Using Passive Elements and Control to Implement Single-To Three-Phase
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Phase Converter
Phase Converter Introduction A wide variety of commercial and industrial electrical equipment requires three-phase power. Electric utilities do not install three-phase power as a matter of course because it costs significantly more than single-phase installation. As an alternative to utility installed three-phase, rotary phase converters, static phase converters and phase converting variable frequency drives (VFD) have been used for decades to generate three-phase power from a single-phase source. A phase converter is a device that converts electric power provided as single phase to multiple phase or vice-versa. The majority of phase converters are used to produce three phase electric power from a single-phase source, thus allowing the operation of three-phase equipment at a site that only has single-phase electrical service. Phase converters are used where three-phase service is not available from the utility, or is too costly to install due to a remote location. A utility will generally charge a higher fee for a three-phase service because of the extra equipment for transformers and metering and the extra transmission wire. Rotary and Static Phase Converters Phase converters provide 3-phase power from a 1-phase source, and have been used for decades. The simplest type of old technology phase converter is generically called a static phase converter. This device typically consists of one or more capacitors and a relay to switch between the two capacitors once the motor has come up to speed. These units are comparatively inexpensive. They make use of the idea that a 3-phase motor can be started using a capacitor in series with the third terminal of the motor. -
How Phase Converters Help Apply Motors Pt1.Pub
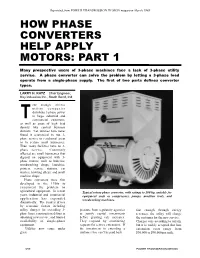
Reprinted from POWER TRANSMISSION DESIGN magazine March 1989 HOW PHASE CONVERTERS HELP APPLY MOTORS: PART 1 Many prospective users of 3-phase machines face a lack of 3-phase utility service. A phase converter can solve the problem by letting a 3-phase load operate from a single-phase supply. The first of two parts defines converter types. LARRY H. KATZ Chief Engineer, Kay Industries Inc., South Bend, Ind. rue enough, electric utility companies distribute 3-phase power to large industrial and T commercial customers, as well as areas of high load density like central business districts. Yet, utilities have never found it economical to run 3- phase service to residential areas or to certain small businesses. Thus, many facilities have no 3- phase service. Commonly affected are small businesses that depend on equipment with 3- phase motors, such as bakeries, woodworking shops, laundries, printers, service stations, car washes, bowling alleys, and small machine shops. Phase converters were first developed in the 1950s to circumvent the problem on agricultural equipment. In recent Typical rotary phase converter, with ratings to 100 hp, suitable for years, industrial and commercial equipment such as compressors, pumps, machine tools, and application has expanded woodworking machines. dramatically. The trend is driven by economic factors including utility charges for extending 3- pressure from regulatory agencies fast enough through energy phase lines, construction delays in to justify capital investments revenues, the utility will charge obtaining new service, and limited before granting rate increases. the customer for the new service. availability of single-phase They respond by scrutinizing Charges vary according to terrain, equipment. -
Electrician 3Rd Semester - Module 1 : DC Generator
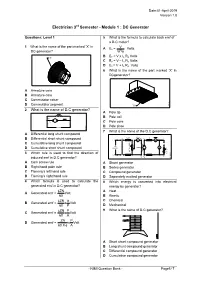
