Cloud Classification and Distribution of Cloud Types in Beijing Using Ka
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Global Modeling of Contrail and Contrail Cirrus Climate Impact
GLOBAL MODELING OF THE CONTRAIL AND CONTRAIL CIRRUS CLIMATE IMPACT BY ULRIKE BU RKHARDT , BERND KÄRCHER , AND ULRICH SCH U MANN et al. 2010). For the given ambient Modeling the physical processes governing the life cycle of conditions, their direct radia- contrail cirrus clouds will substantially narrow the uncer- tive effect is mainly determined tainty associated with the aviation climate impact. by coverage and optical depth. The microphysical properties of contrail cirrus likely differ from substantial part of the aviation climate impact those of most natural cirrus, at least during the initial may be due to aviation-induced cloudiness (AIC; stages of the contrail cirrus life cycle (Heymsfield A Brasseur and Gupta 2010), which is arguably et al. 2010). Contrails form and persist in air that is the most important but least understood component ice saturated, whereas natural cirrus usually requires in aviation climate impact assessments. The AIC in- high ice supersaturation to form (Jensen et al. 2001). cludes contrail cirrus and changes in cirrus properties This difference implies that in a substantial fraction or occurrence arising from aircraft soot emissions of the upper troposphere contrail cirrus can persist in (soot cirrus). Linear contrails are line-shaped ice supersaturated air that is cloud free, thus increasing clouds that form behind cruising aircraft in clear air high cloud coverage. Contrails and contrail cirrus and within cirrus clouds. Linear contrails transform existing above, below, or within clouds change the into irregularly shaped ice clouds (contrail cirrus) and column optical depth and radiative fluxes. They may may form cloud clusters in favorable meteorological also indirectly affect radiation by changing the mois- conditions, occasionally covering large horizontal ture budget of the upper troposphere, and therefore areas extending up to 100,000 km2 (Duda et al. -

P4b.7 Mixed-Phase Cloud Retrievals Using Doppler Radar Spectra
P4B.7 MIXED-PHASE CLOUD RETRIEVALS USING DOPPLER RADAR SPECTRA Matthew D. Shupe* NOAA Environmental Technology Laboratory, Boulder, CO 80305 Pavlos Kollias University of Miami, Miami, FL Sergey Y. Matrosov and Timothy L. Schneider NOAA Environmental Technology Laboratory, Boulder, CO 1. INTRODUCTION 2. MEASUREMENTS The radar Doppler spectrum contains a wealth of All measurements discussed here were made by information on cloud microphysical properties. Typically, ground-based remote-sensors at the CRYSTAL-FACE radar-based cloud retrievals use only the zeroth or first eastern ground site located in Miami, Florida (25° 39' N, 80° moments of the Doppler spectrum – reflectivity and mean 26' W) on 29 July, 2002. Measurements of the radar Doppler velocity – to derive quantities such as cloud water Doppler spectrum were made by a vertically-pointing, 35- content and particle characteristic size (e.g., Liou and GHz, millimeter cloud radar (MMCR). The MMCR has 45 m Sassen 1994; Matrosov et al. 2002). When using only the vertical resolution and resolves the Doppler spectrum over moments of the Doppler spectrum, important spectral the range of -4.1 to +4.1 m s -1 to 0.064 m s -1 using 128 fast information can be lost, particularly when the spectrum is Fourier transform points. We utilize one of four alternating multi-modal. Multi-modal spectra are possible when a operational modes that samples for 1.8 seconds at 35- mixture of two or more cloud particle phases, habits, or second intervals. Radar reflectivities for the half-hour long, sizes exist in the same volume (e.g., Gossard et al. -

