Radiation View Factors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 10 RADIOSITY METHOD
Chapter 10 RADIOSITY METHOD The radiosity metho d is based on the numerical solution of the shading equation by the nite element metho d. It sub divides the surfaces into small elemental surface patches. Supp osing these patches are small, their intensity distribution over the surface can b e approximated by a constant value which dep ends on the surface and the direction of the emission. We can get rid of this directional dep endency if only di use surfaces are allowed, since di use surfaces generate the same intensity in all directions. This is exactly the initial assumption of the simplest radiosity mo del, so we are also going to consider this limited case rst. Let the energy leaving a unit area of surface i in a unit time in all directions b e B , and assume that the light i density is homogeneous over the surface. This light density plays a crucial role in this mo del and is also called the radiosity of surface i. The dep endence of the intensityon B can b e expressed by the following i argument: 1. Consider a di erential dA element of surface A. The total energy leaving the surface dA in unit time is B dA, while the ux in the solid angle d! is d=IdA cos d! if is the angle b etween the surface normal and the direction concerned. 2. Expressing the total energy as the integration of the energy contribu- tions over the surface in all directions and assuming di use re ection 265 266 10. -

Classic Radiosity
Classic radiosity LiU, ITN, TNCG15 Ali Khashan, [email protected] Fredrik Salomonsson, [email protected] VT 10 Abstract This report describes how a classic radiosity method can be solved using the hemicube method to calculate form factors and sorting for optimizing. First the scene is discretized by subdividing the faces uniformly into smaller faces, called patches. At each patch a hemicube is created where the scene is projected down onto the current hemicube to determine the visibility each patch has. After the scene has been projected onto the hemicube form factors are calculated using the data from the hemicube, to determine how much the light contribution from light sources and other objects in the scene. Finally when the form factors has been calculated the radiosity equation can be solved. To choose witch patch to place the hemicube onto all patches are sorted with regard to the largest unshot energy. The patch that comes on top at iteration of the radiosity equation is the one which the hemicube is placed onto. The equation is solved until a convergence of radiosity is reached, meaning when the difference between a patch’s old radiosity and the newly calculated radiosity reaches a certain threshold the radiosity algorithim stops. After the scene is done Gouraud shading is applied to achieve the bleeding of light between patches and objects. The scene is presented with a room and a few simple primitives using C++ and OpenGL with Glut. The results can be visualized by solving the radiosity equation for each of the three color channels and then applying them on the corresponding vertices in the scene. -

Quantum Local Testability Arxiv:1911.03069
Quantum local testability arXiv:1911.03069 Anthony Leverrier, Inria (with Vivien Londe and Gilles Zémor) 27 nov 2019 Symmetry, Phases of Matter, and Resources in Quantum Computing A. Leverrier quantum LTC 27 nov 2019 1 / 25 We want: a local Hamiltonian such that I with degenerate ground space (quantum code) I the energy of an error scales linearly with the size of the error A. Leverrier quantum LTC 27 nov 2019 2 / 25 The current research on quantum error correction mostly concerned with the goal of building a (large) quantum computer desire for realistic constructions I LDPC codes: the generators of the stabilizer group act on a small number of qubits I spatial/geometrical locality: qubits on a 2D/3D lattice I main contenders: surface codes, or 3D variants A fairly reasonable and promising approach I good performance for topological codes: efficient decoders, high threshold I overhead still quite large for fault-tolerance (magic state distillation) but the numbers are improving regularly Is this it? A. Leverrier quantum LTC 27 nov 2019 3 / 25 Better quantum LDPC codes? from a math/coding point of view, topological codes in 2D-3D are not that good p I 2D toric code n, k = O(1), d = O( n) J K I topological codes on 2D Euclidean manifold (Bravyi, Poulin, Terhal 2010) kd2 ≤ cn I topological codes on 2D hyperbolic manifold (Delfosse 2014) kd2 ≤ c(log k)2n I things are better in 4D hyp. space: Guth-Lubotzky 2014 (also Londe-Leverrier 2018) n, k = Q(n), d = na , for a 2 [0.2, 0.3] J K what can we get by relaxing geometric locality in 3D? I we still want an LDPC construction, but allow for non local generators I a nice mathematical topic with many frustrating open questions! A. -

