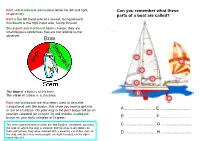
Sailing Terms Into the Wind, but We Can Start Sailing from About 30 Degrees Away from the Wind
Port and starboard are nautical terms for left and right, Can you remember what these respectively. parts of a boat are called? Port is the left-hand side of a vessel, facing forward. Starboard is the right-hand side, facing forward. Since port and starboard never change, they are unambiguous references that are not relative to the observer. Bow The bow of a boat is at the front The stern of a boat is at the back Port and starboard are also terms used to describe navigational aids like buoys, that show you how to get into A …...................... E …...................... or out of a harbour. On your way in the port buoys will be on your left coloured (or at night, lit) red and the starboard buoys on your right coloured or lit green. B …...................... F …...................... The term starboard derives from the Old English 'steorbord', meaning C …...................... G …...................... the side on which the ship is steered. Before ships had rudders on their centrelines, they were steered with a steering oar at the stern of D …...................... H …...................... the ship and, because more people are right-handed, on the right- hand side of it. When we're sailing a boat we always want to know An introduction to where the wind is coming from. We can't sail straight sailing terms into the wind, but we can start sailing from about 30 degrees away from the wind. Each 'point of sail' has a When you first come out sailing you'll discover a whole name according to the angle away from the wind.