Trawl Positioning System User Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Orientation Sheet for Horizon Updated: 2017-Apr-21
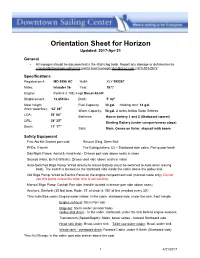
Orientation Sheet for Horizon Updated: 2017-Apr-21 General • All voyages should be documented in the ship’s log book. Report any damage or deficiencies to [email protected] and to boat manager [email protected] / 410-203-2673 Specifications Registration #: MD 5596 AC Hull#: XLY 595267 Make: Islander 36 Year: 1977 Engine: Perkins 4.108; 4-cyl Diesel 48-HP Displacement: 13,450 lbs Draft: 5’ 02” Mast Height Fuel Capacity: 30 gal. Holding tank: 18 gal. (from waterline): 52’ 06” Water Capacity: 54 gal. 2 tanks, below Salon Settees LOA: 36’ 08" Batteries: House battery 1 and 2 (Starboard lazaret) LWL: 28’ 25” Starting Battery (under companionway steps) Beam: 11’ 17” Sails: Main, Genoa on furler, staysail with boom Safety Equipment First Aid Kit: Drawer port side Rescue Sling: Stern Rail PFDs: V-berth Fire Extinguishers: (2) – Starboard side cabin, Port quater berth Day/Night Flares: Aerial & Hand-held – Drawer port side above seats in salon Sounds (Horn, Bell & Whistle): Drawer port side above seats in salon Auto-Switched Bilge Pump: Wired directly to House Battery (must be switched to Auto when leaving boat). The switch is located on the starboard side inside the cabin above the galley sink Old Bilge Pump: Wired to Electric Panel on the engine compartment wall (manual mode only). Do not use this pump unless the other one is not working. Manual Bilge Pump: Cockpit Port side (handle located in drawer port side above seats) Anchors: Danforth (35 lbs) bow; Rode: 15’ of chain & 150’ of line (marked every 30’) Thru-hulls/Sea-cocks: Engine -

Gannet Electronics
Gannet Electronics A Summary of the Electronic Equipment Fitted to early Model R.A.N Gannet A.S.1 Aircraft Prepared by David Mowat Ex-L.R.E.M.(A) 21st. August 2003 Page 1 Page 2 GANNET ELECTRONIC EQUIPMENT Introduction The ‘Heart’ of the Gannet as a Weapons System was its Electronic Equipment. It contained a comprehensive range of electronic equipment to enable it to perform the various roles for which it was designed. Its Primary Role was to detect, locate, and destroy enemy submarines. For this Role, the Aircraft was fitted with a Search Radar and Sonobuoy Systems. Other electronic systems were also installed for Communications, both internal and external, and Navigation. The various equipments were allocated an ‘Aircraft Radio Installation’ (ARI) number, which specified the actual equipment used in each installation. These may vary between aircraft depending on the role that the particular aircraft was to perform. A cross- reference List of ARI’s is shown at Appendix ‘A’. The various equipments can be grouped into four major categories as follows: a.! Communications b.! Navigation c.! Warfare Systems d.! Stores Communications Equipment The Communications Equipment was used to enable the crew to talk to each other (internal communications) and other aircraft, ships or bases (external communications). They are as follows: a.! Audio Amplifier Type A1961 The Type A1921 was used to amplify the Microphone outputs from the three crew members and feed it back into the earphones. It was located on the port side of the rear cockpit at about seat height just forward of the Radio Operator. -