Observation of Polar Stratospheric Clouds Down to the Mediterranean Coast
Atmos. Chem. Phys., 7, 5275–5281, 2007 www.atmos-chem-phys.net/7/5275/2007/ Atmospheric © Author(s) 2007. This work is licensed Chemistry under a Creative Commons License. and Physics Observation of Polar Stratospheric Clouds down to the Mediterranean coast P. Keckhut1, Ch. David1, M. Marchand1, S. Bekki1, J. Jumelet1, A. Hauchecorne1, and M. Hopfner¨ 2 1Service d’Aeronomie,´ Institut Pierre Simon Laplace, B.P. 3, 91371, Verrieres-le-Buisson,` France 2Forschungszentrum Karlsruhe, Institut fur¨ Meteorologie und Klimaforschung, Karlsruhe, Germany Received: 8 March 2007 – Published in Atmos. Chem. Phys. Discuss.: 15 May 2007 Revised: 5 October 2007 – Accepted: 6 October 2007 – Published: 12 October 2007 Abstract. A Polar Stratospheric Cloud (PSC) was detected spheric temperatures are expected to cool down due to ozone for the first time in January 2006 over Southern Europe af- depletion, but also to the increase in the concentrations of ter 25 years of systematic lidar observations. This cloud greenhouse gases. Such findings are already reported and was observed while the polar vortex was highly distorted simulated (Ramaswamy et al., 2001), although trends are less during the initial phase of a major stratospheric warming. clear at high latitudes due to a larger natural variability and Very cold stratospheric temperatures (<190 K) centred over potential dynamical feedback. Nearly twenty years after the the Northern-Western Europe were reported, extending down signing of the Montreal Protocol, the timing and extent of the to the South of France -
Cloud-Spotting Game Sheet
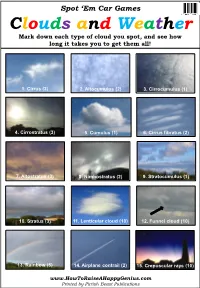
Spot ‘Em Car Games Clouds and Weather Mark down each type of cloud you spot, and see how long it takes you to get them all! 1. Cirrus (2) 2. Altocumulus (2) 3. Cirrocumulus (1) 4. Cirrostratus (3) 5. Cumulus (1) 6. Cirrus fibratus (2) 7. Altostratus (3) 8. Nimbostratus (2) 9. Stratocumulus (1) 10. Stratus (3) 11. Lenticular cloud (10) 12. Funnel cloud (10) 13. Rainbow (5) 14. Airplane contrail (2) 15. Crepuscular rays (10) www.HowToRaiseAHappyGenius.com Printed by Pictish Beast Publications Spot ‘Em Car Games Clouds and Weather More information about how to identify the weather phenomena that are part of this car game 1. Cirrus: Cirrus clouds look like strands of white cotton wool that have been pulled apart and spread across the sky. 2. Altocumulus: Altocumulus clouds form a layer at mid-altitudes that covers much of the sky, and this layer is usually made up of patterns of regularly spaced and shaped patches with bands of blue sky between them. 3. Cirrocumulus: Cirrocumulus clouds are similar to altocumulus, but they are found higher up in the sky and are made up of smaller patches of cloud. 4. Cirrostratus: Cirrostratus clouds form a continuous sheet of cloud high up in the sky that are thin enough for the sun to be able to shine through, creating a halo effect. 5. Cumulus: Cumulus clouds are distinctive fluffy looking clouds that are clearly separated from other clouds in the sky. They are what you would draw if asked to draw a picture of a cloud. 6. Cirrus fibratus: Cirrus fibratus are a type of Cirrus cloud that form very distinctive long, fluffy lines across the sky. -

Ice Polar Stratospheric Clouds Detected from Assimilation of Atmospheric Infrared Sounder Data
Ice Polar Stratospheric Clouds Detected from Assimilation of Atmospheric Infrared Sounder Data Ivanka Stajner,1,2 Craig Benson,3,2 Hui-Chun Liu,1,2 Steven Pawson,2 Nicole Brubaker,1,2 Lang-Ping Chang,1,2 Lars Peter Riishojgaard3,2, and Ricardo Todling1,2 1 Science Applications International Corporation, Beltsville, Maryland 2 Global Modeling and Assimilation Office, NASA Goddard Space Flight Center, Greenbelt, Maryland 3 Goddard Earth Sciences and Technology Center, University of Maryland Baltimore County, Baltimore, Maryland 1 A novel technique is presented for the detection and 45 about ice PSCs (Meerkoetter 1992; Hervig et al. 2001). 2 mapping of ice polar stratospheric clouds (PSCs), 46 Maps of ice PSCs were retrieved from differences in 3 using brightness temperatures from the Atmospheric 47 radiances in two channels and also allowed distinction 4 Infrared Sounder (AIRS) “moisture” channel near 48 between ice PSCs and cirrus. In contrast, even the 5 6.79 μm. It is based on observed-minus-forecast 49 strongest nitric-acid-trihydrate PSCs cannot be 6 residuals (O-Fs) computed when using AIRS 50 retrieved from AVHRR because their signal falls below 7 radiances in the Goddard Earth Observing System 51 AVHRR measurement uncertainty (Hervig et al. 2001). 8 version 5 (GEOS-5) data assimilation system. 52 Tropospheric ice clouds can be retrieved from the 9 Brightness temperatures are computed from six-hour 53 Atmospheric Infrared Sounder (AIRS) data. 10 GEOS-5 forecasts using a radiation transfer module 54 Comparisons of AIRS spectra with a radiative transfer 11 under clear-sky conditions, meaning they will be too 55 model in the window region 10-12.5 μm show 12 high when ice PSCs are present. -

