Implementation and Validation of an Advanced Wind Energy Controller in Aero-Servo-Elastic Simulations Using the Lifting Line Free Vortex Wake Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CHAPTER 7 Design and Development of Small Wind Turbines
CHAPTER 7 Design and development of small wind turbines Lawrence Staudt Center for Renewable Energy, Dundalk Institute of Technology, Ireland. For the purposes of this chapter, “small” wind turbines will be defi ned as those with a power rating of 50 kW or less (approximately 15 m rotor diameter). Small electricity-generating wind turbines have been in existence since the early 1900s, having been particularly popular for providing power for dwellings not yet con- nected to national electricity grids. These turbines largely disappeared as rural electrifi cation took place, and have primarily been used for remote power until recently. The oil crisis of the 1970s led to a resurgence in small wind technology, including the new concept of grid-connected small wind technology. There are few small wind turbine manufacturers with a track record spanning more than a decade. This can be attributed to diffi cult market conditions and nascent technol- ogy. However, the technology is becoming more mature, energy prices are rising and public awareness of renewable energy is increasing. There are now many small wind turbine companies around the world who are addressing the growing market for both grid-connected and remote power applications. The design fea- tures of small wind turbines, while similar to large wind turbines, often differ in signifi cant ways. 1 Small wind technology Technological approaches taken for the various components of a small wind turbine will be examined: the rotor, the drivetrain, the electrical systems and the tower. Of course wind turbines must be designed as a system, and so rotor design affects drivetrain design which affects control system design, etc. -
The Prediction Model of Characteristics for Wind Turbines Based on Meteorological Properties Using Neural Network Swarm Intelligence
sustainability Article The Prediction Model of Characteristics for Wind Turbines Based on Meteorological Properties Using Neural Network Swarm Intelligence Tugce Demirdelen 1 , Pırıl Tekin 2,* , Inayet Ozge Aksu 3 and Firat Ekinci 4 1 Department of Electrical and Electronics Engineering, Adana Alparslan Turkes Science and Technology University, 01250 Adana, Turkey 2 Department of Industrial Engineering, Adana Alparslan Turkes Science and Technology University, 01250 Adana, Turkey 3 Department of Computer Engineering, Adana Alparslan Turkes Science and Technology University, 01250 Adana, Turkey 4 Department of Energy Systems Engineering, Adana Alparslan Turkes Science and Technology University, 01250 Adana, Turkey * Correspondence: [email protected]; Tel.: +90-322-455-0000 (ext. 2411) Received: 17 July 2019; Accepted: 29 August 2019; Published: 3 September 2019 Abstract: In order to produce more efficient, sustainable-clean energy, accurate prediction of wind turbine design parameters provide to work the system efficiency at the maximum level. For this purpose, this paper appears with the aim of obtaining the optimum prediction of the turbine parameter efficiently. Firstly, the motivation to achieve an accurate wind turbine design is presented with the analysis of three different models based on artificial neural networks comparatively given for maximum energy production. It is followed by the implementation of wind turbine model and hybrid models developed by using both neural network and optimization models. In this study, the ANN-FA hybrid structure model is firstly used and also ANN coefficients are trained by FA to give a new approach in literature for wind turbine parameters’ estimation. The main contribution of this paper is that seven important wind turbine parameters are predicted. -
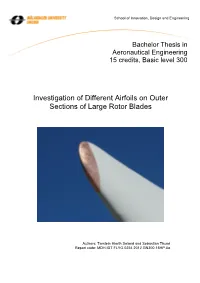
Investigation of Different Airfoils on Outer Sections of Large Rotor Blades
