Laser Beacon Tracking for Free-Space Optical Communication
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

New Capabilities for All-Weather Microwave Atmospheric Sensing Using Cubesats and Constellations
SSC18-II-07 New Capabilities for All-Weather Microwave Atmospheric Sensing Using CubeSats and Constellations W. Blackwell, K. Clark, D. Cousins, D. Crompton, A. Cunningham, M. Diliberto, L. Fuhrman, R. Leslie, I. Osaretin, and S. Michael MIT Lincoln Laboratory [email protected] ABSTRACT Three MIT Lincoln Laboratory nanosatellite missions flying microwave radiometers for high-resolution atmospheric sensing are in varying stages of development. Microwave instrumentation is particularly well suited for implementation on a very small satellite, as the sensor requirements for power, pointing, and spatial resolution (aperture size) can be accommodated by a nanosatellite platform. The Microsized Microwave Atmospheric Satellite Version 2a (MicroMAS-2a), launched on January 11, 2018 and has demonstrated temperature sounding using channels near 118 GHz and humidity sounding using channels near 183 GHz. A second MicroMAS-2 flight unit (MicroMAS-2b) will be launched in Fall 2018 as part of ELANA-XX. The Time-Resolved Observations of Precipitation structure and storm Intensity with a Constellation of Smallsats (TROPICS) mission was selected by NASA in 2016 as part of the Earth Venture–Instrument (EVI-3) program. The overarching goal for TROPICS is to provide nearly all-weather observations of 3-D temperature and humidity, as well as cloud ice and precipitation horizontal structure, at high temporal resolution to conduct high-value science investigations of tropical cyclones. TROPICS will provide rapid-refresh microwave measurements (median refresh rate of approximately 40 minutes for the baseline mission) over the tropics that can be used to observe the thermodynamics of the troposphere and precipitation structure for storm systems at the mesoscale and synoptic scale over the entire storm lifecycle. -

Outcome Budget of the Department of Space Government of India 2013-2014 Contents
OUTCOME BUDGET OF THE DEPARTMENT OF SPACE GOVERNMENT OF INDIA 2013-2014 CONTENTS Page Nos. Executive Summary (i) - (ii) Introduction (Organisational Set-up, Major Projects/ Programmes of Department of Space, Overview Chapter I of 12th Five Year Plan 2012-2017 proposals, 1-13 Mandate and Policy framework of Department of Space) Chapter II Outcome Budget 2013-2014 15-60 Chapter III Reform measures and Policy initiatives 61-62 Review of Performance of the Major ongoing Chapter IV 63-102 Projects/Programmes/Centres of DOS/ISRO Chapter V Financial Review 103-110 Chapter VI Autonomous Bodies of DOS/ISRO 111-119 Annexure Major Indian Space Missions EXECUTIVE SUMMARY i. The primary objective of the Indian Space Programme is to achieve self-reliance in Space Technology and to evolve application programme to meet the developmental needs of the country. Towards meeting this objective, two major operational space systems have been established – the Indian National Satellite (INSAT) for telecommunication, television broadcasting and meteorological service and the Indian Remote Sensing Satellite (IRS) for natural resource monitoring and management. Two operational launch vehicles, Polar Satellite Launch Vehicle (PSLV) and Geosynchronous Satellite Launch Vehicle (GSLV) provide self reliance in launching IRS & INSAT Satellites respectively. ii. The Department of Space (DOS) and the Space Commission was set up in 1972 to formulate and implement Space policies and programmes in the country. The Indian Space Research Organisation (ISRO) is the research and development wing of the Department of Space and is responsible for executing the programmes and schemes of the Department in accordance with the directives and policies laid down by the Space Commission and the DOS. -
Instrument Intercomparison – Paul Simona 1 DRAGON ADVANCED TRAINING COURSE in ATMOSPHERE REMOTE SENSING Atmospheric Remote Sensing Measurements
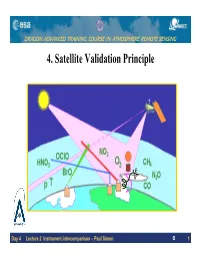