Contrails, Contrail Cirrus, and Ship Tracks
214 Proceedings of the TAC-Conference, June 26 to 29, 2006, Oxford, UK Contrails, contrail cirrus, and ship tracks K. Gierens* DLR-Institut für Physik der Atmosphäre Oberpfaffenhofen, Germany Keywords: Aerosol effects on clouds and climate ABSTRACT: The following text is an enlarged version of the conference tutorial lecture on con- trails, contrail cirrus, and ship tracks. I start with a general introduction into aerosol effects on clouds. Contrail formation and persistence, aviation’s share to cirrus trends and ship tracks are treated then. 1 INTRODUCTION The overarching theme above the notions “contrails”, “contrail cirrus”, and “ship tracks” is the ef- fects of anthropogenic aerosol on clouds and on climate via the cloud’s influence on the flow of ra- diation energy in the atmosphere. Aerosol effects are categorised in the following way: - Direct effect: Aerosol particles scatter and absorb solar and terrestrial radiation, that is, they in- terfere directly with the radiative energy flow through the atmosphere (e.g. Haywood and Boucher, 2000). - Semidirect effect: Soot particles are very effective absorbers of radiation. When they absorb ra- diation the ambient air is locally heated. When this happens close to or within clouds, the local heating leads to buoyancy forces, hence overturning motions are induced, altering cloud evolu- tion and potentially lifetimes (e.g. Hansen et al., 1997; Ackerman et al., 2000). - Indirect effects: The most important role of aerosol particles in the atmosphere is their role as condensation and ice nuclei, that is, their role in cloud formation. The addition of aerosol parti- cles to the natural aerosol background changes the formation conditions of clouds, which leads to changes in cloud occurrence frequencies, cloud properties (microphysical, structural, and op- tical), and cloud lifetimes (e.g. -

Clarifying the Dominant Sources and Mechanisms of Cirrus Cloud Formation
Clarifying the Dominant Sources and Mechanisms of Cirrus Cloud Formation The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Cziczo, D. J., K. D. Froyd, C. Hoose, E. J. Jensen, M. Diao, M. A. Zondlo, J. B. Smith, C. H. Twohy, and D. M. Murphy. “Clarifying the Dominant Sources and Mechanisms of Cirrus Cloud Formation.” Science 340, no. 6138 (June 14, 2013): 1320–1324. As Published http://dx.doi.org/10.1126/science.1234145 Publisher American Association for the Advancement of Science (AAAS) Version Author's final manuscript Accessed Wed Mar 16 03:10:42 EDT 2016 Citable Link http://hdl.handle.net/1721.1/87714 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ Clarifying the dominant sources and mechanisms of cirrus cloud formation Authors: Daniel J. Cziczo1*, Karl D. Froyd2,3, Corinna Hoose4, Eric J. Jensen5, Minghui Diao6, Mark A. Zondlo6, Jessica B. Smith7 , Cynthia H. Twohy8, and Daniel M. Murphy2 Affiliations: 1Department of Earth, Atmospheric and Planetary Sciences, Massachusetts Institute of Technology, 77 Massachusetts Ave., Cambridge, MA, 02139, USA. 2NOAA Earth System Research Laboratory, Chemical Sciences Division, Boulder, CO 80305 USA. 3Cooperative Institute for Research in Environmental Science, University of Colorado, Boulder, CO 80309 USA. 4Institute for Meteorology and Climate Research – Atmospheric Aerosol Research, Karlsruhe Institute of Technology, 76021 Karlsruhe, Germany. 5 NASA Ames Research Center, Moffett Field, CA 94035, USA. 6 Department of Civil and Environmental Engineering, Princeton University, Princeton, NJ 08544, USA. 7 School of Engineering and Applied Sciences, Harvard University, Cambridge, MA, 02138, USA. -