School of Innovation, Design and Engineering Bachelor Thesis in Aeronautical Engineering 15 credits, Basic level 300 Investigation of Different Airfoils on Outer Sections of Large Rotor Blades Authors: Torstein Hiorth Soland and Sebastian Thuné Report code: MDH.IDT.FLYG.0254.2012.GN300.15HP.Ae Sammanfattning Vindkraft står för ca 3 % av jordens produktion av elektricitet. I jakten på grönare kraft, så ligger mycket av uppmärksamheten på att få mer elektricitet från vindens kinetiska energi med hjälp av vindturbiner. Vindturbiner har använts för elektricitetsproduktion sedan 1887 och sedan dess så har turbinerna blivit signifikant större och med högre verkningsgrad. Driftsförhållandena förändras avsevärt över en rotors längd. Inre delen är oftast utsatt för mer komplexa driftsförhållanden än den yttre delen. Den yttre delen har emellertid mycket större inverkan på kraft och lastalstring. Här är efterfrågan på god aerodynamisk prestanda mycket stor. Vingprofiler för mitten/yttersektionen har undersökts för att passa till en 7.0 MW rotor med diametern 165 meter. Kriterier för bladprestanda ställdes upp och sensitivitetsanalys gjordes. Med hjälp av programmen XFLR5 (XFoil) och Qblade så sattes ett blad ihop av varierande vingprofiler som sedan testades med bladelement momentum teorin. Huvuduppgiften var att göra en simulering av rotorn med en aero-elastisk kod som gav information beträffande driftsbelastningar på rotorbladet för olika vingprofiler. Dessa resultat validerades i ett professionellt program för aeroelasticitet (Flex5) som simulerar steady state, turbulent och wind shear. De bästa vingprofilerna från denna rapportens profilkatalog är NACA 63-6XX och NACA 64-6XX. Genom att implementera dessa vingprofiler på blad design 2 och 3 så erhölls en mycket hög prestanda jämfört med stora kommersiella HAWT rotorer. -

Wind Field Simulation in a Wind Farm Using Openfoam and Actuator Line Model
ParCFD'2019 31st International Conference on Parallel Computational Fluid Dynamics May-14-17 2019, Antalya TURKEY WIND FIELD SIMULATION IN A WIND FARM USING OPENFOAM AND ACTUATOR LINE MODEL Huseyin Can Onel∗ & Dr. Ismail H. Tuncery ∗ Middle East Technical University (METU) Department of Aerospace Engineering 06800 Ankara, TURKEY e-mail: [email protected] yMiddle East Technical University (METU) Department of Aerospace Engineering 06800 Ankara, TURKEY e-mail: [email protected] - Web page: http://www.ae.metu.edu.tr/tuncer/ Key words: Aerospace applications, Wind turbine, HAWT, Actuator Line Model, Wake calculation Abstract. In this study, a horizontal axis wind turbine (HAWT) is modeled using so called Actuator Line Model (ALM), where full resolution of boundary layer over turbine blades is not needed and hence computation is cheaper. Results are validated against other numerical and experimental studies as well as panel method (XFOIL) and Blade Element Momentum Theory (BEMT) results which are still widely employed in today's wind energy industry. Important simulation and operation parameters and their effects on accuracy are discussed. It is concluded that within a certain range of tip speed ratios, ALM gives acceptable results and is a promising model for full-scale wind farm simulations to estimate energy production. 1 INTRODUCTION Market share of renewable energy grows at ever highest rates and wind turbine and wind farm design processes becomes more sophisticated with the advancements in computation technologies. There are two main design problems in wind energy: • Design of an individual wind turbine at its ideal operation conditions, where classical methods like 2D airfoil theory, potential flow theory and Blade Element Momentum Theory (BEMT) are still widely used, • Design of a complete wind farm, in which statistical meteorological data is used for macro-siting and simple analytical or empirical methods are used for micro-siting. -

Design and Simulation of Small Wind Turbine Blades in Q-Blade
© 2017 IJEDR | Volume 5, Issue 4 | ISSN: 2321-9939 Design and Simulation of Small Wind Turbine Blades in Q-Blade 1Veeksha Rao Ponakala, 2Dr G Anil Kumar 1PG Student, 2Assistant Professor School of Renewable Energy and Environment, Institute of Science and Technology, JNTUK, Kakinada, India Abstract- Electrical energy demand has been continuously increasing. Power generation using wind turbines is becoming viable solution as there is demand for cleaner energy sources. Wind power generators are usually located away from human dwellings for higher power generation. In any other case, turbines placed at lower altitudes, are subjected to low wind speeds and non optimal wind flow conditions. Vertical axis wind turbines (VAWTs) are more efficient than the horizontal axis wind turbines (HAWTs) for low