Spaces of Polygons in the Plane and Morse Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hirschdx.Pdf
130 5. Degrees, Intersection Numbers, and the Euler Characteristic. 2. Intersection Numbers and the Euler Characteristic M c: Jr+1 Exercises 8. Let be a compad lHlimensionaJ submanifold without boundary. Two points x, y E R"+' - M are separated by M if and only if lkl(x,Y}.MI * O. lSee 1. A complex polynomial of degree n defines a map of the Riemann sphere to itself Exercise 7.) of degree n. What is the degree of the map defined by a rational function p(z)!q(z)? 9. The Hopfinvariant ofa map f:5' ~ 5' is defined to be the linking number Hlf) ~ 2. (a) Let M, N, P be compact connected oriented n·manifolds without boundaries Lk(g-l(a),g-l(b)) (see Exercise 7) where 9 is a c~ map homotopic 10 f and a, b are and M .!, N 1. P continuous maps. Then deg(fg) ~ (deg g)(deg f). The same holds distinct regular values of g. The linking number is computed in mod 2 if M, N, P are not oriented. (b) The degree of a homeomorphism or homotopy equivalence is ± 1. f(c) * a, b. *3. Let IDl. be the category whose objects are compact connected n-manifolds and whose (a) H(f) is a well-defined homotopy invariant off which vanishes iff is nuD homo- topic. morphisms are homotopy classes (f] of maps f:M ~ N. For an object M let 7t"(M) (b) If g:5' ~ 5' has degree p then H(fg) ~ pH(f). be the set of homotopy classes M ~ 5". -

New Ideas in Algebraic Topology (K-Theory and Its Applications)
NEW IDEAS IN ALGEBRAIC TOPOLOGY (K-THEORY AND ITS APPLICATIONS) S.P. NOVIKOV Contents Introduction 1 Chapter I. CLASSICAL CONCEPTS AND RESULTS 2 § 1. The concept of a fibre bundle 2 § 2. A general description of fibre bundles 4 § 3. Operations on fibre bundles 5 Chapter II. CHARACTERISTIC CLASSES AND COBORDISMS 5 § 4. The cohomological invariants of a fibre bundle. The characteristic classes of Stiefel–Whitney, Pontryagin and Chern 5 § 5. The characteristic numbers of Pontryagin, Chern and Stiefel. Cobordisms 7 § 6. The Hirzebruch genera. Theorems of Riemann–Roch type 8 § 7. Bott periodicity 9 § 8. Thom complexes 10 § 9. Notes on the invariance of the classes 10 Chapter III. GENERALIZED COHOMOLOGIES. THE K-FUNCTOR AND THE THEORY OF BORDISMS. MICROBUNDLES. 11 § 10. Generalized cohomologies. Examples. 11 Chapter IV. SOME APPLICATIONS OF THE K- AND J-FUNCTORS AND BORDISM THEORIES 16 § 11. Strict application of K-theory 16 § 12. Simultaneous applications of the K- and J-functors. Cohomology operation in K-theory 17 § 13. Bordism theory 19 APPENDIX 21 The Hirzebruch formula and coverings 21 Some pointers to the literature 22 References 22 Introduction In recent years there has been a widespread development in topology of the so-called generalized homology theories. Of these perhaps the most striking are K-theory and the bordism and cobordism theories. The term homology theory is used here, because these objects, often very different in their geometric meaning, Russian Math. Surveys. Volume 20, Number 3, May–June 1965. Translated by I.R. Porteous. 1 2 S.P. NOVIKOV share many of the properties of ordinary homology and cohomology, the analogy being extremely useful in solving concrete problems. -

On the Homology of Configuration Spaces
TopologyVol. 28, No. I. pp. I II-123, 1989 Lmo-9383 89 53 al+ 00 Pm&d I” Great Bntam fy 1989 Pcrgamon Press plc ON THE HOMOLOGY OF CONFIGURATION SPACES C.-F. B~DIGHEIMER,~ F. COHEN$ and L. TAYLOR: (Receiued 27 July 1987) 1. INTRODUCTION 1.1 BY THE k-th configuration space of a manifold M we understand the space C”(M) of subsets of M with catdinality k. If c’(M) denotes the space of k-tuples of distinct points in M, i.e. Ck(M) = {(z,, . , zk)eMklzi # zj for i #j>, then C’(M) is the orbit space of C’(M) under the permutation action of the symmetric group Ik, c’(M) -+ c’(M)/E, = Ck(M). Configuration spaces appear in various contexts such as algebraic geometry, knot theory, differential topology or homotopy theory. Although intensively studied their homology is unknown except for special cases, see for example [ 1, 2, 7, 8, 9, 12, 13, 14, 18, 261 where different terminology and notation is used. In this article we study the Betti numbers of Ck(M) for homology with coefficients in a field IF. For IF = IF, the rank of H,(C’(M); IF,) is determined by the IF,-Betti numbers of M. the dimension of M, and k. Similar results were obtained by Ldffler-Milgram [ 171 for closed manifolds. For [F = ff, or a field of characteristic zero the corresponding result holds in the case of odd-dimensional manifolds; it is no longer true for even-dimensional manifolds, not even for surfaces, see [S], [6], or 5.5 here. -