Electrician 3rd Semester - Module 1 : DC Generator Questions: Level 1 5 What is the formula to calculate back emf of a D.C motor? 1 What is the name of the part marked ‘X’ in V A Eb = Volts DC generator? IaRa B Eb = V x Ia Ra Volts C Eb = V – Ia Ra Volts D Eb = V + Ia Ra Volts 6 What is the name of the part marked ‘X’ in DCgenerator? A Armature core B Armature core C Commutator raiser D Commutator segment 2 What is the name of D.C generator? A Pole tip B Pole coil C Pole core D Pole shoe 7 What is the name of the D.C generator? A Differential long shunt compound B Differential short shunt compound C Cumulative long shunt compound D Cumulative short shunt compound 3 Which rule is used to find the direction of induced emf in D.C generator? A Cork screw rule A Shunt generator B Right hand palm rule B Series generator C Fleming’s left hand rule C Compound generator D Fleming’s right hand rule D Separately excited generator 4 Which formula is used to calculate the 8 Which energy is converted into electrical generated emf in D.C generator? energy by generator? φZN A Heat A Generated emf = Volt 60 B Kinetic φZN A C Chemical B Generated emf = x Volt 60 P D Mechanical φZN P 9 What is the name of D.C generator? C Generated emf = x Volt 60 A ZN P D Generated emf = x Volt 60 X φ A A Short shunt compound generator B Long shunt compound generator C Differential compound generator D Cumulative compound generator - NIMI Question Bank - Page1/ 7 10 What is the principle of D.C generator? 14 How many parallel paths in duplex lap A Cork screw rule winding -

7. (4-Fc- 1 by (24-4-2
No. 787,302, PATENTED APR, l905. M, C. A. LATOUR SINGLE PHASE DYNAMO ELECTRIC MACHINE, APPLICATION FILED AUG, 30, 1904, Witnesses. Inventor 3262.2%.-- a 322e. Marius C.A. Otour. 7. (4-f-c- 1 by (24-4-2------39tt'U. No. 787,302, Patented April 11, 1905. UNITED STATES PATENT OFFICE. MARIUS CHARLS ARTHUR LATOUR, OF PARIS, FRANCE, ASSIGNOR TO GENERAL ELECTRIC COMPANY., A CORFORATION OF NEW YORK. SNGLE-FHASE DYNAMOELECTRIC MACH NE. SPECIFICATION forming part of Letters Patent No. 787,302, dated April 11, 1905. Application filed August 30, 1904, Serial No. 222,683. To all, Luhon, it notif concern: in inductive relation to the armature to act as Be it known that I, MARIUS CHARLS AR damping-windings for damping out the fluc THUR LATOUR, a citizen of France, residing at tuations, and this arrangement has improved Paris, Department of Seine, France, have in the operation of the machines. vented certain new and useful Improvements My invention consists in providing a novel in Single-Phase Dynamo-Electric Machines, form of field-winding and connections there of which the following is a specification. for, such that the field-winding itself may act 55 My invention relates to single-phase alter as a damping-winding. nating-current machines of the type having a More specifically considered, my invention IO field-magnet excited with direct current, and consists in providing the armature with a dis has particular reference to single-phase rotary tributed field-winding instead of the usual converters, though it is not limited to this par polar winding and short circuiting equipoten ticular application. -
Multiple Choice Practice Questions for ONLINE/OMR AITT-2020 2 Year
Multiple Choice Practice Questions for ONLINE/OMR AITT-2020 nd 2 Year Electrician Trade Theory DC machine (Generator & Motor) 1 What is the name of the part marked as ‘X’ in DC generator given below? A - Armature core B -Brush C- Commutator raiser D -Commutator segment 2 What is the name of D.C generator given below? A- Differential long shunt compound B- Differential short shunt compound C -Cumulative long shunt compound D -Cumulative short shunt compound 3 Which rule is used to find the direction of induced emf in D.C generator? A- Cork screw rule B -Right hand palm rule C -Fleming’s left-hand rule D -Fleming’s right hand rule 4 Which formula is used to calculate the generated emf in D.C generator? A –ZNPa/60ɸ B -ɸZna/60P C - ɸZnp/60a D - ɸZnp/60 5 What is the formula to calculate back emf of a D.C motor? A -Eb = V/Ia Ra B- Eb = V x Ia Ra C -Eb = V – Ia Ra D -Eb = V + Ia Ra 6 What is the name of the part marked ‘X’ in DC generator given below? A -Pole tip B -Pole coil C -Pole core D -Pole shoe 7 What is the name of the D.C generator given below? A -Shunt generator B -Series generator C- Compound generator D -Separately excited generator 8 Which energy is converted into electrical energy by generator? A -Heat B- Kinetic C -Chemical D -Mechanical 9 What is the name of D.C generator field given below? A -Short shunt compound generator B -Long shunt compound generator C -Differential compound generator D -Cumulative compound generator 10 What is the principle of D.C generator? A -Cork screw rule B -Fleming’s left-hand rule C -Fleming’s -

Spokane Ag Expo!