wind speed applications because of their ability to capture wind flowing from any direction. Therefore, VAWT systems are more suitable for residential and urban applications as they are universally adaptable. Major limitation observed in VAWT is high drag and turbulent force produced by the blade. This paper presents the VAWT rotor blade design to overcome the limitations. By considering the parameters required for design of blade geometry, National Advisory Committee of Aeronautics (NACA) series 0016- 64 can be utilised for optimum aerodynamic performance. NACA 0018 airfoil is selected and analysed within the required range of Reynolds numbers and wind speeds in Q-Blade software. With the proper airfoil design optimal for low wind speed conditions, the turbine efficiency can be increased in addition to maximisation of the power produced. Index Terms- VAWT, Rotor Blades, Airfoil, Lift Force, Drag Force, Q-Blade. -
Qblade Guidelines V0.6
QBlade Guidelines v0.6 David Marten Juliane Wendler January 18, 2013 Contact: david.marten(at)tu-berlin.de Contents 1 Introduction 5 1.1 Blade design and simulation in the wind turbine industry . 5 1.2 The software project . 7 2 Software implementation 9 2.1 Code limitations . 9 2.2 Code structure . 9 2.3 Plotting results / Graph controls . 11 3 TUTORIAL: How to create simulations in QBlade 13 4 XFOIL and XFLR/QFLR 29 5 The QBlade 360◦ extrapolation module 30 5.0.1 Basics . 30 5.0.2 Montgomery extrapolation . 31 5.0.3 Viterna-Corrigan post stall model . 32 6 The QBlade HAWT module 33 6.1 Basics . 33 6.1.1 The Blade Element Momentum Method . 33 6.1.2 Iteration procedure . 33 6.2 The blade design and optimization submodule . 34 6.2.1 Blade optimization . 36 6.2.2 Blade scaling . 37 6.2.3 Advanced design . 38 6.3 The rotor simulation submodule . 39 6.4 The multi parameter simulation submodule . 40 6.5 The turbine definition and simulation submodule . 41 6.6 Simulation settings . 43 6.6.1 Simulation Parameters . 43 6.6.2 Corrections . 47 6.7 Simulation results . 52 6.7.1 Data storage and visualization . 52 6.7.2 Variable listings . 53 3 Contents 7 The QBlade VAWT Module 56 7.1 Basics . 56 7.1.1 Method of operation . 56 7.1.2 The Double-Multiple Streamtube Model . 57 7.1.3 Velocities . 59 7.1.4 Iteration procedure . 59 7.1.5 Limitations . 60 7.2 The blade design and optimization submodule . -

Performance Analysis of a Small Capacity Horizontal Axis Wind Turbine Using Qblade
International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-7, Issue-6S, March 2019 Performance Analysis of a Small Capacity Horizontal Axis Wind Turbine using QBlade Ali Said, Mazharul Islam, Mohiuddin A.K.M, Moumen Idres Abstract--- In recent times, wind energy has become one of the In this article, selected prospective airfoils have been leading renewable energy sources for generating electricity in identified and analyzed with the help of Qblade software. prospective regions around the globe. Nowadays, researchers are Results for a 3kW HAWT have also been validated with conducting different research activities to develop and optimize existing experimental results from Anderson et al [3]. The the existing designs of wind turbines through experimental and diversified computational techniques. Among the computational current research outcomes are expected to help the techniques, one of the popular choices is Computational Fluid prospective researchers to design optimized smaller-capacity Dynamics (CFD). However, CFD techniques are hardware HAWT for different prospective locations. intensive and computationally expensive. On the other hand, freely available simple tools like QBlade is computationally inexpensive and it can be used for performance and design analyses of horizontal and vertical axis wind turbines. In the present research, an attempt has been made to use QBlade for performance analyses of a smaller capacity horizontal axis wind turbine using selected prospective airfoils. In this study, four airfoils (namely, NACA 4412, SG6043, SD7062 and S833) have been selected and investigated in QBlade. It has been found that the overall power coefficients (CP) of NACA 4412 at different tip speed ratios are superior to the other three airfoils. -

Book of Abstracts