Glossary of Severe Weather Terms
Glossary of Severe Weather Terms -A- Anvil The flat, spreading top of a cloud, often shaped like an anvil. Thunderstorm anvils may spread hundreds of miles downwind from the thunderstorm itself, and sometimes may spread upwind. Anvil Dome A large overshooting top or penetrating top. -B- Back-building Thunderstorm A thunderstorm in which new development takes place on the upwind side (usually the west or southwest side), such that the storm seems to remain stationary or propagate in a backward direction. Back-sheared Anvil [Slang], a thunderstorm anvil which spreads upwind, against the flow aloft. A back-sheared anvil often implies a very strong updraft and a high severe weather potential. Beaver ('s) Tail [Slang], a particular type of inflow band with a relatively broad, flat appearance suggestive of a beaver's tail. It is attached to a supercell's general updraft and is oriented roughly parallel to the pseudo-warm front, i.e., usually east to west or southeast to northwest. As with any inflow band, cloud elements move toward the updraft, i.e., toward the west or northwest. Its size and shape change as the strength of the inflow changes. Spotters should note the distinction between a beaver tail and a tail cloud. A "true" tail cloud typically is attached to the wall cloud and has a cloud base at about the same level as the wall cloud itself. A beaver tail, on the other hand, is not attached to the wall cloud and has a cloud base at about the same height as the updraft base (which by definition is higher than the wall cloud). -

Use of Cloud Radar Observations for Model Evaluation: a Probabilistic Approach Christian Jakob Bureau of Meteorology Research Centre, Melbourne, Australia
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 109, D03202, doi:10.1029/2003JD003473, 2004 Use of cloud radar observations for model evaluation: A probabilistic approach Christian Jakob Bureau of Meteorology Research Centre, Melbourne, Australia Robert Pincus and Ce´cile Hannay Climate Diagnostics Center, National Oceanic and Atmospheric Administration Cooperative Institute for Research in Environmental Sciences, Boulder, Colorado, USA Kuan-Man Xu NASA Langley Research Center, Hampton, Virginia, USA Received 30 January 2003; revised 21 October 2003; accepted 17 November 2003; published 5 February 2004. [1] The use of narrow-beam, ground-based active remote sensors (such as cloud radars and lidars) for long-term observations provides valuable new measurements of the vertical structure of cloud fields. These observations might be quite valuable as tests for numerical simulations, but the vastly different spatial and temporal scales of the observations and simulation must first be reconciled. Typically, the observations are averaged over time and those averages are claimed to be representative of a given model spatial scale, though the equivalence of temporal and spatial averages is known to be quite tenuous. This paper explores an alternative method of model evaluation based on the interpretation of model cloud predictions as probabilistic forecasts at the observation point. This approach requires no assumptions about statistical stationarity and allows the use of an existing, well- developed suite of analytic tools. Time-averaging and probabilistic evaluation techniques are contrasted, and their performance is explored using a set of ‘‘perfect’’ forecasts and observations extracted from a long cloud system model simulation of continental convection. This idealized example demonstrates that simple time averaging always obscures forecast skill regardless of model domain size. -
5.6 Attempting to Turn Night Into Day; Development of Visible Like Nighttime Satellite Images
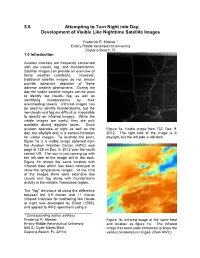
5.6 Attempting to Turn Night into Day; Development of Visible Like Nighttime Satellite Images Frederick R. Mosher * Embry-Riddle Aeronautical University Daytona Beach, FL 1.0 Introduction Aviation interests are frequently concerned with low clouds, fog, and thunderstorms. Satellite images can provide an overview of these weather conditions. However, traditional satellite images do not always provide adequate depiction of these adverse weather phenomena. During the day the visible satellite images can be used to identify low clouds, fog, as well as identifying thunderstorms by their overshooting towers. Infrared images can be used to identify thunderstorms, but the low clouds and fog are difficult or impossible to identify on infrared images. While the visible images are useful, they are only available during daylight hours. Since aviation operates at night as well as the Figure 1a. Visible image from 13Z, Dec. 9, day, the daylight only is a serious limitation 2012. The right side of the image is in for visible images. To illustrate the point, daylight, but the left side is still dark. figure 1a is a visible image obtained from the Aviation Weather Center (AWC) web page at 13Z on Dec. 9, 2012 over the south central US. The sun is just coming up with the left side of the image still in the dark. Figure 1b shows the same location with infrared data which has been colorized to show the temperature ranges. At the time of the images there were extensive low clouds and fog along with thunderstorm activity in the eastern Tennessee region. The "fog" technique of using the difference between the 3.9 micron and 11 micron infrared channels for monitoring low clouds at night was developed by Ellrod (1995), and applied to AWC operations using a __________________________________ * Corresponding author address: Frederick R. -

