Echolocation in Noctuidae (Lepidoptera)*
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Biological Surveys at Hunsbury Hill Country Park 2018
FRIENDS OF WEST HUNSBURY PARKS BIOLOGICAL SURVEYS AT HUNSBURY HILL COUNTRY PARK 2018 Ryan Clark Northamptonshire Biodiversity Records Centre April 2019 Northamptonshire Biodiversity Records Centre Introduction Biological records tell us which species are present on sites and are essential in informing the conservation and management of wildlife. In 2018, the Northamptonshire Biodiversity Records Centre ran a number of events to encourage biological recording at Hunsbury Hill Fort as part of the Friends of West Hunsbury Park’s project, which is supported by the National Lottery Heritage Fund. Hunsbury Hill Country Park is designated as a Local Wildlife Site (LWS). There are approximately 700 Local Wildlife Sites in Northamptonshire. Local Wildlife Sites create a network of areas, which are important as refuges for wildlife or wildlife corridors. Hunsbury Hill Country Park was designated as a LWS in 1992 for its woodland flora and the variety of habitats that the site possesses. The site also has a Local Geological Site (LGS) which highlights the importance of this site for its geology as well as biodiversity. This will be surveyed by the local geological group in due course. Hunsbury Hill Country Park Local Wildlife Site Boundary 1 Northamptonshire Biodiversity Records Centre (NBRC) supports the recording, curation and sharing of quality verified environmental information for sound decision-making. We hold nearly a million biological records covering a variety of different species groups. Before the start of this project, we looked to see which species had been recorded at the site. We were surprised to find that the only records we have for the site have come from Local Wildlife Site Surveys, which assess the quality of the site and focus on vascular plants, with some casual observations of other species noted too. -

Check List of Noctuid Moths (Lepidoptera: Noctuidae And
Бiологiчний вiсник МДПУ імені Богдана Хмельницького 6 (2), стор. 87–97, 2016 Biological Bulletin of Bogdan Chmelnitskiy Melitopol State Pedagogical University, 6 (2), pp. 87–97, 2016 ARTICLE UDC 595.786 CHECK LIST OF NOCTUID MOTHS (LEPIDOPTERA: NOCTUIDAE AND EREBIDAE EXCLUDING LYMANTRIINAE AND ARCTIINAE) FROM THE SAUR MOUNTAINS (EAST KAZAKHSTAN AND NORTH-EAST CHINA) A.V. Volynkin1, 2, S.V. Titov3, M. Černila4 1 Altai State University, South Siberian Botanical Garden, Lenina pr. 61, Barnaul, 656049, Russia. E-mail: [email protected] 2 Tomsk State University, Laboratory of Biodiversity and Ecology, Lenina pr. 36, 634050, Tomsk, Russia 3 The Research Centre for Environmental ‘Monitoring’, S. Toraighyrov Pavlodar State University, Lomova str. 64, KZ-140008, Pavlodar, Kazakhstan. E-mail: [email protected] 4 The Slovenian Museum of Natural History, Prešernova 20, SI-1001, Ljubljana, Slovenia. E-mail: [email protected] The paper contains data on the fauna of the Lepidoptera families Erebidae (excluding subfamilies Lymantriinae and Arctiinae) and Noctuidae of the Saur Mountains (East Kazakhstan). The check list includes 216 species. The map of collecting localities is presented. Key words: Lepidoptera, Noctuidae, Erebidae, Asia, Kazakhstan, Saur, fauna. INTRODUCTION The fauna of noctuoid moths (the families Erebidae and Noctuidae) of Kazakhstan is still poorly studied. Only the fauna of West Kazakhstan has been studied satisfactorily (Gorbunov 2011). On the faunas of other parts of the country, only fragmentary data are published (Lederer, 1853; 1855; Aibasov & Zhdanko 1982; Hacker & Peks 1990; Lehmann et al. 1998; Benedek & Bálint 2009; 2013; Korb 2013). In contrast to the West Kazakhstan, the fauna of noctuid moths of East Kazakhstan was studied inadequately. -
Botolph's Bridge, Hythe Redoubt, Hythe Ranges West And
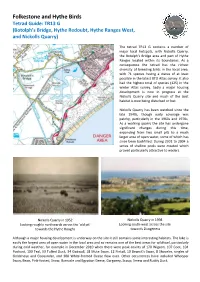
Folkestone and Hythe Birds Tetrad Guide: TR13 G (Botolph’s Bridge, Hythe Redoubt, Hythe Ranges West, and Nickolls Quarry) The tetrad TR13 G contains a number of major local hotspots, with Nickolls Quarry, the Botolph’s Bridge area and part of Hythe Ranges located within its boundaries. As a consequence the tetrad has the richest diversity of breeding birds in the local area, with 71 species having a status of at least possible in the latest BTO Atlas survey. It also had the highest total of species (125) in the winter Atlas survey. Sadly a major housing development is now in progress at the Nickolls Quarry site and much of the best habitat is now being disturbed or lost. Nickolls Quarry has been watched since the late 1940s, though early coverage was patchy, particularly in the 1960s and 1970s. As a working quarry the site has undergone significant changes during this time, expanding from two small pits to a much larger area of open water, some of which has since been backfilled. During 2001 to 2004 a series of shallow pools were created which proved particularly attractive to waders. Nickolls Quarry in 1952 Nickolls Quarry in 1998 Looking roughly northwards across the 'old pit' Looking south-west across the site towards the Hythe Roughs towards Dungeness Although a major housing development is underway on the site it still contains some interesting habitats. The lake is easily the largest area of open water in the local area and so remains one of the best areas for wildfowl, particularly during cold weather, for example in December 2010 when there were peak counts of 170 Wigeon, 107 Coot, 104 Pochard, 100 Teal, 53 Tufted Duck, 34 Gadwall, 18 Mute Swan, 12 Pintail, 10 Bewick’s Swan, 8 Shoveler, singles of Goldeneye and Goosander, and 300 White-fronted Geese flew over. -