19750827-0 DC-3 5Y-AAF.Pdf
1 CAV/ACC/24/75 ACCIDENT IUVESTIGATION BRANCH CIVIL AIRCRAFT ACCIDEiiT Report on the Accident to Douglas DC-3 Aircraft Registration number 5Y-AAF which occurred on the 27th August,1975 At 0922 hours, at Mtwara Airport, Tanzania. E A S T A F R I CAN C 0 M M U NIT Y AOCIDEwr REPORT AOCIDE:~T INVESTIGATIOn BRAl'WH 'CIVIL ACCIDENT REPORT CAV/ACC/24/75 AIRCRAFT TYPE 8; HEGISTRATION: Douglas DC-::- 5Y-l~ ENGINE: Pratt & \filii tney R1830-90D REGISTERED OWlIJ]~R & OPERATOR: East African Airways Corporation, P.O. Box 19002, NAIROBI, Kenya. CREVf: CAPTAIN Gabriel Sebastian Turuka ) ) Uninjured FIJ:1ST OFFICER Steven Robert Wegoye ) PASSENGER: Sixteen - Uninjured. PLACE OF ACCIDEHT: ~,1twara Airport, Tanzania. DATE AND T1MB: 27th August, 1975, 0922 hours. ALL rrU'lES IN THIS REPORT ARE G.1VI. T. SUMMARY The aircraft was operating East African Airways Service flight number EC037 from Dar es Salaam to Nachingmea with an unscheduled refuelling stop at I1twara with 3 crew and 16 passengers on board. The flight from Dar es Salaam was uneventful and an approach and landing was made onto runway 19. After touch down the aircraft swung to the left and then to the right, after which it left the runway where both main landing gear assys collapsed causing substantial daLage to the centre section and nacelle structure. The report concludes that the most probable cause of the accident was the failure of the pilot to initiate corrective action to prevent the aircraft from turning off the runway. 1.1 HISTORY OF THE FLIGHT: The aircraft departed Dar es Salaam with three crew and 16 passengers. -

Installation and Maintenance Manual Winch Performa 46.2 STP
Installation and Maintenance Manual MRPW-05 Performa™ Winch 46.2 STP 46.2 STQP Index Introduction 3 Technical characteristics 3 Performance data 3 Weight 3 Maximum working load 3 Technical characteristics - Winch Quattro Performa 4 Performance data 4 Weight 4 Maximum working load 4 Outline 3 Winch 46.2 STP 3 Outline - Winch Quattro Performa 4 Winch 46.2 STQP 4 Installation 5 Installation procedure 6 Positioning the self-tailing arm 9 Maintenance 9 Washing 9 Maintenance table 9 Disassembly procedure 9 Exploded view with maintenance products 13 Assembly 14 Harken® limited worldwide warranty 15 Ordering spare parts 15 Exploded view 16 Performa Winch 46.2 STP 16 Performa Winch 46.2 STQP 18 Parts list 20 Performa Winch 46.2 STP 20 Performa Winch 46.2 STQP 21 Performa™ Winch 46.2 STP 2 Installation and Maintenance Manual Introduction - Technical characteristics - Outline Introduction This manual gives technical information on winch installation and maintenance, including disassembling and reassembling. This information is DESTINED EXCLUSIVELY for specialised personnel or expert users. Installation, disassembling and reassembling of the winch by personnel who are not experts may cause serious damage to users and those in the vicinity of the winch. Harken® accepts no responsibility for defective installation or reassembly of its winches. In case of doubt the Harken® Tech Service is at your disposal at [email protected] This Manual is available only in English. If you do not fully understand the English language, do not carry out the operations described in this Manual. Technical characteristics Power ratio Gear ratio 1st speed 11,70 : 1 2,30 : 1 2nd speed 46,50 : 1 9,20 : 1 The theoretical power ratio does not take friction into account. -

Drivetrain 17 36 30 30 31 32 32 33 35 37 38 39 39 40 40 41 41 41 41 41 40 36-40
B Drivetrain ............................... 18 to 41 Drivetrain Struts Main .............................................................................18-19 Self-aligning gland type (with space) ................................. 30 Intermediate ...................................................................... 18 Heavy duty ..................................................................... 30 Sailboat ............................................................................. 19 Studs .................................................................................. 31 Port and starboard ............................................................ 20 Tournament (with space) ................................................ 32 Vee .................................................................................... 21 Self-aligning gland type (without space) ............................ 32 Universal ........................................................................... 21 Spud type Adjustable ....................................................................22-23 Tournament water cooled ............................................... 33 Cut off type ..................................................................... 22 Right hand thread ........................................................... 35 Swivel type ..................................................................... 23 Shaft logs..........................................................................36-40 Strut bolts ............................................................................. -