Self-Dual Configurations and Regular Graphs
SELF-DUAL CONFIGURATIONS AND REGULAR GRAPHS H. S. M. COXETER 1. Introduction. A configuration (mci ni) is a set of m points and n lines in a plane, with d of the points on each line and c of the lines through each point; thus cm = dn. Those permutations which pre serve incidences form a group, "the group of the configuration." If m — n, and consequently c = d, the group may include not only sym metries which permute the points among themselves but also reci procities which interchange points and lines in accordance with the principle of duality. The configuration is then "self-dual," and its symbol («<*, n<j) is conveniently abbreviated to na. We shall use the same symbol for the analogous concept of a configuration in three dimensions, consisting of n points lying by d's in n planes, d through each point. With any configuration we can associate a diagram called the Menger graph [13, p. 28],x in which the points are represented by dots or "nodes," two of which are joined by an arc or "branch" when ever the corresponding two points are on a line of the configuration. Unfortunately, however, it often happens that two different con figurations have the same Menger graph. The present address is concerned with another kind of diagram, which represents the con figuration uniquely. In this Levi graph [32, p. 5], we represent the points and lines (or planes) of the configuration by dots of two colors, say "red nodes" and "blue nodes," with the rule that two nodes differently colored are joined whenever the corresponding elements of the configuration are incident. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -
Angle Bisectors in a Quadrilateral Are Concurrent
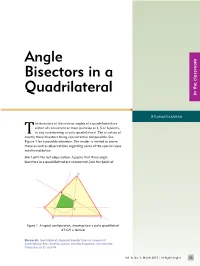
Angle Bisectors in a Quadrilateral in the classroom A Ramachandran he bisectors of the interior angles of a quadrilateral are either all concurrent or meet pairwise at 4, 5 or 6 points, in any case forming a cyclic quadrilateral. The situation of exactly three bisectors being concurrent is not possible. See Figure 1 for a possible situation. The reader is invited to prove these as well as observations regarding some of the special cases mentioned below. Start with the last observation. Assume that three angle bisectors in a quadrilateral are concurrent. Join the point of T D E H A F G B C Figure 1. A typical configuration, showing how a cyclic quadrilateral is formed Keywords: Quadrilateral, diagonal, angular bisector, tangential quadrilateral, kite, rhombus, square, isosceles trapezium, non-isosceles trapezium, cyclic, incircle 33 At Right Angles | Vol. 4, No. 1, March 2015 Vol. 4, No. 1, March 2015 | At Right Angles 33 D A D A D D E G A A F H G I H F F G E H B C E Figure 3. If is a parallelogram, then is a B C B C rectangle B C Figure 2. A tangential quadrilateral Figure 6. The case when is a non-isosceles trapezium: the result is that is a cyclic Figure 7. The case when has but A D quadrilateral in which : the result is that is an isosceles ∘ trapezium ( and ∠ ) E ∠ ∠ ∠ ∠ concurrence to the fourth vertex. Prove that this line indeed bisects the angle at the fourth vertex. F H Tangential quadrilateral A quadrilateral in which all the four angle bisectors G meet at a pointincircle is a — one which has an circle touching all the four sides. -

Scribability Problems for Polytopes
SCRIBABILITY PROBLEMS FOR POLYTOPES HAO CHEN AND ARNAU PADROL Abstract. In this paper we study various scribability problems for polytopes. We begin with the classical k-scribability problem proposed by Steiner and generalized by Schulte, which asks about the existence of d-polytopes that cannot be realized with all k-faces tangent to a sphere. We answer this problem for stacked and cyclic polytopes for all values of d and k. We then continue with the weak scribability problem proposed by Gr¨unbaum and Shephard, for which we complete the work of Schulte by presenting non weakly circumscribable 3-polytopes. Finally, we propose new (i; j)-scribability problems, in a strong and a weak version, which generalize the classical ones. They ask about the existence of d-polytopes that can not be realized with all their i-faces \avoiding" the sphere and all their j-faces \cutting" the sphere. We provide such examples for all the cases where j − i ≤ d − 3. Contents 1. Introduction 2 1.1. k-scribability 2 1.2. (i; j)-scribability 3 Acknowledgements 4 2. Lorentzian view of polytopes 4 2.1. Convex polyhedral cones in Lorentzian space 4 2.2. Spherical, Euclidean and hyperbolic polytopes 5 3. Definitions and properties 6 3.1. Strong k-scribability 6 3.2. Weak k-scribability 7 3.3. Strong and weak (i; j)-scribability 9 3.4. Properties of (i; j)-scribability 9 4. Weak scribability 10 4.1. Weak k-scribability 10 4.2. Weak (i; j)-scribability 13 5. Stacked polytopes 13 5.1. Circumscribability 14 5.2. -