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING 4. Satellite Validation Principle C o r r e l a t i v e D a t Day 4 Lecture 2 Instrument intercomparison – Paul Simona 1 DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING Atmospheric Remote Sensing Measurements • Atmosphere is continuously changing in time and space. => No repeated measurements of the same quantity. • Radiation field measurements are direct, all other are indirect • Measurements probe large atmospheric volume => Large averaging and validation by in situ measurements difficult Courtesy Erkki Kyrola Day 4 Lecture 2 Instrument intercomparison – Paul Simon 2 DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING Atmospheric Satellite Sensors We launch a satellite sensor for dedicated purposes: Meteorology, dynamical tracer, surface UV monitoring; Global climatology; Montreal and Kyoto Protocol related issues; Atmospheric processes: polar chemistry, etc.; Tropospheric issues like pollution, biomass burning, oxidizing capacity…; Radiative Transfer and Chemical Transport modelling. Day 4 Lecture 2 Instrument intercomparison – Paul Simon 3 DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING Satellite Validation Principles Ideally, the observations of atmospheric constituents must not be dependent on: ¾ the atmospheric temperature; ¾ the abundance of other species; ¾ the Sun elevation; ¾ the presence of clouds; ¾ the instrument degradation (aging); ¾ etc… Day 4 Lecture 2 Instrument intercomparison – Paul Simon 4 DRAGON ADVANCED TRAINING -
Helsinki University of Technology
Aalto University School of Science Degree Programme in Industrial Engineering and Management Timo Tuomivirta Energy management in neighbourhoods Master’s Thesis Espoo, 07/06/2016 Supervisor: Professor Jan Holmström Instructor: M.Sc. Olli Nummelin Title of thesis Energy management in neighbourhoods Degree programme Industrial Engineering and Management Major Industrial Management Code of major TU-22 Supervisor Professor Jan Holmström Thesis advisor M.Sc. Jan Holmström Date 07.06.2016 Number of pages 115+67 Language English The topic of the thesis was to structure, refine, combine, analyse, and model data from real estate. Possibilities to adjust the relationship of utilities demand and supply were evaluated. The information collected from real estate was composed of real estate level and apartment level data. Real estate level data included weather, heating circuit, cooling circuit and domestic water. The apartment level data included room temperature switch, room operating panel and domestic hot-, and cold water consumption. The apartment specific data were aggregated on real estate level. First the interrelation of sub meters and utility companies billing were formed. After that the differences between measurements and company billing were evaluated. Then system specifically on certain time resolution the temperature of supply and return water, electricity consumption, heat energy consumption and cool energy consumption were determined. Hot water, cold water and overall water consumption on certain time resolution were determined. Furthermore, the seasonal ratio of hot and cold water was evaluated. From cold water station related data sample width specific energy efficiency ratio were calculated. From room temperature switch and room operating panel real estate level analysis were aggregated. -

The Technologies That Could Prevent More Mysteries Like That of Missing Malaysia Airlines Flight 370 Page 20
July-August 2014 The technologies that could prevent more mysteries like that of missing Malaysia Airlines Flight 370 Page 20 Hypersonics after WaveRider p.10 40 tons on a dime at Mars p. 36 A PUBLICATION OF THE AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS AIAA Progress in Astronautics and Aeronautics AIAA’s popular book series Progress in Astronautics and Aeronautics features books that present a particular, well- defi ned subject refl ecting advances in the fi elds of aerospace science, engineering, and/or technology. POPULAR TITLES Tactical and Strategic Missile Guidance, Sixth Edition Paul Zarchan 1026 pages This best-selling title provides an in-depth look at tactical and strategic missile guidance using common language, notation, and perspective. The sixth edition