82 Subpart 77.03—Marine Engineering Systems
§ 77.03±1 46 CFR Ch. I (10±1±98 Edition) 100 Barr Harbor Drive, West Conshohocken, PA Miscellaneous machinery alarms and con- 19428±2959 trols. ASTM F1014±1986, Standard Specification for General alarm systems. Flashlights on Vessels: 77.35±5(c) (b) Electrical equipment installed in [CGD 82±042, 53 FR 17704, May 18, 1988, as spaces ``specially suitable for vehicles'' amended by CGD 95±072, 60 FR 50463, Sept. 29, shall be in accordance with subchapter 1995; CGD 96-041, 61 FR 50729, Sept. 27, 1996; CGD 97±057, 62 FR 51045, Sept. 30, 1997] J (Electrical Engineering) of this chap- ter. Subpart 77.03ÐMarine [CGFR 65±50, 30 FR 16953, Dec. 30, 1965, as Engineering Systems amended by CGFR 66±33, 31 FR 15283, Dec. 6, 1966; CGFR 68±32, 33 FR 5716, Apr. 12, 1968; § 77.03±1 Installation and details. CGD 74±125A, 47 FR 15231, Apr. 8, 1982] (a) The installation of all systems of a marine engineering nature, together Subpart 77.06ÐLifesaving with the details of design, construc- Appliances and Arrangements tion, and installation, shall be in ac- cordance with the requirements of sub- § 77.06±1 Installation. chapter F (Marine Engineering) of this The installation of all lifesaving ap- chapter. Systems of this type include pliances and arrangements must be in the following: accordance with the requirements of subchapter W (Lifesaving Appliances Steering systems. Power for going astern. and Arrangements) of this chapter. Bilge and ballast systems. [CGD 84±069, 61 FR 25288, May 20, 1996] Tank vent and sounding systems. Overboard discharges and shell connections. -

DF-629 Fastwinder Winch Owner's Manual
NABRICO DF-629 BARGE CONNECTING WINCH Owner’s Manual OM-DF629-001-A THIS PAGE IS INTENTIONALLY LEFT BLANK. NABRICO DF-629-40-HL-6 BARGE CONNECTING WINCH Owner’s Manual NABRICO DF-629-40-HL-6 BARGE CONNECTING MANUAL WINCH Owner’s Manual CONTENTS SAFETY INFORMATION ........................................................................................ 4 1.1 GENERAL INFORMATION ............................................................................. 5 1.2 INSTALLATION OF EQUIPMENT ................................................................... 6 1.3 INSTALLATION OF WIRE ROPE .................................................................... 8 2.1 OPERATING THE WINCH .............................................................................. 10 3.1 EQUIPMENT INSPECTION ........................................................................... 13 3.2 EQUIPMENT LUBRICATION ......................................................................... 15 3.3 CLEANING AND STORAGE .......................................................................... 16 A.1 DIMENSIONAL .............................................................................................. 18 A.2 EQUIPPED WIRE ROPE ................................................................................ 19 A.3 PARTS BREAKDOWN ................................................................................... 20 A.4 PARTS LIST ................................................................................................... 21 NOTES .................................................................................................................. -

Bureau of Air Safety Investigation Report Basi
BUREAU OF AIR SAFETY INVESTIGATION REPORT BASI Report B/916/1017 Bell 214ST Helicopter VH-HOQ Timor Sea Latitude 12° 30' south Longitude 124° 25' east 22 November 1991 Bureau of Air Safety Investigation /i.:V Transport and Healonaf Development Department of Transport and Communications Bureau of Air Safety Investigation ACCIDENT INVESTIGATION REPORT B/916/1017 Bell 214ST Helicopter VH-HOQ Timor Sea Latitude 12° 30' south Longitude 124° 25' east 22 November 1991 Released by the Director of the Bureau of Air Safety Investigation under the provisions of Air Navigation Regulation 283 Bureau of Air Safety Investigation When the Bureau makes recommendations as a result of its investigations or research, safety, (in accordance with our charter), is our primary consideration. However, the Bureau fully recognises that the implementation of recommendations arising from its investigations will in some cases incur a cost to the industry. Consequently, the Bureau always attempts to ensure that common sense applies whenever recommendations are formulated. BASI does not have the resources to carry out a full cost- benefit analysis of every recommendation. The cost of any recommendation must always be balanced against its benefits to safety, and aviation safety involves the whole community. Such analysis is a matter for the CAA and the industry. ISBN 0642 193959 June 1993 This report was produced by the Bureau of Air Safety Investigation (BASI), PO Box 967, Civic Square ACT 2608. The Director of the Bureau authorised the investigation and the publication of this report pursuant to his delegated powers conferred by Air Navigation Regulations 278 and 283 respectively. -