The Evaluation of QM/MM-Driven Molecular Docking Combined With
Science, Technology and Innovation Original Research Notes on occurrence of moths (Lepidoptera, Heterocera) in Ksany village in the commune of Opatowiec of the Świętokrzyskie Province Klaudia Konopa and Janusz Fydaa,b* a University of Applied Sciences in Tarnów, Mickiewicza 8, Tarnów, 33-100, Poland b Jagiellonian University in Kraków, Faculty of Biology, Institute of Environmental Sciences, Gronostajowa 7, Kraków, 30-387, Poland * Corresponding author: [email protected] Abstract On selected days from July to September 2017, the butterfly species with twilight and nocturnal activity in the village of Ksany in agriculturally and little anthropogenically transferred land were studied. Catching was done in the evening and night hours, using a method of the vividly attracting to the light. Flying moths were photographed on-site for later determination. A total of 13 catches were carried out with an average at intervals of 1-2 weeks. Over 60 moths species were determined, mostly belonging to the families Geometridae and Erebidae. When analyzing the results of catches, basic weather parameters such as temperature, air pressure and moon phase were taken into account. KEYWORDS: moths, nocturnal butterflies, Heterocera, Geometridae, Erebidae, rapid inventory Introduction The butterflies (lepidopterans and moths) are one of the best known among all groups of insects. Among more than 160 thousands species occurring worldwide, there are 3258 butterfly species described only in Poland and belonging to 69 families. Butterflies with the night activity called usually the moths belong to 164 families, while those with daily activity count only 6 families. However, despite this facts night butterflies are much less known than Science, Technology and Innovation Original Research those which are active during the day [1]. -
Database of Irish Lepidoptera. 1 - Macrohabitats, Microsites and Traits of Noctuidae and Butterflies
Database of Irish Lepidoptera. 1 - Macrohabitats, microsites and traits of Noctuidae and butterflies Irish Wildlife Manuals No. 35 Database of Irish Lepidoptera. 1 - Macrohabitats, microsites and traits of Noctuidae and butterflies Ken G.M. Bond and Tom Gittings Department of Zoology, Ecology and Plant Science University College Cork Citation: Bond, K.G.M. and Gittings, T. (2008) Database of Irish Lepidoptera. 1 - Macrohabitats, microsites and traits of Noctuidae and butterflies. Irish Wildlife Manual s, No. 35. National Parks and Wildlife Service, Department of the Environment, Heritage and Local Government, Dublin, Ireland. Cover photo: Merveille du Jour ( Dichonia aprilina ) © Veronica French Irish Wildlife Manuals Series Editors: F. Marnell & N. Kingston © National Parks and Wildlife Service 2008 ISSN 1393 – 6670 Database of Irish Lepidoptera ____________________________ CONTENTS CONTENTS ........................................................................................................................................................1 ACKNOWLEDGEMENTS ....................................................................................................................................1 INTRODUCTION ................................................................................................................................................2 The concept of the database.....................................................................................................................2 The structure of the database...................................................................................................................2 -