Cirrus Clouds in a Global Climate Model with a Statistical Cirrus Cloud Scheme
Atmos. Chem. Phys. Discuss., 9, 16607–16682, 2009 Atmospheric www.atmos-chem-phys-discuss.net/9/16607/2009/ Chemistry © Author(s) 2009. This work is distributed under and Physics the Creative Commons Attribution 3.0 License. Discussions This discussion paper is/has been under review for the journal Atmospheric Chemistry and Physics (ACP). Please refer to the corresponding final paper in ACP if available. Cirrus clouds in a global climate model with a statistical cirrus cloud scheme M. Wang1,* and J. E. Penner1 1Department of Atmospheric, Oceanic, and Space Sciences, University of Michigan, USA *now at: Pacific Northwest National Laboratory, Richland, Washington, USA Received: 18 June 2009 – Accepted: 30 July 2009 – Published: 7 August 2009 Correspondence to: M. Wang ([email protected]) Published by Copernicus Publications on behalf of the European Geosciences Union. 16607 Abstract A statistical cirrus cloud scheme that accounts for mesoscale temperature perturba- tions is implemented into a coupled aerosol and atmospheric circulation model to bet- ter represent both cloud fraction and subgrid-scale supersaturation in global climate 5 models. This new scheme is able to better simulate the observed probability distri- bution of relative humidity than the scheme that was implemented in an older version of the model. Heterogeneous ice nuclei (IN) are shown to affect not only high level cirrus clouds through their effect on ice crystal number concentration but also low level liquid clouds through the moistening effect of settling and evaporating ice crystals. As 10 a result, the change in the net cloud forcing is not very sensitive to the change in ice crystal concentrations associated with heterogeneous IN because changes in high cir- rus clouds and low level liquid clouds tend to cancel. -

Opt Thick PSC 7
CALIPSO observations of wave-induced PSCs with near-unity optical depth over Antarctica in 2006-2007 Noel V.1, Hertzog A.2 and Chepfer H.2 1 Laboratoire de Météorologie Dynamique, Institut Pierre-Simon Laplace, CNRS, Palaiseau, France 2 Laboratoire de Météorologie Dynamique, UPMC Univ. Paris 06, Palaiseau, France Proposed for publication in the Journal of Geophysical Research. Contact: [email protected] Vincent Noel Laboratoire de Météorologie Dynamique Ecole Polytechnique 91128 Palaiseau, France Tel: 33169335146 Abstract Ground-based and satellite observations have hinted at the existence of Polar Stratospheric Clouds (PSCs) with relatively high optical depths, even if optical depth values are hard to come by. This study documents a Type II PSC observed from spaceborne lidar, with visible optical depths up to 0.8. Comparisons with multiple temperature fields, including reanalyses and results from mesoscale simulations, suggest that intense small-scale temperature fluctuations due to gravity waves play an important role in its formation; while nearby observations show the presence of a potentially related Type Ia PSC further downstream inside the polar vortex. Following this first case, the geographic distribution and microphysical properties of PSCs with optical depths above 0.3 are explored over Antarctica during the 2006 and 2007 austral winters. These clouds are rare (less than 1% of profiles) and concentrated over areas where strong winds hit steep ground slopes in the Western hemisphere, especially over the Peninsula. Such PSCs are colder than the general PSC population, and their detection is correlated with daily temperature minimas across Antarctica. Lidar and depolarization ratios within these clouds suggest they are most likely ice- based (Type II).