WO 2015/012935 A2 29 January 2015 (29.01.2015) P O P C T
(12) INTERNATIONAL APPLICATION PUBLISHED UNDER THE PATENT COOPERATION TREATY (PCT) (19) World Intellectual Property Organization International Bureau (10) International Publication Number (43) International Publication Date WO 2015/012935 A2 29 January 2015 (29.01.2015) P O P C T (51) International Patent Classification: Bart Dean [US/US]; 2691 Daunet Ave., Simi Valley, Cali B64C 27/26 (2006.01) B64C 27/54 (2006.01) fornia 93065 (US). PARKS, William Martin [US/US]; B64C 5/02 (2006.01) B64C 39/02 (2006.01) 2805 North Woodrow Ave., Simi Valley, California 93065 B64C 9/00 (2006.01) G05D 1/08 (2006.01) (US). GANZER, David Wayne [US/US]; 4607 Kleberg B64C 25/00 (2006.01) B64C 29/00 (2006.01) St., Simi Valley, California 93063 (US). FISHER, Chris¬ topher Eugene [US/US]; 4 1 Los Vientos Dr., Thousand (21) International Application Number: Oaks, California 91320 (US). MUKHERJEE, Jason Sid- PCT/US20 14/036863 harthadev [US/US]; 605 Muirfield Ave., Simi Valley, (22) International Filing Date: California 93065 (US). KING, Joseph Frederick 5 May 2014 (05.05.2014) [US/US]; 10540 Gaviota Ave., Granada Hills, California 91344 (US). (25) Filing Language: English (74) Agent: DAWSON, James K.; 1445 E. Los Angeles Ave., English (26) Publication Language: Suite 108, Simi Valley, California 93065-2827 (US). (30) Priority Data: (81) Designated States (unless otherwise indicated, for every 3 May 2013 (03.05.2013) 61/819,487 US kind of national protection available): AE, AG, AL, AM, (71) Applicant: AEROVIRONMENT, INC. [US/US]; 181 W . AO, AT, AU, AZ, BA, BB, BG, BH, BN, BR, BW, BY, Huntington Drive, Suite 202, Monrovia, California 91016 BZ, CA, CH, CL, CN, CO, CR, CU, CZ, DE, DK, DM, (US). -