Western Farm, Ranch & Dairy Magazine The vital resource of the Ag Industry Washington • winter/spring edition 2003-2004 Spokane Ag Expo! Nick’s Custom Boots Now That’s Value! Stressed? Tips For Managing Farm Stress To Stay Safe Merricks Bringing together experience, research, performance and commitment Western Farm, Ranch & Dairy Magazine a division of Ritz Family Publishing, Inc. 714 N. Main Street, Meridian, ID 83642 (208) 955-0124 • Toll Free:1(800) 330-3482 E-mail: [email protected] Website: www.ritzfamilypublishing.com 2 • Washington www.ritzfamilypublishing.com advertisers index Western Farm, Ranch & Dairy Magazine a Ritz Family Publication ADVERTISER PAGE President / CEO 395 Tractor & Implement ............................................................................ 23 Michael Ritz A-1 Scale .................................................................................................... 30 Ag Engineering & Development Co. ............................................................ 9 Editor / V.P. Agricultural Engineering Associates .......................................................... 30 Technical Operations Air Flow Systems Inc. ................................................................................. 24 Robert Davis American Steel Co. ..................................................................................... 30 B & W Custom Truck Beds Inc. .................................................................. 28 Account Executive / Born Again Computers ............................................................................... -

Testing a Rotary Converter
TUES IS P Testing a Rotary Converter Submitted to the Faculty of the OREGOi AGRICULTURAL COLLEGE for the decree of BACHELOR OF SCIEITCE In ELECTRICAL EITGIITEERIJTG by Julius Gordon Wallace Going June 1, 1910 APPROVE1.. Redacted for privacy - - -se-fl n- - as 4,. .c n a a s _- - - f.rteflt of Electrical ErÀginoerir.g. Redacted for privacy - - Lcaì; School ninoeriLg. ROTARY COI7EiTii. The ROTARY COLVEiTER or 1'ouilo Current Gexierator Is a machine for convert1g alterLatinC currcr1t to dir- oct current, or vice vora. The thrortarce that such machines have iow asu.rne in the e1octric1 industry is clue to severci CUiSeS; (a) It is tecocsary, for ccorornic roisons, to use alter- r.atin currett at high voltacs lt 1otg-distaice trans- mission. Therefore, rotar; converters are re.ired for char..ing the alterr4eting currert into direct current for use IL olectrie railway motors, wi:lch riuRt be supjüied with direct current from the trolley wire at po1rts at a a1starce from the 1;ower house. (b) :otary converters are needed for charging storage batteries in plces where the cer.tru1 statioL supiios, elternating current and inverted rotaries are necessary for factory driving vith alternating current r'iotors in caces where direct current ordy Ic supplied by contrai etat Ions. (o) Direct current is r.ecesear In many chemical and. eloctrometallurgical thduutrles euch as electrolytic re- duction of alumlnwn froT It oree, electrolytic refining of copper, etc. If alternating current Is generated and transmitted to these octablishments It must be converted into direct current before It can te utilized. -
Low Cost Grid Electrification Technologies a Handbook for Electrification Practitioners
Low Cost Grid Electrification Technologies A Handbook for Electrification Practitioners Low Cost Grid Electrification Technologies A Handbook for Electrification Practitioners About this handbook Place and date of publication This handbook is a joint product by the EU Energy Initiative Eschborn, 2015 Partnership Dialogue Facility (EUEI PDF) and the World Bank’s Africa Electrification Initiative (AEI). It has been developed Lead author in association with two workshops conducted in Arusha, Chrisantha Ratnayake (Consultant) Tanzania (September 2013) and Cotonou, Benin (March 2014) to disseminate knowledge on low cost grid electrification Editor technologies for rural areas*. The workshops were conducted Niklas Hayek (EUEI PDF) in