Book of abstracts 9th PhD Seminar on Wind Energy in Europe September 18-20, 2013 Uppsala University Campus Gotland, Sweden Campus Gotland WIND ENERGY Book of abstracts of 9th PhD Seminar on Wind Energy in Europe Uppsala University Campus Gotland, Sweden Campus Gotland, Wind Energy 621 67 Visby PREFACE The wind energy field is becoming more and more important in relation with future challenges of switching the world energy system to renewables. Therefore it is of high importance that tomorrow’s researchers in the field from all over the word meet and discuss future challenges. The 9th annual EAWE PhD seminar is in 2013 organized by Uppsala University Campus Gotland. This is a very suitable place for this event since it combines a unique historical environment with a sustainable profile and a long tradition of wind energy. Today about 45% of the energy consumption is locally produced by wind energy. Uppsala University Campus Gotland also has more than 10 years experience of teaching and research in the field with a focus on wind power project development. The aim with this seminar is to improve the international communication and information sharing of ongoing activities as well as simplify contact building between young researchers. It is also a perfect opportunity for PhD students to practice and improve their presentation and discussion skills. Associate Professor Stefan Ivanell Director, Wind Energy Uppsala University, Campus Gotland Book of abstracts of 9th PhD Seminar on Wind Energy in Europe September 18-20, 2013, Uppsala University Campus Gotland, Sweden TABLE OF CONTENTS ROTOR & WAKE AERODYNAMICS UNDERSTANDING THE WIND TURBINE BREAKDOWN MECHANISM WITH CFD M. -

Numerical Simulations of a Large Offshore Wind Turbine Exposed to Turbulent Inflow Conditions
9th European Seminar OWEMES 2017 Numerical simulations of a large offshore wind turbine exposed to turbulent inflow conditions Galih Bangga, Giorgia Guma, Thorsten Lutz and Ewald Krämer Institute of Aerodynamics and Gas Dynamics (IAG),University of Stuttgart, Germany [email protected] Abstract – The present works are intended to investigate the aerodynamic responses of a large generic 10MW offshore wind turbine under turbulent inflow conditions. The non-linear Lifting Line Free Vortex Wake Simulations approach is employed for this purpose computed using the QBlade code. In these studies, the effects of a three-dimensional (3D) correction model for the airfoil polars were studied in advance. For this purpose, the Blade Element Momentum computations employing the corrected polars are performed and compared to Computational Fluid Dynamics (CFD) simulations, and a good agreement is obtained between both employed approaches. Background turbulence is then imposed in the QLLT simulations with the turbulence intensities ranging from low to high turbulence levels (3% - 15%). Furthermore, the impact of wind shear from different locations (offshore and onshore) is investigated in the present works. 1. Introduction A fundamental issue in accurate estimation of the power output has been noted with the continuous increase of the offshore wind farm size which is partly contributed by difficulties in flow and wake modeling [1]. This is particularly caused by the complexity of the wake downstream of the turbine and their relationship with atmospheric variables such as the variability of wind speed, direction, turbulence and atmospheric stability that is not yet fully understood [2]. Further understanding of the relationships between these variables is required to improve the current state of the art wind farm and wake models. -

Selection Guidelines for Wind Energy Technologies
energies Review Selection Guidelines for Wind Energy Technologies A. G. Olabi 1,2,*, Tabbi Wilberforce 2, Khaled Elsaid 3,* , Tareq Salameh 1, Enas Taha Sayed 4,5, Khaled Saleh Husain 1 and Mohammad Ali Abdelkareem 1,4,5,* 1 Department of Sustainable and Renewable Energy Engineering, University of Sharjah, Sharjah 27272, United Arab Emirates; [email protected] (T.S.); [email protected] (K.S.H.) 2 Mechanical Engineering and Design, School of Engineering and Applied Science, Aston University, Aston Triangle, Birmingham B4 7ET, UK; [email protected] 3 Chemical Engineering Program, Texas A & M University at Qatar, Doha P.O. Box 23874, Qatar 4 Centre for Advanced Materials Research, University of Sharjah, Sharjah 27272, United Arab Emirates; [email protected] 5 Chemical Engineering Department, Faculty of Engineering, Minia University, Minya 