Simulations of Step-Like Bragg Gratings in Silica Fibers Using Comsol
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
5 Optical Fibers
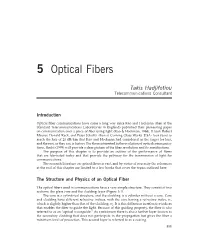
5 Optical Fibers Takis Hadjifotiou Telecommunications Consultant Introduction Optical fi ber communications have come a long way since Kao and Hockman (then at the Standard Telecommunications Laboratories in England) published their pioneering paper on communication over a piece of fi ber using light (Kao & Hockman, 1966). It took Robert Maurer, Donald Keck, and Peter Schultz (then at Corning Glass Works–USA) four years to reach the loss of 20 dB/km that Kao and Hockman had considered as the target for loss, and the rest, as they say, is history. For those interested in the evolution of optical communica- tions, Hecht (1999) will provide a clear picture of the fi ber revolution and its ramifi cations. The purpose of this chapter is to provide an outline of the performance of fi bers that are fabricated today and that provide the pathway for the transmission of light for communications. The research literature on optical fi bers is vast, and by virtue of necessity the references at the end of this chapter are limited to a few books that cover the topics outlined here. The Structure and Physics of an Optical Fiber The optical fi bers used in communications have a very simple structure. They consist of two sections: the glass core and the cladding layer (Figure 5.1). The core is a cylindrical structure, and the cladding is a cylinder without a core. Core and cladding have different refractive indices, with the core having a refractive index, n1, which is slightly higher than that of the cladding, n2. It is this difference in refractive indices that enables the fi ber to guide the light. -
MIL-STD-2196[SH) 12 January 1989 ‘ O Aperture Presented by a Device May Also Depend on the Incidence Angle of the Entering Light
Downloaded from http://www.everyspec.com m MIL-STD-2 196(SH) 12 January 1989 MILITARY STANDARD GLOSSARY, FIBER OPTICS o:’.$.f$gziw, AMSC N/A FSC 60GP DISTRIBUTION STATEMENT A. Approved forpublic release; distribution is unlimited. Downloaded from http://www.everyspec.com MIL-STD-2 196(SH) 12 January 1989 FOREWORD 1. This military standard isapproved foruseby the~partmentof the Navy and is available fol use by all Departments and Agencies of the Department of Defense. 2. Every effort was made toensure this glossary inconsistent with published standards. Several glossaries in fiber optics have been prepared bystandards organimtions. In 1982 the National Institute of Standards and Technology, formerly the National Bureau of Standards, published PB82-166257, 0ptical Waveguide Commimications Glossary. Two years later, The’Instituteof Electrical and Electronics Engineers approved IEEE Standard 8I2-l984, Definitions of Terms Relating to Fiber Optics, forthemost part bmedonthe contents of PB82-166257. In 1986, FED- STD- 1037, Glossary of Telecommunication Terms, was issued by the General Services Ad- ministration. The U.S. Army Information Systems Engineering Support Activity was the preparing activity and the National Communications System wasthe assigned agency. Withan orientation toward telecommunications, about 10 percent of its content is devoted to fiberoptic. Shortly thereafter: the Electronic Industries Association published EIA-440A, Fiber Optic Terminology, agamconsisting primarily of PB82-166257. A glossary, IEC-Draft 731-OpticaI Communication, is being prepared by the International Electrotechnical Commission. Different areas of fiber optics were emphasized by each. None covered fiber optics science and technology in its entirety. Some emphasized theory while others covered technology or applications. -