B. Benedek, J. Babics, Zs. Bálint Faunistical Records and Annotations
РОССИЙСКАЯ АКАДЕМИЯ НАУК Южный научный центр RUSSIAN ACADEMY OF SCIENCES Southern Scientific Centre CAUCASIAN ENTOMOLOGICAL BULLETIN Том 17. Вып. 1 Vol. 17. No. 1 Ростов-на-Дону 2021 Кавказский энтомологический бюллетень 17(1): 61–76 © Caucasian Entomological Bulletin 2021 Faunistical records and annotations for a better knowledge of the Tajikistani moth and butterfly fauna (Lepidoptera: Noctuoidea, Papilionoidea) © B. Benedek1, J. Babics2, Zs. Bálint3 1Árpád str., 53, Törökbálint H-2045 Hungary. E-mail: [email protected] 2Május 1. str., Páty H-2071 Hungary. E-mail: [email protected] 3Hungarian Natural History Museum, Baross str., 13, Budapest H-1088 Hungary. E-mail: [email protected] Abstract. On the basis of 3333 specimens, geographical, spatial and temporal records of 225 noctuid and 37 papilionoid Lepidoptera species are given for the better knowledge of the fauna of Tajikistan. The following 25 species are recorded as new for the Tajikistani fauna: Agrotis golickei Ershov, 1871, Amphipyra cancellata Warren, 1911, Anapoma riparia (Boisduval, 1829), Archanara insoluta (Warren, 1911), Autophila einsleri Amsel, 1935, A. laetifica (Staudinger, 1901), A. maculifera Staudinger, 1888, Callopistria latreillei (Duponchel, 1827), Chazaria incarnata (Freyer, 1838), Chersotis lehmanni Varga, Gyulai, Ronkay et Ronkay 2013, Cirrhia tunicata (Graeser, 1890), Conistra pseudopolitina Hacker, 1990, Cryphia maeonis (Lederer, 1865), Cucullia tecca Püngeler, 1906, Dichagyris naumanni Varga, 1996, Episema minuta Boursin et Ebert, 1976, Eugnorisma cuneiferum Varga et L. Ronkay, 1994, Hypena opulenta (Christoph, 1877), Lophoterges varians Ronkay, 2005, Mniotype dubiosa (Bang-Haas, 1912), Namangana cretacea Staudinger, 1888, Nonagria puengeleri pringlei (Wiltshire, 1958), Orthosia reshoefti Hrebaly et Plante, 1994, Oxytripia orbiculosa (Esper, 1799) and Shargacucullia zerkowitzi (Boursin, 1934). -

Lepidoptera in Agricultural Landscapes – the Role of Field Margins, the Effects of Agrochemicals and Moth Pollination Services
Lepidoptera in agricultural landscapes – The role of field margins, the effects of agrochemicals and moth pollination services von Melanie Hahn aus Landau Angenommene Dissertation zur Erlangung des akademischen Grades eines Doktors der Naturwissenschaften Fachbereich 7: Natur-und Umweltwissenschaften Universität Koblenz-Landau Berichterstatter: Dr. Carsten Brühl, Landau Prof. Dr. Ralf Schulz, Landau Tag der Disputation: 22. September 2015 You cannot get through a single day without having an impact on the world around you. What you do makes a difference, and you have to decide what difference you want to make. Jane Goodall Danksagung Danksagung An dieser Stelle möchte ich mich ganz herzlich bei allen bedanken, die mich bei der Durchführung meiner Dissertation unterstützt haben! Mein besonderer Dank gilt: … Dr. Carsten Brühl, der nicht nur meine Begeisterung und Faszination für die Gruppe der Nachtfalter schon während meines Studiums geweckt hat, sondern mich auch in allen Phasen meiner Dissertation von der ersten Planung der Experimente bis zum Schreiben der Publikationen mit vielen Ideen und hilfreichen Diskussionen unterstützt und weitergebracht hat. Danke für die hervorragende Betreuung der Arbeit! … Prof. Dr. Ralf Schulz für die Ermöglichung meiner Dissertation am Institut für Umweltwissenschaften und auch für die Begutachtung dieser Arbeit. … Juliane Schmitz, die mir während der gesamten Zeit meiner Dissertation stets mit Rat und Tat zur Seite stand! Herzlichen Dank für die vielen fachlichen Gespräche und Diskussionen, die mir immer sehr weitergeholfen haben, die Hilfe bei der Durchführung der Labor- und Freilandexperimente, das sorgfältige Lesen der Manuskripte und natürlich für die schöne – wenn auch anstrengende – Zeit im Freiland. … Peter Stahlschmidt für die vielen fachlichen Diskussionen, die hilfreichen Anregungen und Kommentare zu den Manuskripten und natürlich auch für die Unterstützung bei meinem Freilandversuch. -