includes six new chapters on topics related to improving missile guidance system performance and understanding key design concepts and tradeoffs. ISBN: 978-1-60086-894-8 List Price: $134.95 “AIAA Best Seller” AIAA Member Price: $104.95 Morphing Aerospace Vehicles and Structures John Valasek 286 pages Morphing Aerospace Vehicles and Structures is a synthesis of the relevant disciplines and applications involved in the morphing of fi xed wing fl ight vehicles. The book is organized into three major sections: Bio-Inspiration; Control and Dynamics; and Smart Materials and Structures. Most chapters are both tutorial and research-oriented in nature, covering elementary concepts through advanced – and in many cases novel – methodologies. ISBN: 978-1-60086-903-7 “Features the -

(NUCAPS): Algorithm Theoretical Basis Documentation
The NOAA Unique CrIS/ATMS Processing System (NUCAPS): Algorithm Theoretical Basis Documentation Prepared by Antonia Gambacorta [email protected] NOAA Center for Weather and Climate Prediction (NCWCP) 5830 University Research Court 2nd Floor, Office 2684 College Park, MD 20740-3818 USA phone: 301-613-3539 Version 1.0 August 21, 2013 Contents 1 Introduction 1 1.1 References . 2 2 Satellite instrument Description 3 2.1 The Advanced Technology Microwave Sounder (ATMS) . 3 2.2 The Cross-Track Infrared Sounder (CrIS) . 3 2.3 References . 4 3 Algorithm Description 5 3.1 References . 5 4 Algorithm Inputs 7 4.1 Background Climatology Look Up Tables . 7 4.2 Local Angle Adjustment Coefficients . 8 4.3 Forecast Surface Pressure . 8 4.4 Surface Emissivity First Guess . 8 4.5 Microwave and Infrared Tuning Coefficients . 8 4.6 The Radiative Transfer Model . 10 4.6.1 Radiative Transfer Model of the Atmosphere in the Microwave . 11 4.6.2 Radiative Transfer Model of the Atmosphere in the Infrared . 16 4.7 References . 24 5 Description of the Core Retrieval Algorithm Step I: Microwave Retrieval Algorithm 26 5.1 Introduction . 26 5.2 Precipitation Flags, Rate Retrieval and ATMS Corrections . 26 5.2.1 Precipitation Flags . 26 5.2.2 Perturbation Corrections . 27 5.2.3 Rain Rate Retrieval Algorithm . 27 5.3 Profile Retrieval Algorithm . 29 5.3.1 Preliminary Surface Type Classification . 29 5.3.2 Atmospheric Moisture and Condensation Model . 29 5.3.3 Estimation of surface brightness and atmospheric moisture . 30 5.3.4 iteration procedure and convergence tests . -

Annual Report of the Academic Year 2017-18 Sr
ANNUAL REPORT OF THE ACADEMIC YEAR 2017-18 SR. PAGE EVENT NAME NO. NO. 1. About DJSCE IETE 1 2. DJ SPARK 2017 2 3. Student Committee 6 4. IETE Fortnight 7 4.1 MATLAB Workshop 8 4.2 Arduino Workshop 9 4.3 Lecture on Power Electronics 10 4.4 Seminar on How To Write A Technical Paper 11 4.5 Seminar on How To Write A Resume 12 4.6 Ethical Hacking Workshop 13 4.7 PCB Designing Workshop 14 5. Artificial Intelligence and Computer Vision 15 Workshop 6. Lecture on Smith Charts 16 7. Technical Talk on Audio and Speech Processing 17 8. Technical Talk on Artificial Intelligence and 18 Network Securities 9. Industrial Visit to GMRT 19 10. DJ Strike 2017-18 20 11. ICWiCOM 2017 23 12. CANSAT 25 13. Website Launch 26 14. Blogs 27 15. Book Bank 28 16. Component Bank 29 17. DJ IGNITE 30 18. Interview Section 31 19. DJ SPARK 2018 32 ABOUT DJSCE IETE IETE (Institution of Electronics and Telecommunication Engineers) is a professional society for the advancement of scientific and technologically bent minds in the field of Electronics and Telecommunication. IETE consists of two streams of student base. First wing is the students of alma-mater, IETE, viz. the pass outs of DIPIETE, AMIETE and ALCCS students which forms an Alumni Association. The second wing is the Engineering students studying in Engineering Colleges and Polytechnics across the Country. This wing is the IETE-SF (IETE Students Forum). The IETE Student’s Forum of D.J. Sanghvi College of Engineering was founded in 2005. -
Pushing Boundaries Through Innovative Design and Technology