Csa Winch Procedures
CSA WINCH PROCEDURES Cover photo courtesy Neil Van Lieu TABLE OF CONTENTS 1. SCOPE ............................................................................................................................................. 1 2. REFERENCES ................................................................................................................................. 1 3. WINCH DESCRIPTION ................................................................................................................... 1 4. CREW ROLES ................................................................................................................................. 2 4.1 WINCH CAPTAIN ...................................................................................................................... 3 4.2 WINCH OPERATOR ................................................................................................................. 3 4.3 WINCH OBSERVER/TRAINEE ................................................................................................. 3 4.4 SHAG DRIVER .......................................................................................................................... 4 4.5 WING RUNNER ........................................................................................................................ 4 4.6 FLAGGER.................................................................................................................................. 4 4.7 PILOT ....................................................................................................................................... -
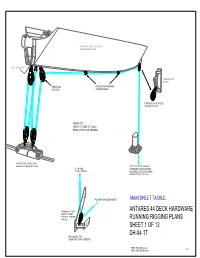
Running Rigging Plans Sheet 1 of 12 Dh-04-17 View Looking Fwd Under Sheet Winch Pedestal
MAINTAMER BOOM ILLUSTRATED, SELDEN BOOM SIMILAR BAILS BY SELDEN GOOSENECK BY SELDEN HARKEN 6058 FAIRLEADS ON MAINTAMER BLOCKS (5) OR SELDEN BOOM TURNING BLOCK SHACKLES TO GOOSENECK BAIL MAINSHEET USES 115' (35M) 1/2" (12mm) BRAID, EYE SPLICE ONE END HARKEN CARS & TRACK ASSY. SEE DH-04-18, HARDTOP FITOUT SHEET DESCENDS THROUGH UP TO SHEET STARBOARD FAIRLEAD IN MAST CLUTCH & WINCH MOUNTING PLATE TO MAST BASE ORGANIZERS, SEE DH-04-15 FROM MAST BASE ORGANIZERS MAIN SHEET TACKLE HARKEN 6058 75MM ANTARES 44 DECK HARDWARE BLOCK AT SHEET PEDESTAL TURNING BRACKET RUNNING RIGGING PLANS SHEET 1 OF 12 DH-04-17 VIEW LOOKING FWD UNDER SHEET WINCH PEDESTAL FIRST ISSUE NOV.6 2003 T. C. FIRST USED VESSEL 4408 HARKEN 6058 BLOCK AT JIB CLEW HARKEN OVER THE TOP BLOCK 3002, MOUNTS ON MAST PLATE SELF-TACKING JIB SHEET IS 108' (33M) X 3/8" (10mm) DYNEMA HARKEN 6058 BLOCKS ON CARS AND PORT PADEYE HARKEN PADEYE 688, P&S HARKEN 1617 3m TRACK, COMPOUND BEND AS PER DH-04-20 HARKEN CAR ASSEMBLY 2 OF 1624 CAR 1 OF 1614 COUPLER 2 OF 1561 TOGGLE SHEET DESCENDS THROUGH HARKEN PIN STOPS STARBOARD FAIRLEAD IN MAST 1624, P&S MOUNTING PLATE TO MAST BASE HARKEN END STOPS ORGANIZERS, SEE DH-04-15 1522 P&S UP TO SHEET CLUTCH & WINCH SELF TACKING JIB SHEET TACKLE FROM MAST BASE ORGANIZERS ANTARES 44 DECK HARDWARE RUNNING RIGGING PLANS HARKEN 6058 75MM BLOCK AT SHEET PEDESTAL TURNING SHEET 2 OF 12 BRACKET DH-04-17 VIEW LOOKING FWD T. C. UNDER SHEET WINCH PEDESTAL LINE ENTERS AND EXITS FURLING LINE IS AS CHAIN LOCKER THROUGH TWO HARKEN 134NP BULLET ORIGINAL SUPPLIED WITH FURLEX. -
Manual for Furling Mast TYPE RB Mk 4
595-065-E 2020-03-23 Manual for Furling mast TYPE RB Mk 4 Contents: Page: Contents: Page: Product description 2 Fitting and hoisting the sail 8 Checks and adjustments before Stepping 4 Before sailing 9 Line routing 6 Maintenance 10 Operation 7 2 Product description • Seldén furling mast allow for convenient setting and reefing of the mainsail. • The unique design of the halyard swivel bearing distributes the load over the whole ball race to give smoother furling and the lowest possible friction, even under high loads. • The new Mk 4 compact gear mechanism offers improved gear efficiency, allows a smaller mast cutout and is prepared for easy retro fit of electric furling drive unit. • This Instruction Manual has been compiled to give you information on the furling mast reefing system. Study it and follow the instructions carefully, and we guarantee you pleasurable use from your Seldén furling mast. Follow the relevant rigging instructions in our booklet ”HINTS AND ADVICE” for tuning the rig. Fig. 2:1 Sail compartment with luff extrusion 3 Top swivel Halyard swivel Access to sail feeder and Sail feeder halyard swivel Tensioning screw Tack hook Access to tack hook and tensioning screw Outhaul car Rachet lever Winch handle socket Line driver Fig 3:1 4 Checking luff extrusion tension prior to stepping the mast The luff extrusion is correctly tensioned before leaving the factory, but tension can be re-checked before stepping the mast in the following manner. Lay the mast horizontally on the side and keep it straight. The luff extrusion should now be just clear off the mast wall at its midpoint.