Taxonomic Study of the Genus Ceromya Robineau-Desvoidy Ofjapan
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Beiträge zur Entomologie = Contributions to Entomology... Beitr. Ent. Berlin ISSN 0005 - 805X 50 (2000) 1 S. 1 2 9 -1 5 0 11.04.2000 Taxonomic study of the genus Ceromya Robineau-Desvoidy ofJapan (Diptera: Tachinidae) 1 With 65 figures Takuji T a chi and H iroshi Sh im a Summary The Japanese species of the genus Cerom ya ROBINEAU-DESVOIDY are reviewed. Ten species are recognized, eight of which are classified in three species groups: the bicolor group, flaviseta group and silacea group. Two species, C. cothurnata and C. luteola, are treated as incertae sedis. The autapomor- phies of these species groups are redefined and characters illustrated: bicolor group - male genitalia: gonopod with lateral edge projected outwardly, flaviseta group - male genitalia: distiphallus in lateral view almost sclerotized, bearing small spinules ventrally, and lateral portion largely membranous, silacea group - male genitalia: distiphallus in lateral view broad, with posterolateral arm, and deeply bifurcated at apex in dorsal view; female terminalia: abdominal sterna 6-7 with minute setulae; first instar larva: labrum sharp and narrow apically. The follow ing six species are described from Japan: C. cothurnata sp. n., C. glaucescens sp. n., C. helvola sp. n., C. kurahashii sp. n., C. luteola sp. n., and C. prom inula sp. n. A key to the Japanese species is provided. Zusammenfassung Eine Übersicht über die japanischen Arten der Gattung Ceromya ROBINEAU-DESVOIDY wird gegeben. Zehn Arten werden als gültig anerkannt, wovon acht in die bicolor-, flaviseta- und silacea-Gruppe plaziert werden. -

The Lepidoptera of Bucharest and Its Surroundings (Romania)
Travaux du Muséum National d’Histoire Naturelle © 30 Décembre Vol. LIV (2) pp. 461–512 «Grigore Antipa» 2011 DOI: 10.2478/v10191-011-0028-9 THE LEPIDOPTERA OF BUCHAREST AND ITS SURROUNDINGS (ROMANIA) LEVENTE SZÉKELY Abstract. This study presents a synthesis of the current knowledge regarding the Lepidoptera fauna of Bucharest and the surrounding areas within a distance up to 50 kilometers around the Romanian capital. Data about the fauna composition are presented: the results of the research work beginning with the end of the 19th century, as well the results of the research work carried out in the last 15 years. The research initiated and done by the author himself, led to the identification of 180 species which were unknown in the past. Even if the natural habitats from this region have undergone through radical changes in the 20th century, the area still preserves a quite rich and interesting Lepidoptera fauna. The forests provide shelter to rich populations of the hawk moth Dolbina elegans A. Bang-Haas, 1912, one of the rarest Sphingidae in Europe, and some other species with high faunistical and zoogeographical value as: Noctua haywardi (Tams, 1926) (it is new record for the Romanian fauna from this area), Catocala dilecta (Hübner, 1808), Tarachidia candefacta (Hübner, [1831]), Chrysodeixis chalcites (Esper, [1789]), Aedia leucomelas (Linnaeus, 1758), and Hecatera cappa (Hübner, [1809]). We also present and discuss the current status of the protected Lepidoptera species from the surroundings of the Romanian capital for the first time. Résumé. Ce travail représente une synthèse des connaissances actuelles concernant la faune de lépidoptères de Bucarest et de ses zones limitrophes sur un rayon de 50 km autour de la capitale de la Roumanie. -

Ainoa Pravia Phd Thesis
THE RESPONSE OF ARTHROPOD ASSEMBLAGES TO PEATLAND RESTORATION IN FORMERLY AFFORESTED BLANKET BOG Ainoa Pravia Fernández BSc Biology, University of Oviedo (2007) MSc Wildlife Biology & Conservation, Edinburgh Napier University (2010) A thesis presented for the degree of Doctor of Philosophy to the University of Aberdeen May 2018 TABLE OF CONTENTS Table of Contents ............................................................................................................. 1 List of Figures .................................................................................................................... 7 List of Tables ..................................................................................................................... 14 Signed Declaration ............................................................................................................ 18 The Peat Bog in Forsinard ................................................................................................. 19 Acknowledgements .......................................................................................................... 20 Abbreviations .................................................................................................................... 21 Glossary ............................................................................................................................ 22 Nomenclature & Coding of Carabid Species ..................................................................... 27 Nomenclature & Coding of Moth Species ....................................................................... -