cooperation with the Rural Energy Agency Tanzania, Société Béninoise d’Energie Electrique (SBEE), Agence béninoise Contributors d’électricité rurale et de maitrise d’énergie (ABERME), and Prof. Francesco Iliceto (University of Rome), the Club of African agencies and structures in charge of rural Jim Van Coevering (NRECA) electrification (Club-ER). Reviewers Published by Bernhard Herzog (GIZ), Conrad Holland (SMEC), European Union Energy Initiative Ralph Karhammar (Consultant), Bozhil Kondev (GIZ), Partnership Dialogue Facility (EUEI PDF) Bruce McLaren (ESKOM), Ina de Visser (EUEI PDF), Club-ER c/o Deutsche Gesellschaft für Internationale Zusammenarbeit (GIZ) Design P.O. Box 5180, 65726 Eschborn, Germany Schumacher. Visuelle Kommunikation [email protected] · www.euei-pdf.org www.schumacher-visuell.de The Partnership Dialogue Facility (EUEI PDF) is an instrument Photos of the EU Energy Initiative (EUEI). It is funded by the © EUEI PDF (cover, pp. 6, 15, 30, 75, 77, 90, 108, 118) European Commission, Austria, Finland, France, Germany, © GIZ (pp. 13, 16, 20 right, 50, 60, 73, 84, 87) The Netherlands, and Sweden. -

Commissioning a 400 Hz Rotary Inverter
Commissioning a 400 Hz Rotary Inverter Wayne Anthony Smith A dissertation submitted to the Department of Electrical Engineering, University of Cape Town, in fulfilment of the requirements for the degree of Master of Science in Engineering. Cape Town, January 2009 Declaration I know the meaning of plagiarism and declare that all the work in the document, save for that which is properly acknowledged, is my own. SignatureofAuthor.................................. ............................ 11 January 2009 i Abstract This dissertation covers the commissioning and testing of an aircraft’s constant frequency alternator as the power supply for the Blue Parrot radar. The Blue Parrot is an X-band radar which forms part of the navigation and weapon-aiming system onboard the Buccaneer S-50 SAAF aircraft. The radar set uses a source of three-phase power at 400 Hz, which the constant frequency alternator can supply with the aid of certain auxiliary systems. The auxiliary systems include a prime mover, blower fan and a telemetering system. The prime mover has high starting currents which were reduced significantly by the use of a soft-starter. During testing, the constant frequency alternator started overheating and a blower fan was selected based on its thermal requirements. Significant cooling of the constant frequency alternator’s case temperature was achieved by the use of a blower fan and shroud. The generator control unit monitors and regulates all parameters on the unit except for case temperature and blower fan pressure. A telemetering system was designed and built to monitor and display these parameters. ii Acknowledgements Thank you LORD a second time. I would also like to express my appreciation to those who helped me achieve this mile- stone. -

Written Pole Motors
PDHonline Course E299 (3 PDH) Written Pole Motors Instructor: Lee Layton, PE 2012 PDH Online | PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.PDHonline.org www.PDHcenter.com An Approved Continuing Education Provider www.PDHcenter.com PDH Course E299 www.PDHonline.org Written Pole® Motors Lee Layton, P.E Table of Contents Section Page Introduction ………………………………………… 3 I. Basic Operation of Electric Motors ……………… 5 II. Written Pole Motor Design ……………………… 20 III. Operational Benefits of Written-Pole® Motors …. 26 Summary ..…………………………………………. 30 The term Written-Pole® motor is trademarked by Precise Power Corporation of Bradenton, Fl. All references in this course to Written-Pole motors refer to the trademarked name registered to Precise Power Corporation. © Lee Layton. Page 2 of 30 www.PDHcenter.com PDH Course E299 www.PDHonline.org Introduction In the 1990’s, with support from the Electric Power Research Institute (EPRI), the Precise Power Corporation of Bradenton, Florida, developed a new concept in electric motors called the Written Pole® electric motor. This new motor type dramatically reduces starting currents of single phase motors and allows the design of single phase motors up to 100 hp as compared to conventional single phase motors, which are generally limited to units of 15 hp and smaller. Electric motors are the backbone of an electrified society and electric motors are responsible for two-thirds of all electric energy generated in the United States today. Most electric motors are small and only 2% of the motors in the United States are over 5 hp, but they account for over 70% of the energy used to drive electric motors. -