Specially Shaped Optical Fiber Probes: Understanding and Their Applications in Integrated Photonics, Sensing, and Microfluidics a Dissertation
Specially Shaped Optical Fiber Probes: Understanding and Their Applications in Integrated Photonics, Sensing, and Microfluidics A Dissertation Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Doctor of Philosophy in Mechanical Engineering by Yundong Ren June 2019 Advisory Committee: Assistant Professor Yuxiang Liu, Advisor (Mechanical Engineering Department, WPI), Professor Jamal Yagoobi (Head of Mechanical Engineering Department, WPI), Professor Douglas T. Petkie (Head of Physics Department, WPI), Associate Professor Songbai Ji (Biomedical Engineering Department, Mechanical Engineering Department, WPI) Professor Pawan Singh Takhar (Food Engineering, UIUC), Associate Professor Pratap Rao (Graduate Committee Representative, Mechanical Engineering Department, WPI) Abstract Thanks to their capability of transmitting light with low loss, optical fibers have found a wide range of applications in illumination, imaging, and telecommunication. However, since the light guided in a regular optical fiber is well confined in the core and effectively isolated from the environment, the fiber does not allow the interactions between the light and matters around it, which are critical for many sensing and actuation applications. Specially shaped optical fibers endow the guided light in optical fibers with the capability of interacting with the environment by modifying part of the fiber into a special shape, while still preserving the regular fiber’s benefit of low-loss light delivering. However, the existing specially shaped fibers have the following limitations: 1) limited light coupling efficiency between the regular optical fiber and the specially shaped optical fiber, 2) lack special shape designs that can facilitate the light-matter interactions, 3) inadequate material selections for different applications, 4) the existing fabrication setups for the specially shaped fibers have poor accessibility, repeatability, and controllability. -
Optical Waveguide Communications Glossary (Fa-Cs( ■ a Cl /\L T> S Fa Art C&O £> O K~~ No, /4O
ms Reference Publi¬ cations NAT'L INST. OF STAND & TECH R.I.C. A111 □ M T3Eb31 NBS HANDBOOK 140 V) \ / *<">1*0 of U.S. DEPARTMENT OF COMMERCE nal Bureau of Standards/National Telecommunications and Information Administration No, WO 1982 NATIONAL BUREAU OF STANDARDS The National Bureau of Standards was established by an act of Congress on March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation’s science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (I) a basis for the Nation’s physical measurement system, (2) scientilic and technological services for industry and government, (3) a technical basis lor equity in trade, and (4) technical services to promote public safety. The Bureau's technical work is per¬ formed by the National Measurement Laboratory, the National Engineering Laboratory, and the Institute for Computer Sciences and Technology. THE NATIONAL MEASUREMENT LABORATORY provides the national system ol physical and chemical and materials measurement; coordinates the system w ith measurement systems of other nations and furnishes essential services leading to accurate and uniform physical and chemical measurement throughout the Nation’s scientific community, industry, and commerce; conducts materials research leading to improved methods of measurement, standards, and data on the properties of materials needed by industry, commerce, educational institutions, and Government; provides advisory and research services to other Government agencies; develops, produces, and distributes Standard Reference Materials; and provides calibration services. The Laboratory consists of the following centers: Absolute Physical Quantities- — Radiation Research —Thermodynamics and Molecular Science — Analytical Chemistry — Materials Science. -

Module 3 : Wave Model
Module 3 : Wave Model Lecture 3.1 : Wave Model - I Objectives In this lecture you will learn the following Analysis of cylindrical waveguides Characteristic Equation (Eigen Value Equation) Modes of optical fiber MODAL PROPAGATION INSIDE AN OPTICAL FIBER (WAVE MODEL-I) 1. Basics 1. There are certain limitations to ray model. 2. The ray model does not predict correctly that even after total internal reflection there will be some field in the cladding Also it does not predict that rays can be launched at only discrete angles in an optical fiber. 3. For an accurate and complete description of light propagation inside an optical fiber we have to go in for a more rigorous model, called the WAVE MODEL. Here we shall discuss the propagation of light inside an optical fiber, treating light as an electromagnetic wave. 4. Inside a fiber core the optical energy gets guided i.e. the energy propagates along the axis of the core and the fields exponentially decay in the cladding away from the core-cladding interface. 5. In a practical fiber the cladding is surrounded by a protective layer. Generally, by the time the field reaches that layer, it dies down significantly so that the protecting layer does not affect the propagation of the wave significantly. That is, the whole propagation of light is governed by the core cladding interface and the interface between the cladding and other protecting layers does not affect the propagation. In other words, we can take the cladding to be of infinite size in our analysis, without incurring significant error. -