The Fauna of Lepidoptera Noctuoidea Moths in the State Biosphere Reservation of the Lower Amudarya
Journal of Critical Reviews ISSN- 2394-5125 Vol 7, Issue 5, 2020 Review Article THE FAUNA OF LEPIDOPTERA NOCTUOIDEA MOTHS IN THE STATE BIOSPHERE RESERVATION OF THE LOWER AMUDARYA 1Bekchanov Khudaybergan Urinovich, 2Bekchanov Muzaffar Khudaybergenovich, 3Bekchanova Mokhira Khudaybergan qizi 1Head of the Department of Methodology of the Preschool Education, Faculty of Pedagogy, Urgench State University, Urgench, Uzbekistan. 2PhD, Department of Soil Science, Faculty of Natural Sciences, Urgench State University, Khorezm, Uzbekistan. 3PhD student, Khorezm Mamun Academy, Khiva, Uzbekistan. Received: 10.01.2020 Revised: 04.02.2020 Accepted: 08.03.2020 Abstract Lepidoptera family of the Lower Amudarya State Biosphere Reserve has not been adequately studied yet. This research was carried out in order to determine the species composition of Lepidoptera family of the Lower Amudarya State Biosphere Reserve. The Noctuoidea group is a major species included in the Lepidoptera species. The research materials were collected in four refuges (Beruni, Kegeyli, Sultan, Amudarya) from March 2017 to November 2018. A list of species has been compiled in this region for two years. The obtained results show that in the studied area, 1,000 types of moths were collected. It was found out that they belong to the Noctuoidea family. DRL lamp handles were used for catching the moths. Red wine and sugar solutions were also used to attract moth butterflies. Keywords: fauna, Lepidoptera, Erebidae, Noctuidae, Uzbekistan, Karakalpakstan, biosphere, reserve. © 2019 by Advance Scientific Research. This is an open-access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/) DOI: http://dx.doi.org/10.31838/jcr.07.05.97 INTRODUCTION to conduct research and monitoring, to protect the socio- As a result of anthropogenic and environmental factors, such economic development of the region and to protect the as the drying of the seas, the deforestation of the thicket cultural values. -

Species Recorded Within and Around the Village of Kirkgunzeon
Species recorded within and around the village of Kirkgunzeon The following represents a list of the species recorded within 1km of the village of Kirkgunzeon (NX8666). The list was produced by South West Scotland Environmental Information Centre (SWSEIC) in Feb 2021. Taxon Group Recommended Common Name Recommended Name acarine (Acari) Aceria nalepai Aceria nalepai acarine (Acari) Eriophyes laevis Eriophyes laevis bird Mallard Anas platyrhynchos bird Greylag Goose Anser anser bird Pink-footed Goose Anser brachyrhynchus bird Shelduck Tadorna tadorna bird Oystercatcher Haematopus ostralegus bird European Herring Gull Larus argentatus bird Lesser Black-backed Gull Larus fuscus bird Curlew Numenius arquata bird Grey Heron Ardea cinerea bird Little Egret Egretta garzetta bird Woodpigeon Columba palumbus bird Collared Dove Streptopelia decaocto bird Kingfisher Alcedo atthis bird Cuckoo Cuculus canorus bird Sparrowhawk Accipiter nisus bird Buzzard Buteo buteo bird Red Kite Milvus milvus bird Peregrine Falco peregrinus bird Kestrel Falco tinnunculus bird Red-legged Partridge Alectoris rufa bird Moorhen Gallinula chloropus bird Eurasian Skylark Alauda arvensis bird Treecreeper Certhia familiaris bird Dipper Cinclus cinclus bird Northern Raven Corvus corax bird Carrion Crow Corvus corone bird Rook Corvus frugilegus bird Eurasian Magpie Pica pica bird Yellowhammer Emberiza citrinella bird Common Reed Bunting Emberiza schoeniclus bird Goldfinch Carduelis carduelis bird Greenfinch Chloris chloris bird Common Chaffinch Fringilla coelebs bird Eurasian