Unilateral and Equitransitive Tilings by Equilateral Triangles
Discrete Mathematics 340 (2017) 1669–1680 Contents lists available at ScienceDirect Discrete Mathematics journal homepage: www.elsevier.com/locate/disc Unilateral and equitransitive tilings by equilateral trianglesI Rebekah Aduddell a, Morgan Ascanio b, Adam Deaton c, Casey Mann b,* a Texas Lutheran University, United States b University of Washington Bothell, United States c University of Texas, United States article info a b s t r a c t Article history: A tiling of the plane by polygons is unilateral if each edge of the tiling is a side of at most Received 6 July 2016 one polygon of the tiling. A tiling is equitransitive if for any two congruent tiles in the tiling, Received in revised form 18 October 2016 there exists a symmetry of the tiling mapping one to the other. It is known that a unilateral Accepted 31 October 2016 and equitransitive (UE) tiling can be made with any finite number of congruence classes of Available online 16 December 2016 squares. This article addresses the related question, raised in the book Tilings and Patterns by Keywords: Grünbaum and Shephard, of finding all UE tilings by equilateral triangles. In particular, we Tiling show that there are only two classes of UE tilings admitted by a finite number of congruence Triangles classes of equilateral triangles: one with two sizes of triangles and one with three sizes of Unilateral triangles. Equitransitive ' 2016 Published by Elsevier B.V. 1. Introduction A plane tiling T is a countable set of closed topological disks, fT1; T2; T3;:::g, that covers the plane without overlaps (i.e. -

Locally Spherical Hypertopes from Generalized Cubes
LOCALLY SPHERICAL HYPERTOPES FROM GENERLISED CUBES ANTONIO MONTERO AND ASIA IVIĆ WEISS Abstract. We show that every non-degenerate regular polytope can be used to construct a thin, residually-connected, chamber-transitive incidence geome- try, i.e. a regular hypertope, with a tail-triangle Coxeter diagram. We discuss several interesting examples derived when this construction is applied to gen- eralised cubes. In particular, we produce an example of a rank 5 finite locally spherical proper hypertope of hyperbolic type. 1. Introduction Hypertopes are particular kind of incidence geometries that generalise the no- tions of abstract polytopes and of hypermaps. The concept was introduced in [7] with particular emphasis on regular hypertopes (that is, the ones with highest de- gree of symmetry). Although in [6, 9, 8] a number of interesting examples had been constructed, within the theory of abstract regular polytopes much more work has been done. Notably, [20] and [22] deal with the universal constructions of polytopes, while in [3, 17, 18] the constructions with prescribed combinatorial conditions are explored. In another direction, in [2, 5, 11, 16] the questions of existence of poly- topes with prescribed (interesting) groups are investigated. Much of the impetus to the development of the theory of abstract polytopes, as well as the inspiration with the choice of problems, was based on work of Branko Grünbaum [10] from 1970s. In this paper we generalise the halving operation on polyhedra (see 7B in [13]) on a certain class of regular abstract polytopes to construct regular hypertopes. More precisely, given a regular non-degenerate n-polytope P, we construct a reg- ular hypertope H(P) related to semi-regular polytopes with tail-triangle Coxeter diagram. -
Computing Triangulations Using Oriented Matroids
Takustraße 7 Konrad-Zuse-Zentrum D-14195 Berlin-Dahlem fur¨ Informationstechnik Berlin Germany JULIAN PFEIFLE AND JORG¨ RAMBAU Computing Triangulations Using Oriented Matroids ZIB-Report 02-02 (January 2002) COMPUTING TRIANGULATIONS USING ORIENTED MATROIDS JULIAN PFEIFLE AND JORG¨ RAMBAU ABSTRACT. Oriented matroids are combinatorial structures that encode the combinatorics of point configurations. The set of all triangulations of a point configuration depends only on its oriented matroid. We survey the most important ingredients necessary to exploit ori- ented matroids as a data structure for computing all triangulations of a point configuration, and report on experience with an implementation of these concepts in the software package TOPCOM. Next, we briefly overview the construction and an application of the secondary polytope of a point configuration, and calculate some examples illustrating how our tools were integrated into the POLYMAKE framework. 1. INTRODUCTION This paper surveys efficient combinatorial methods to compute triangulations of point configurations. We present results obtained for the first time by a software implementation (TOPCOM [Ram99]) of these ideas. It turns out that a subset of all triangulations of a point configuration has a structure useful in different areas of mathematics, and we highlight one particular instance of such a connection. Finally, we calculate some examples by integrating TOPCOM into the POLYMAKE [GJ01] framework. Let us begin by motivating the use of triangulations and providing a precise definition. 1.1. Why triangulations? Triangulations are widely used as a standard tool to decom- pose complicated objects into simple objects. A solution to a problem on a complicated object can sometimes be found by gluing solutions on the simple objects. -