Glossary of Optical Communication Terms
ADA240 284 j Glossary of Optical Communication Terms James S. Beaty 4. April 1991 DOT/FAA/CT-TN91/9 This document is available to the U.S. public through the National Technical Information Service, Springfield, Virginia 22161. 91-10106 ~~~~U0De, tn of Toonspom 11lli11llll IIi rtckt al Aviation Administration Technical Center Atlantic City International Airport, N J 08405 NOTICE This document is disseminated under the sponsorship of the U.S. Department of Transportation in the interest of information exchange. The United States Government assumes no liability for the contents or use thereof. The United States Govemment does not endorse products or manufacturers. Trade or manufacturers' names appear herein solely because they are considered essential to the objective of this report. Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. DOT/FAA/C-TN91/9 4. Title and Subtitle S. Report Date April 1991 GLOSSARY OF OPTICAL COMMUNICATION TERMS 6. Performing Organization Code ACD-350 7. Aijtlor8s) S. Performing Organization Report No. James S. Beaty DOT/FAA/CT-TN91/9 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) U. S. Departrent of Transportation Federal Aviation Administration II.Contract or Grant No. Technical Center T0302Y Atlantic City International Airport, NJ 08405 13. T Typey of Report and Period Co'vered 12. Sponsoring Agency Name and Address Technical Note U. S. Department of Transportation April 1991 Federal Aviation Administration Technical Center 14. Sponsoring Agency Code Atlantic City International Airport, NJ 08405 15. Supplementary Notes 16. Abstract This glossary contains definitions of technical terms commonly used in the field of optical communication. -
Lecture 4: Optical Waveguides
Lecture 4: Optical waveguides Waveguide structures Waveguide modes Field equations Wave equations Guided modes in symmetric slab waveguides General formalisms for step-index planar waveguides References: A significant portion of the materials follow “Photonic Devices,” Jia-Ming Liu, Chapter 2 1 Waveguide structures 2 Waveguide structures • The basic structure of a dielectric waveguide consists of a longitudinally extended high-index optical medium, called the core, which is transversely surrounded by low-index media, called the cladding. A guided optical wave propagates in the waveguide along its longitudinal direction. • The characteristics of a waveguide are determined by the transverse profile of its dielectric constant ε(x, y)/εo, which is independent of the longitudinal (z) direction. • For a waveguide made of optically isotropic media, we can characterize the waveguide with a single spatially dependent transverse profile of the index of refraction n(x, y). 3 Nonplanar and planar waveguides There are two basic types of waveguides: In a nonplanar waveguide of two-dimensional transverse optical confinement, the core is surrounded by cladding in all transverse directions, and n(x, y) is a function of both x and y coordinates. E.g. the channel waveguides and the optical fibers In a planar waveguide that has optical confinement in only one transverse direction, the core is sandwiched between cladding layers in only one direction, say the x direction, with an index profile n(x). The core of a planar waveguide is also called the film, while the upper and lower cladding layers are called the cover and the substrate. 4 Optical waveguides x n 3 n2 y n1 n1 z (x, y, z) (r, φ, z) n2 (n1 > n2, n3) (n1 > n2) Planar (slab) waveguides for Cylindrical optical fibers integrated photonics (e.g. -

Technical Digest Symposium on Optical Fiber Measurements, 1986
A111DE S77A7S TANDARDS & N BS ^SbSmWI* TECH R.I.C. publications ECIAL PUBLICATION 720 est - x NBS-PUB U.S. DEPARTMENT OF COMMERCE / National Bureau of Standards Technical Digest Symposium on Optical Fiber Measurements, 1986 Sponsored by the National Bureau of Standards in cooperation with the IEEE Optical Communications Committee and the Optical Society of America Tm he National Bureau of Standards' was established by an act of Congress on March 3, 1901. The Bureau's overall goal is to strengthen and advance the nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (1) a basis for the nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to promote public safety. The Bureau's technical work is performed by the National Measurement Laboratory, the National Engineering Laboratory, the Institute for Computer Sciences and Technology, and the Institute for Materials Science and Engineering. The National Measurement Laboratory 2 Provides the national system of physical and chemical measurement; • Basic Standards coordinates the system with measurement systems of other nations and • Radiation Research furnishes essential services leading to accurate and uniform physical and • Chemical Physics chemical measurement throughout the Nation's scientific community, in- • Analytical Chemistry dustry, and commerce; provides advisory -

Optical Fiber Characterization
NBS A111D3 PUBLICATIONS NBS SPECIAL PUBLICATION 637 Volume 2 U.S. DEPARTMENT OF COMMERCE/National Bureau of Standards Optical Fiber Characterization 130 .U57 No. 637 Vol, 2 1933 c ^ NATIONAL BUREAU OF STANDARDS The National Bureau of Standards' was established by an act of Congress on March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis tor equity in trade, and (4) technical services to promote public safety. The Bureau's technical work is per- formed by the National Measurement Laboratory, the National Engineering Laboratory, and the Institute for Computer Sciences and Technology. THE NATIONAL MEASUREMENT LABORATORY provides the national system of physical and chemical and materials measurement; coordinates the system with measurement systems of other nations and furnishes essential services leading to accurate and uniform physical and chemical measurement throughout the Nation's scientific community, industry, and commerce; conducts materials research leading to improved methods of measurement, standards, and data on the properties of materials needed by industry, commerce, educational institutions, and Government; provides advisory and research services to other Government agencies; develops, produces, and distributes -