Single-Phase to Three-Phase Drive System Composed of Two Parallel Single-Phase Rectifiers
ISSN (Online): 2349-7084 GLOBAL IMPACT FACTOR 0.238 ISRA JIF 0.351 INTERNATIONAL JOURNAL OF COMPUTER ENGINEERING IN RESEARCH TRENDS VOLUME 1, ISSUE 6, DECEMBER 2014, PP 552-558 Single-Phase To Three-Phase Drive System Composed of Two Parallel Single-Phase Rectifiers 1 G. ANIL KUMAR 2 G. RAVI KUMAR 1M.Tech Research Scholar, Priyadarshini Institute of Technology & Management 2Associate Professor, Priyadarshini Institute of Technology & Management Abstract: This paper proposes a single-phase to three-phase drive system composed of two parallel single-phase rectifiers, a three-phase inverter, and an induction motor. The proposed topology permits to reduce the rectifier switch currents, the harmonic distortion at the input converter side, and presents improvements on the fault tolerance characteristics. Even with the increase in the number of switches, the total energy loss of the proposed system may be lower than that of a conventional one. The model of the system is derived, and it is shown that the reduction of circulating current is an important objective in the system design. A suitable control strategy, including the pulse width modulation technique (PWM), is developed. Experimental results are presented as well. Index Terms: AC-DC-AC power converter, drive system, parallel Converter, Fault Identification System (FIS). —————————— —————————— I. INTRODUCTION a three-phase inverter is proposed. The proposed system is conceived to operate where the single- Several solutions have been proposed when the phase utility grid is the unique option available. objective is to supply a three-phase motor from Compared to the conventional topology, the single-phase ac mains [1]-[4]. -
Page 1 of 7 Single-Phase Power for Motor-Generator 10Ees 10/10/2017
Single-phase Power for Motor-Generator 10EEs Page 1 of 7 Thread: Single-phase Power for Motor-Generator 10EEs Thread Tools Search Thread Display 03-02-2008, 08:13 PM #1 Join Date: Dec 2002 Location: Monterey Bay, Diamond California Posts: 10,260 Post Thanks / Like Likes (Given): 27 Likes (Received): 191 It is well-known that WiaD and Modular 10EEs may be powered by single-phase. Herein I present a modification to Motor-Generator 10EEs which will allow these machines to be powered by single-phase. Both a 230 volt and a 460 volt modification are presented. The underlying technology is adapted from Henry Steelman's U.S. Patent 2,922,942 (which see), and is extended by me to incorporate power factor correction (not claimed by Steelman in his patent) and easy adaptation to the 10EE's AC Section. (An essential feature, and requirement of Steelman's idea is a twelve-wire three-phase motor, or a nine-wire motor which has been modified to add the three "missing" wires implicit in that motor's "star point", may be very easily powered by single phase, provided a starting circuit is provided and the motor winding components are wired in an innovative way. This innovation simulates a capacitor start/capacitor run single-phase motor. I have added power factor correction, which Steelman did not claim, and which further improves upon Steelman's idea). The first Figure describes in the abstract how a three-phase motor may be powered by single-phase without sacrificing motor power. This is more-or-less directly from Steelman's patent, extended by information included in Steelman Industries, Inc's modification to that patent for 460 volt applications.