Floer Homology, Gauge Theory, and Low-Dimensional Topology
Floer Homology, Gauge Theory, and Low-Dimensional Topology Clay Mathematics Proceedings Volume 5 Floer Homology, Gauge Theory, and Low-Dimensional Topology Proceedings of the Clay Mathematics Institute 2004 Summer School Alfréd Rényi Institute of Mathematics Budapest, Hungary June 5–26, 2004 David A. Ellwood Peter S. Ozsváth András I. Stipsicz Zoltán Szabó Editors American Mathematical Society Clay Mathematics Institute 2000 Mathematics Subject Classification. Primary 57R17, 57R55, 57R57, 57R58, 53D05, 53D40, 57M27, 14J26. The cover illustrates a Kinoshita-Terasaka knot (a knot with trivial Alexander polyno- mial), and two Kauffman states. These states represent the two generators of the Heegaard Floer homology of the knot in its topmost filtration level. The fact that these elements are homologically non-trivial can be used to show that the Seifert genus of this knot is two, a result first proved by David Gabai. Library of Congress Cataloging-in-Publication Data Clay Mathematics Institute. Summer School (2004 : Budapest, Hungary) Floer homology, gauge theory, and low-dimensional topology : proceedings of the Clay Mathe- matics Institute 2004 Summer School, Alfr´ed R´enyi Institute of Mathematics, Budapest, Hungary, June 5–26, 2004 / David A. Ellwood ...[et al.], editors. p. cm. — (Clay mathematics proceedings, ISSN 1534-6455 ; v. 5) ISBN 0-8218-3845-8 (alk. paper) 1. Low-dimensional topology—Congresses. 2. Symplectic geometry—Congresses. 3. Homol- ogy theory—Congresses. 4. Gauge fields (Physics)—Congresses. I. Ellwood, D. (David), 1966– II. Title. III. Series. QA612.14.C55 2004 514.22—dc22 2006042815 Copying and reprinting. Material in this book may be reproduced by any means for educa- tional and scientific purposes without fee or permission with the exception of reproduction by ser- vices that collect fees for delivery of documents and provided that the customary acknowledgment of the source is given. -

Self-Dual Configurations and Regular Graphs
SELF-DUAL CONFIGURATIONS AND REGULAR GRAPHS H. S. M. COXETER 1. Introduction. A configuration (mci ni) is a set of m points and n lines in a plane, with d of the points on each line and c of the lines through each point; thus cm = dn. Those permutations which pre serve incidences form a group, "the group of the configuration." If m — n, and consequently c = d, the group may include not only sym metries which permute the points among themselves but also reci procities which interchange points and lines in accordance with the principle of duality. The configuration is then "self-dual," and its symbol («<*, n<j) is conveniently abbreviated to na. We shall use the same symbol for the analogous concept of a configuration in three dimensions, consisting of n points lying by d's in n planes, d through each point. With any configuration we can associate a diagram called the Menger graph [13, p. 28],x in which the points are represented by dots or "nodes," two of which are joined by an arc or "branch" when ever the corresponding two points are on a line of the configuration. Unfortunately, however, it often happens that two different con figurations have the same Menger graph. The present address is concerned with another kind of diagram, which represents the con figuration uniquely. In this Levi graph [32, p. 5], we represent the points and lines (or planes) of the configuration by dots of two colors, say "red nodes" and "blue nodes," with the rule that two nodes differently colored are joined whenever the corresponding elements of the configuration are incident. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -

Differential Topology from the Point of View of Simple Homotopy Theory
PUBLICATIONS MATHÉMATIQUES DE L’I.H.É.S. BARRY MAZUR Differential topology from the point of view of simple homotopy theory Publications mathématiques de l’I.H.É.S., tome 15 (1963), p. 5-93 <http://www.numdam.org/item?id=PMIHES_1963__15__5_0> © Publications mathématiques de l’I.H.É.S., 1963, tous droits réservés. L’accès aux archives de la revue « Publications mathématiques de l’I.H.É.S. » (http:// www.ihes.fr/IHES/Publications/Publications.html) implique l’accord avec les conditions géné- rales d’utilisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou im- pression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ CHAPTER 1 INTRODUCTION It is striking (but not uncharacteristic) that the « first » question asked about higher dimensional geometry is yet unsolved: Is every simply connected 3-manifold homeomorphic with S3 ? (Its original wording is slightly more general than this, and is false: H. Poincare, Analysis Situs (1895).) The difficulty of this problem (in fact of most three-dimensional problems) led mathematicians to veer away from higher dimensional geometric homeomorphism-classificational questions. Except for Whitney's foundational theory of differentiable manifolds and imbed- dings (1936) and Morse's theory of Calculus of Variations in the Large (1934) and, in particular, his analysis of the homology structure of a differentiable manifold by studying critical points of 0°° functions defined on the manifold, there were no classificational results about high dimensional manifolds until the era of Thorn's Cobordisme Theory (1954), the beginning of" modern 9? differential topology. -

Topics in Low Dimensional Computational Topology
THÈSE DE DOCTORAT présentée et soutenue publiquement le 7 juillet 2014 en vue de l’obtention du grade de Docteur de l’École normale supérieure Spécialité : Informatique par ARNAUD DE MESMAY Topics in Low-Dimensional Computational Topology Membres du jury : M. Frédéric CHAZAL (INRIA Saclay – Île de France ) rapporteur M. Éric COLIN DE VERDIÈRE (ENS Paris et CNRS) directeur de thèse M. Jeff ERICKSON (University of Illinois at Urbana-Champaign) rapporteur M. Cyril GAVOILLE (Université de Bordeaux) examinateur M. Pierre PANSU (Université Paris-Sud) examinateur M. Jorge RAMÍREZ-ALFONSÍN (Université Montpellier 2) examinateur Mme Monique TEILLAUD (INRIA Sophia-Antipolis – Méditerranée) examinatrice Autre rapporteur : M. Eric SEDGWICK (DePaul University) Unité mixte de recherche 8548 : Département d’Informatique de l’École normale supérieure École doctorale 386 : Sciences mathématiques de Paris Centre Numéro identifiant de la thèse : 70791 À Monsieur Lagarde, qui m’a donné l’envie d’apprendre. Résumé La topologie, c’est-à-dire l’étude qualitative des formes et des espaces, constitue un domaine classique des mathématiques depuis plus d’un siècle, mais il n’est apparu que récemment que pour de nombreuses applications, il est important de pouvoir calculer in- formatiquement les propriétés topologiques d’un objet. Ce point de vue est la base de la topologie algorithmique, un domaine très actif à l’interface des mathématiques et de l’in- formatique auquel ce travail se rattache. Les trois contributions de cette thèse concernent le développement et l’étude d’algorithmes topologiques pour calculer des décompositions et des déformations d’objets de basse dimension, comme des graphes, des surfaces ou des 3-variétés. -
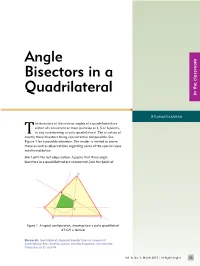
Angle Bisectors in a Quadrilateral Are Concurrent
Angle Bisectors in a Quadrilateral in the classroom A Ramachandran he bisectors of the interior angles of a quadrilateral are either all concurrent or meet pairwise at 4, 5 or 6 points, in any case forming a cyclic quadrilateral. The situation of exactly three bisectors being concurrent is not possible. See Figure 1 for a possible situation. The reader is invited to prove these as well as observations regarding some of the special cases mentioned below. Start with the last observation. Assume that three angle bisectors in a quadrilateral are concurrent. Join the point of T D E H A F G B C Figure 1. A typical configuration, showing how a cyclic quadrilateral is formed Keywords: Quadrilateral, diagonal, angular bisector, tangential quadrilateral, kite, rhombus, square, isosceles trapezium, non-isosceles trapezium, cyclic, incircle 33 At Right Angles | Vol. 4, No. 1, March 2015 Vol. 4, No. 1, March 2015 | At Right Angles 33 D A D A D D E G A A F H G I H F F G E H B C E Figure 3. If is a parallelogram, then is a B C B C rectangle B C Figure 2. A tangential quadrilateral Figure 6. The case when is a non-isosceles trapezium: the result is that is a cyclic Figure 7. The case when has but A D quadrilateral in which : the result is that is an isosceles ∘ trapezium ( and ∠ ) E ∠ ∠ ∠ ∠ concurrence to the fourth vertex. Prove that this line indeed bisects the angle at the fourth vertex. F H Tangential quadrilateral A quadrilateral in which all the four angle bisectors G meet at a pointincircle is a — one which has an circle touching all the four sides. -