16EC712 - Fiber Optical Communication
16EC712 - Fiber Optical Communication DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING K.S.R. COLLEGE OF ENGINEERING: TIRUCHENGODE – 637 215. COURSE / LESSON PLAN SCHEDULE NAME : A.JAYAMATHI CLASS: IV ECE A , B SUBJECT CODE AND NAME : 16EC712 & FIBER OPTICAL COMMUNICATION TEXT BOOKS 1. John M. Senior ,“Optical Fiber Communication”, Pearson Education ,3rd Edition, 2013 2. Gerd Keiser, “Optical Fiber Communication”, Mc Graw Hill, 4th Edition. 2010 REFERENCES 1. GovindP.Agrawal, “Fiber-optic communication systems”, John Wiley & sons. 4th Edition, 2010. 2.Harry J.R Dutton, “Understanding Optical Communications”, IBM Corporation, International Technical Support Organization, 2012. 3.J.Gower, “Optical Communication System”, Prentice Hall of India, 2nd Edition, 2003. 4.R.P.Khare, “Fiber Optics and Optoelectronics”, Oxford University Press, 2007. C). LEGEND: L - Lecture BB - Black Board OHP - Over Head Projector pp - Pages Tx - Text Rx - Reference Teaching Lecture Sl. No Topics to be covered Aid Book No./Page No Hour Required UNIT I - OPTICAL FIBER WAVEGUIDES TX1/PP 12-14, TX2/PP 26-31, 1 L1 Introduction and Ray theory transmission BB RX1/PP 1-7, RX3/PP 33-36 Characteristics of Light-Total internal reflection, TX1/PP 14-20, TX2/PP 32-35 2 L2 BB Acceptance angle RX3/PP 35-36 TX1/PP 14-20,TX2/PP 32-35, 3 L3 Numerical aperture , Skew rays BB RX3/PP 36-37 Electromagnetic mode theory of optical TX1/PP 24-28, RX3/PP 46-49 4 L4 BB propagation -EM waves ,Modes in Planar guide RX1/PP 28-36 5 L5 Phase and group velocity BB TX1/PP 103-104,RX3/PP -

Spectroscopy, Manipulation and Trapping of Neutral Atoms, Molecules, and Other Particles Using Optical Nanofibers: a Review
Sensors 2013, 13, 10449-10481; doi:10.3390/s130810449 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Review Spectroscopy, Manipulation and Trapping of Neutral Atoms, Molecules, and Other Particles Using Optical Nanofibers: A Review Michael J. Morrissey 1, Kieran Deasy 2, Mary Frawley 2,3, Ravi Kumar 2,3, Eugen Prel 2,3, Laura Russell 2,3, Viet Giang Truong 2 and Síle Nic Chormaic 1,2,3,* 1 School of Chemistry and Physics, University of KwaZulu-Natal, Durban 4001, South Africa; E-Mail: [email protected] 2 Light-Matter Interactions Unit, OIST Graduate University, 1919-1 Tancha, Onna-son, Okinawa 904-0495, Japan; E-Mails: [email protected] (K.D.); [email protected] (M.F.); [email protected] (R.K.); [email protected] (E.P.); [email protected] (L.R.); [email protected] (V.G.T.) 3 Physics Department, University College Cork, Cork, Ireland * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +81-98-966-1551. Received: 31 May 2013; in revised form: 18 July 2013 / Accepted: 1 August 2013 / Published: 13 August 2013 Abstract: The use of tapered optical fibers, i.e., optical nanofibers, for spectroscopy and the detection of small numbers of particles, such as neutral atoms or molecules, has been gaining interest in recent years. In this review, we briefly introduce the optical nanofiber, its fabrication, and optical mode propagation within. We discuss recent progress on the integration of optical nanofibers into laser-cooled atom and vapor systems, paying particular attention to spectroscopy, cold atom cloud characterization, and optical trapping schemes. -

FED-STD-1037C Raceway
FED-STD-1037C raceway: Within a building, an radar blind range: The range that corresponds to the enclosure, i.e., channel, used to situation in which a radar transmitter is on and hence contain and protect wires, cables, or the receiver must be off, so that the radar transmitted bus bars. (188) signal does not saturate, i.e., does not blind, its own receiver. Note: Radar blind ranges occur because rack: A frame upon which one or there is a time interval between transmitted pulses that more units of equipment are mounted. (188) Note: corresponds to the time required for a pulse to DOD racks are always vertical. propagate to the object, i.e., to the target, and its reflection to travel back. This causes an attempt to racon: See radar beacon. measure the range just as the radar transmitter is transmitting the next pulse. However, the receiver is rad: Acronym for radiation absorbed dose. The off, therefore this particular range cannot be basic unit of measure for expressing absorbed radiant measured. The width of the range value that cannot energy per unit mass of material. Note 1: A rad be measured depends on the duration of the time that corresponds to an absorption of 0.01 J/kg, i.e., 100 the radar receiver is off, which depends on the ergs/g. Note 2: The absorbed radiant energy heats, duration of the transmitted pulse. The return-time ionizes, and/or destroys the material upon which it is interval could be coincident with the very next radar- incident. transmitted pulse, i.e., the first pulse following a transmitted pulse, or the second, or the third, and so rad.: Abbreviation for radian(s).