10–12 JULY 2017 ATLANTA, GA Pushing Boundaries Through Innovative Design and Technology propulsionenergy.aiaa.org #aiaaPropEnergy 17-1835 The engine of change will come from the company that can build it. GE is bringing together best-in-class analytics and deep domain expertise to help our customers solve their toughest challenges. See how we’re changing the way we y at geaviation.com. 85064_GEAV_DI_Print Ad_P+E.indd 1 7/5/16 3:55 PM Contents Organizing Committee 4 Welcome 5 Sponsors 6 Forum Schedule 7 On-Site Wi Fi Information Pre-Forum Activities 9 Network Name: AIAA Password: PE2017 Plenary Sessions 10 Forum 360 Sessions 11 Conferences i/o: aiaa1.cnf.io Complex Aerospace Systems Exchange 13 www.twitter.com/aiaa Aircraft Electric Propulsion & Power Focus Area 14 www.facebook.com/AIAAfan ITAR Restricted Sessions 16 www.youtube.com/AIAATV Technical Sessions at a Glance 17 www.linkedin.com/companies/aiaa Program Detail 22 www.flickr.com/aiaaevents Rising Leaders in Aerospace 59 www.instagram.com/aiaaerospace Recognition and Lectures 60 livestream.com/AIAAvideo/PropEnergy2017 Networking Events 62 Exposition 63 Photography or the video or audio recording Exhibitors 65 of sessions or exhibits, as well as the unauthorized sale of AIAA-copyrighted General Information 70 material, is prohibited. Author and Session Chair Information 72 Committee Meetings 73 www.aiaa.org Author and Session Chair Index 74 propulsionenergy.aiaa.org Venue Map Back Cover propulsionenergy.aiaa.org 3 #aiaaPropEnergy IntroOrganizing Committee Organizing Committee Energy Storage Technologies Solid Rockets Joe Troutman, ABSL Space Products Barbara Leary, Johns Hopkins University Forum General Chair Applied Physics Laboratory Mike J. -

The Microwave Radiometer Technology Acceleration Cubesat
The Microwave Radiometer Technology Acceleration CubeSat (MiRaTA) Kerri Cahoy, J.M. Byrne, T. Cordeiro, P. Davé, Z. Decker, A. Kennedy, R. Kingsbury, A. Marinan, W. Marlow, T. Nguyen, S. Shea MIT STAR Laboratory William J. Blackwell, G. Allen, C. Galbraith, V. Leslie, I. Osaretin, M. DiLiberto, P. Klein, M. Shields, E. Thompson, D. Toher, D. Freeman, J. Meyer, R. Little MIT Lincoln Laboratory Neal Erickson, UMass-Amherst Radio Astronomy Rebecca Bishop, The Aerospace Corporation Space Telecommunications, Astronomy, and Radiation Lab This work is sponsored by the National Oceanic and Atmospheric Administration under Air Force Contract FA8721-05-C-0002. Opinions, interpretations, conclusions, and recommendations are those of the authors and are not necessarily endorsed by the United States Government. Outline • Introduction and Motivation • MiRaTA Goals – Microwave Radiometer – GPS Radio Occultation • MiRaTA Status – MicroMAS lessons learned – MiRaTA status • Next Steps MicroMAS Launched July 13, 2014 Orb-2 Antares/Cygnus Deployed March 4, 2015 International Space Station Courtesy NASA/NanoRacks ESTF 2015- 2 KC, WJB 6/15/2015 New Approach for Microwave Sounding Microsized Microwave Suomi NPP Satellite Atmospheric Satellite Launched Oct. 2011 (MicroMAS) Deployed Mar. 2015 Advanced Technology Microwave Sounder 4.2 kg, 10W, 34 x 10 x 10 cm (ATMS) • Miniaturized microwave sensor aperture (10 cm) • Broad footprints (~50 km), modest pointing requirements • Relatively low data rate (kbps) NASA/GSFC 85 kg, 130 W 2200 kg spacecraft • Perfect fit -

Electronic Warfare
Joint Publication 3-13.1 Electronic Warfare 25 January 2007 PREFACE 1. Scope This publication provides joint doctrine for electronic warfare planning, preparation, execution, and assessment in support of joint operations across the range of military operations. 2. Purpose This publication has been prepared under the direction of the Chairman of the Joint Chiefs of Staff (CJCS). It sets forth joint doctrine to govern the activities and performance of the Armed Forces of the United States in operations and provides the doctrinal basis for interagency coordination and for US military involvement in multinational operations. It provides military guidance for the exercise of authority by combatant commanders and other joint force commanders (JFCs) and prescribes joint doctrine for operations and training. It provides military guidance for use by the Armed Forces in preparing their appropriate plans. It is not the intent of this publication to restrict the authority of the JFC from organizing the force and executing the mission in a manner the JFC deems most appropriate to ensure unity of effort in the accomplishment of the overall objective. 