Scribability Problems for Polytopes
SCRIBABILITY PROBLEMS FOR POLYTOPES HAO CHEN AND ARNAU PADROL Abstract. In this paper we study various scribability problems for polytopes. We begin with the classical k-scribability problem proposed by Steiner and generalized by Schulte, which asks about the existence of d-polytopes that cannot be realized with all k-faces tangent to a sphere. We answer this problem for stacked and cyclic polytopes for all values of d and k. We then continue with the weak scribability problem proposed by Gr¨unbaum and Shephard, for which we complete the work of Schulte by presenting non weakly circumscribable 3-polytopes. Finally, we propose new (i; j)-scribability problems, in a strong and a weak version, which generalize the classical ones. They ask about the existence of d-polytopes that can not be realized with all their i-faces \avoiding" the sphere and all their j-faces \cutting" the sphere. We provide such examples for all the cases where j − i ≤ d − 3. Contents 1. Introduction 2 1.1. k-scribability 2 1.2. (i; j)-scribability 3 Acknowledgements 4 2. Lorentzian view of polytopes 4 2.1. Convex polyhedral cones in Lorentzian space 4 2.2. Spherical, Euclidean and hyperbolic polytopes 5 3. Definitions and properties 6 3.1. Strong k-scribability 6 3.2. Weak k-scribability 7 3.3. Strong and weak (i; j)-scribability 9 3.4. Properties of (i; j)-scribability 9 4. Weak scribability 10 4.1. Weak k-scribability 10 4.2. Weak (i; j)-scribability 13 5. Stacked polytopes 13 5.1. Circumscribability 14 5.2. -

Unilateral and Equitransitive Tilings by Equilateral Triangles
Discrete Mathematics 340 (2017) 1669–1680 Contents lists available at ScienceDirect Discrete Mathematics journal homepage: www.elsevier.com/locate/disc Unilateral and equitransitive tilings by equilateral trianglesI Rebekah Aduddell a, Morgan Ascanio b, Adam Deaton c, Casey Mann b,* a Texas Lutheran University, United States b University of Washington Bothell, United States c University of Texas, United States article info a b s t r a c t Article history: A tiling of the plane by polygons is unilateral if each edge of the tiling is a side of at most Received 6 July 2016 one polygon of the tiling. A tiling is equitransitive if for any two congruent tiles in the tiling, Received in revised form 18 October 2016 there exists a symmetry of the tiling mapping one to the other. It is known that a unilateral Accepted 31 October 2016 and equitransitive (UE) tiling can be made with any finite number of congruence classes of Available online 16 December 2016 squares. This article addresses the related question, raised in the book Tilings and Patterns by Keywords: Grünbaum and Shephard, of finding all UE tilings by equilateral triangles. In particular, we Tiling show that there are only two classes of UE tilings admitted by a finite number of congruence Triangles classes of equilateral triangles: one with two sizes of triangles and one with three sizes of Unilateral triangles. Equitransitive ' 2016 Published by Elsevier B.V. 1. Introduction A plane tiling T is a countable set of closed topological disks, fT1; T2; T3;:::g, that covers the plane without overlaps (i.e. -
Computing Triangulations Using Oriented Matroids
Takustraße 7 Konrad-Zuse-Zentrum D-14195 Berlin-Dahlem fur¨ Informationstechnik Berlin Germany JULIAN PFEIFLE AND JORG¨ RAMBAU Computing Triangulations Using Oriented Matroids ZIB-Report 02-02 (January 2002) COMPUTING TRIANGULATIONS USING ORIENTED MATROIDS JULIAN PFEIFLE AND JORG¨ RAMBAU ABSTRACT. Oriented matroids are combinatorial structures that encode the combinatorics of point configurations. The set of all triangulations of a point configuration depends only on its oriented matroid. We survey the most important ingredients necessary to exploit ori- ented matroids as a data structure for computing all triangulations of a point configuration, and report on experience with an implementation of these concepts in the software package TOPCOM. Next, we briefly overview the construction and an application of the secondary polytope of a point configuration, and calculate some examples illustrating how our tools were integrated into the POLYMAKE framework. 1. INTRODUCTION This paper surveys efficient combinatorial methods to compute triangulations of point configurations. We present results obtained for the first time by a software implementation (TOPCOM [Ram99]) of these ideas. It turns out that a subset of all triangulations of a point configuration has a structure useful in different areas of mathematics, and we highlight one particular instance of such a connection. Finally, we calculate some examples by integrating TOPCOM into the POLYMAKE [GJ01] framework. Let us begin by motivating the use of triangulations and providing a precise definition. 1.1. Why triangulations? Triangulations are widely used as a standard tool to decom- pose complicated objects into simple objects. A solution to a problem on a complicated object can sometimes be found by gluing solutions on the simple objects.