Quadrilateral Mesh Generation III : Optimizing Singularity Configuration Based on Abel-Jacobi Theory
Quadrilateral Mesh Generation III : Optimizing Singularity Configuration Based on Abel-Jacobi Theory Xiaopeng Zhenga,c, Yiming Zhua, Na Leia,d,∗, Zhongxuan Luoa,c, Xianfeng Gub aDalian University of Technology, Dalian, China bStony Brook University, New York, US cKey Laboratory for Ubiquitous Network and Service Software of Liaoning Province, Dalian, China dDUT-RU Co-Research Center of Advanced ICT for Active Life, Dalian, China Abstract This work proposes a rigorous and practical algorithm for generating mero- morphic quartic differentials for the purpose of quad-mesh generation. The work is based on the Abel-Jacobi theory of algebraic curve. The algorithm pipeline can be summarized as follows: calculate the homol- ogy group; compute the holomorphic differential group; construct the period matrix of the surface and Jacobi variety; calculate the Abel-Jacobi map for a given divisor; optimize the divisor to satisfy the Abel-Jacobi condition by an integer programming; compute the flat Riemannian metric with cone singulari- ties at the divisor by Ricci flow; isometric immerse the surface punctured at the divisor onto the complex plane and pull back the canonical holomorphic differ- ential to the surface to obtain the meromorphic quartic differential; construct the motor-graph to generate the resulting T-Mesh. The proposed method is rigorous and practical. The T-mesh results can be applied for constructing T-Spline directly. The efficiency and efficacy of the arXiv:2007.07334v1 [cs.CG] 10 Jul 2020 proposed algorithm are demonstrated by experimental results. Keywords: Quadrilateral Mesh, Abel-Jacobi, Flat Riemannian Metric, Geodesic, Discrete Ricci flow, Conformal Structure Deformation ∗Corresponding author Email address: [email protected] (Na Lei) Preprint submitted to Computer Methods in Applied Mechanics and EngineeringJuly 16, 2020 1. -

An Empirical Evaluation of a Gpu Radiosity Solver
AN EMPIRICAL EVALUATION OF A GPU RADIOSITY SOLVER Guenter Wallner Institute for Art and Technology, University of Applied Arts, Oskar Kokoschka Platz 2, Vienna, Austria Keywords: Global illumination, Radiosity, GPU programming, Projections. Abstract: This paper presents an empirical evaluation of a GPU radiosity solver which was described in the authors pre- vious work. The implementation is evaluated in regard to rendering times in comparision with a classical CPU implementation. Results show that the GPU implementation outperforms the CPU algorithm in most cases, most importantly, in cases where the number of radiosity elements is high. Furthermore, the impact of the projection – which is used for determining the visibility – on the quality of the rendering is assessed. Results gained with a hemispherical projection performed in a vertex shader and with a real non-linear hemispherical projection are compared against the results of the hemicube method. Based on the results of the evaluation, possible improvements for further research are pointed out. 1 INTRODUCTION point out possible improvements for further develop- ment. The reminder of this paper is structured as follows. Radiosity has been and is still a widely used tech- Section 2 gives a short overview of the various steps nique to simulate diffuse interreflections in three- of the radiosity implementation. In Section 3 timings dimensional scenes. Radiosity methods were first de- for the individual steps are given for a set of sample veloped in the field of heat transfer and in 1984 gener- scenes. Section 4 compares rendering times with a alized for computer graphics by (Goral et al., 1984). CPU implementation and the impact of the applied Since then, many variations of the original formula- projection on the quality of the result is discussed in tion have been proposed, leading to a rich body of Section 5.