3. Application a. Joint doctrine established in this publication applies to the commanders of combatant commands, subunified commands, joint task forces, subordinate components of these commands, and the Services. b. The guidance in this publication is authoritative; as such, this doctrine will be followed except when, in the judgment of the commander, exceptional circumstances dictate otherwise. If conflicts arise between the contents of this publication and the contents of Service publications, this publication will take precedence unless the CJCS, normally in coordination with the other members of the Joint Chiefs of Staff, has provided more current and specific guidance. -
A Systems-Engineering Assessment of Multiple Cubesat Build Approaches by Zachary Scott Decker
A Systems-Engineering Assessment of Multiple CubeSat Build Approaches by Zachary Scott Decker B.S. Astronautical Engineering United States Air Force Academy (2014) Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 2016 © 2016 Massachusetts Institute of Technology. All rights reserved. Author................................................................................................................................. Department of Aeronautics and Astronautics May 19, 2016 Certified by.......................................................................................................................... Kerri Cahoy Assistant Professor of Aeronautics and Astronautics Thesis Supervisor Accepted by........................................................................................................................ Paulo C. Lozano Associate Professor of Aeronautics and Astronautics Chair, Graduate Program Committee Disclaimer: The views expressed in this thesis are those of the author and do not reflect the official policy or position of the United States Air Force, the United States Department of Defense, or the United States Government. 2 A Systems-Engineering Assessment of Multiple CubeSat Build Approaches by Zachary Scott Decker Submitted to the Department of Aeronautics and Astronautics on May 19, 2016, in partial fulfillment of the requirements for the degree of -

Imagery Fundamentals
Chapter 3 Imagery Fundamentals Introduction Imagery is collected by remote sensing systems managed by either public or private organizations. It is characterized by a complex set of variables, including • collection characteristics: image spectral, radiometric, and spatial resolutions, view- ing angle, temporal resolution, and extent; and • organizational characteristics: image price and licensing and accessibility. The choice of which imagery to use in a project will be determined by matching the project’s requirements, budget, and schedule to the characteristics of available imagery. Making this choice requires understanding what factors influence image characteristics. This chapter provides the fundamentals of imagery by first introducing the components and features of remote sensing systems, and then showing how they combine to influence imag- ery collection characteristics. The chapter ends with a review of the organizational factors that also characterize imagery. The focus of this chapter is to provide an understanding of imagery that will allow the reader to 1) rigorously evaluate different types of imagery within the context of any geospatial application, and 2) derive the most value from the imagery chosen. ImageryGIS_Book.indb 27 8/17/17 1:48 PM Collection Characteristics Image collection characteristics are affected by the remote sensing system used to collect the imagery. Remote sensing systems comprise sensors that capture data about objects from a distance, and platforms that support and transport sensors. For example, humans are remote sensing systems because our bodies, which are platforms, support and trans- port our sensors—our eyes, ears, and noses—which detect visual, audio, and olfactory data about objects from a distance. Our brains then identify/classify this remotely sensed data into information about the objects.