615193, Egypt * Correspondence: [email protected] (A.G.O.); [email protected] (K.E.); [email protected] (M.A.A.) Abstract: The building block of all economies across the world is subject to the medium in which energy is harnessed. Renewable energy is currently one of the recommended substitutes for fossil fuels due to its environmentally friendly nature. Wind energy, which is considered as one of the promising renewable energy forms, has gained lots of attention in the last few decades due to its sustainability as well as viability. This review presents a detailed investigation into this technology as well as factors impeding its commercialization. General selection guidelines for the available wind turbine technologies are presented. Prospects of various components associated with wind energy conversion systems are thoroughly discussed with their limitations equally captured in this report. -
2012JRC Wind Status Report
2012 JRC wind status report Technology, market and economic aspects of wind energy in Europe Roberto Lacal Arántegui, main author. Teodora Corsatea and Kiti Suomalainen, contributing authors. 2012 Report EUR 25647 EN Cover picture: Sunset wind farm. © Jos Beurskens. European Commission Joint Research Centre Institute for Energy and Transport Contact information Roberto Lacal Arántegui Address: Joint Research Centre, Institute for Energy and Transport. Westerduinweg 3, NL-1755 LE Petten, The Netherlands E-mail: [email protected] Tel.: +31 224 56 53 90 Fax: +31 224 56 56 16 http://iet.jrc.ec.europa.eu http://www.jrc.ec.europa.eu This publication is a Reference Report by the Joint Research Centre of the European Commission. Legal Notice Neither the European Commission nor any person acting on behalf of the Commission is responsible for the use which might be made of this publication. Europe Direct is a service to help you find answers to your questions about the European Union Freephone number (*): 00 800 6 7 8 9 10 11 (*) Certain mobile telephone operators do not allow access to 00 800 numbers or these calls may be billed. A great deal of additional information on the European Union is available on the Internet. It can be accessed through the Europa server http://europa.eu/ JRC77895 EUR 25647 EN ISBN 978-92-79-27956-0 (print) ISBN 978-92-79-27955-3 (pdf) ISSN 1018-5593 (print) ISSN 1831-9424 (online) doi:10.2790/72509 Luxembourg: Publications Office of the European Union, 2013 © European Union, 2013 Reproduction is authorised provided the source is acknowledged. -

Design and Simulation of a Wind Turbine for Electricity Generation
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 13, Number 23 (2018) pp. 16409-164717 © Research India Publications. http://www.ripublication.com Design and Simulation of a Wind Turbine for Electricity Generation 1Daniyan, I. A., 2Daniyan, O. L., 3Adeodu, A. O., 3Azeez, T. M. and 3Ibekwe, K. S. 1Department of Industrial Engineering, Tshwane University of Technology, Pretoria, South Africa. 2Centre for Basic Space Science, University of Nigeria, Nsukka, Nigeria. 3Department of Mechanical & Engineering, Afe Babalola University, Ado Ekiti, Nigeria. Abstract per square meter of swept area of a turbine. The wind power density, measured in watts per square meter, shows how much This study is focuses on the design of a cost effective wind energy is accessible at the site for transformation by a wind turbine for electricity generation using locally sourced turbine Wind turbine can be vertical, horizontal upward or materials. The design of the turbine takes into the reduction in downward (; Gordan et al., 2001; Gasch et al., 2002; Horikiri, the weight and size of the turbine thereby lowering production 2011). Aerodynamic lift is the force that overcomes gravity and and installation costs. This increases the efficiency by is in a right angled direction to the wind flow. It occurs due to increasing the resistance from dynamic loads and reduction of the uneven at pressure on the upper and lower aerofoil surfaces acoustic noise discharge. The locally sourced materials (Gosh, 2002) while aerodynamic drag force is parallel to the employed include the; blades, hub, a permanent magnet motor direction of oncoming wind motion (Dabiri, 2011). Drag occurs as generator, tower, electric starter and fan as well as a due to uneven pressure on the upper and lower aerofoil surfaces controller.