Commissioning a 400 Hz Rotary Inverter
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Improvement of Electromagnetic Railgun Barrel Performance and Lifetime By
IMPROVEMENT OF ELECTROMAGNETIC RAILGUN BARREL PERFORMANCE AND LIFETIME BY METHOD OF INTERFACES AND AUGMENTED PROJECTILES A Thesis Presented to the Faculty of California Polytechnic State University San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Aerospace Engineering by Aleksey Pavlov June 2013 c 2013 Aleksey Pavlov ALL RIGHTS RESERVED ii COMMITTEE MEMBERSHIP TITLE: Improvement of Electromagnetic Rail- gun Barrel Performance and Lifetime by Method of Interfaces and Augmented Pro- jectiles AUTHOR: Aleksey Pavlov DATE SUBMITTED: June 2013 COMMITTEE CHAIR: Kira Abercromby, Ph.D., Associate Professor, Aerospace Engineering COMMITTEE MEMBER: Eric Mehiel, Ph.D., Associate Professor, Aerospace Engineering COMMITTEE MEMBER: Vladimir Prodanov, Ph.D., Assistant Professor, Electrical Engineering COMMITTEE MEMBER: Thomas Guttierez, Ph.D., Associate Professor, Physics iii Abstract Improvement of Electromagnetic Railgun Barrel Performance and Lifetime by Method of Interfaces and Augmented Projectiles Aleksey Pavlov Several methods of increasing railgun barrel performance and lifetime are investigated. These include two different barrel-projectile interface coatings: a solid graphite coating and a liquid eutectic indium-gallium alloy coating. These coatings are characterized and their usability in a railgun application is evaluated. A new type of projectile, in which the electrical conductivity varies as a function of position in order to condition current flow, is proposed and simulated with FEA software. The graphite coating was found to measurably reduce the forces of friction inside the bore but was so thin that it did not improve contact. The added contact resistance of the graphite was measured and gauged to not be problematic on larger scale railguns. The liquid metal was found to greatly improve contact and not introduce extra resistance but its hazardous nature and tremendous cost detracted from its usability. -

Soft Starting of Three Phase Induction Motor
© 2017 IJRTI | Volume 2, Issue 5 | ISSN: 2456-3315 SOFT STARTING OF THREE PHASE INDUCTION MOTOR 1Mr. Satpute Akshaykumar, 2Mr. Tambe Sagar, 3Mr. Shinde Vijay, 4Prof. Mone P.P. Department of Electrical Engineering SVPM’s College of Engineering Malegaon (Bk), Tal-Baramati, Dist-Pune, Savitribai Phule Pune University. Abstract— This paper, present a soft starting of induction motor. At the time of starting three phase induction motor takes very large current and have low power factor. Due to high current, motor torque content ripples and transients. Due to transients and torque pulsation shaft of motor experiences jerk hence mechanical life of rotor reduces. In order to mitigate this adverse effect if starting current and torque pulsation in induction motor, a popular method is used which is electronically controlled soft starting of induction motor. Normally soft starters are used for avoiding this problems and soft start is achieved by increasing stator frequency. By using soft starter performance of induction motor is improved and also improved load torque characteristics. Keywords— Three phase induction motor, microcontroller, and PWM inverter. I. INTRODUCTION The ac motor starters employing power semiconductors are being increasingly used to replace electromagnetic line starters and conventional reduced-voltage starters because of their controlled soft-starting capability with limited starting current. Thyristor-based soft starters are cheap, simple, reliable, and occupy less volume, and therefore, their use is a viable solution to the induction motor (IM) starting problem. Depending on the initial switching instants of all the three phases to the supply, an IM may produce severe pulsations on the electromechanical torque, regardless of whether it is controlled by a direct-online starter or a soft starter . -

Soft Starter User Manual Safety Clauses 1
Soft Starter User Manual Safety Clauses 1. The general of FWI-SS Series Soft Starter 1.1 The main function 1.2 The main characteristics 2. Code explanation and Check-up before using 3. Usage conditions and Installation directions 3.1 The Usage condition 3.2 The Installation requirement 3.3 The Installation Directions 4. Connection and External terminal 4.1 The diagram connection 4.2 The external terminal 4.3 The diagram of Main circuit connection 4.4 The communication interface 5. Control panel and its operation 5.1 The operation of control panel 5.2 Parameter set and explanation 5.3 The functions of "Programmable relay output" 5.4 The function of Automatic Re-start 5.5 Directions for other set items 5.6 Help message and explanation 6. Protection Functions and directions 6.1 Protection functions and theirs parameter 6.2 Protection classes and explanation 7. Test run and application 7.1 Set up electricity to test run 7.2 Starting modes and application 7.3 Stopping modes and application 7.4 Application example 1 www.vtdrive.com Safety Clauses In the process of using the soft starter, please note the following Safety Clauses Please check this user manual carefully before using the product. Only the technical person is allowed to install the product. To be sure that the motor is correctly matched with the soft starter. It is forbid to connect capacitors to the output terminals (U V W). Please seal the terminal switch insulation glue after finishing connect them. The soft starter and its enclosures must be fixedly earthed. -

VEIKONG S6000 Soft Starter and Panel User Manual
User Manual Online Running Soft Starter Safety Clauses Safety Clauses Thanks for your using intelligent motor online soft starter, this product is used for three-phase squirrel cage induction motor soft starting and soft stopping control. Before using, please carefully read and understand the contents of this manual. In the process of using the soft starter, please note the following Safety Clauses: Please check this user manual carefully before using the product. Only the technical person is allowed to install the product. To be sure that the motor is correctly matched with the soft starter. It is forbid to connect capacitors to the output terminals (U V W). Please seal the terminal switch insulation glue after finishing connect them. The soft starter and its enclosures must be fixedly earthed. During the maintenance and repair, the input must be off-power. This user manual content may be changed due to technical reasons or modified. We reserve the updating right. I Table of Contents Table of Contents 1. Online Running Soft Starter .................................................................................................................................. 1 1.1 Online running soft starter profile ................................................................................................................... 1 1.2 The main feature of online running soft starter ............................................................................................... 1 1.3 The main function ........................................................................................................................................... -

Brushless DC Electric Motor
Please read: A personal appeal from Wikipedia author Dr. Sengai Podhuvan We now accept ₹ (INR) Brushless DC electric motor From Wikipedia, the free encyclopedia Jump to: navigation, search A microprocessor-controlled BLDC motor powering a micro remote-controlled airplane. This external rotor motor weighs 5 grams, consumes approximately 11 watts (15 millihorsepower) and produces thrust of more than twice the weight of the plane. Contents [hide] 1 Brushless versus Brushed motor 2 Controller implementations 3 Variations in construction 4 AC and DC power supplies 5 KM rating 6 Kv rating 7 Applications o 7.1 Transport o 7.2 Heating and ventilation o 7.3 Industrial Engineering . 7.3.1 Motion Control Systems . 7.3.2 Positioning and Actuation Systems o 7.4 Stepper motor o 7.5 Model engineering 8 See also 9 References 10 External links Brushless DC motors (BLDC motors, BL motors) also known as electronically commutated motors (ECMs, EC motors) are electric motors powered by direct-current (DC) electricity and having electronic commutation systems, rather than mechanical commutators and brushes. The current-to-torque and frequency-to-speed relationships of BLDC motors are linear. BLDC motors may be described as stepper motors, with fixed permanent magnets and possibly more poles on the rotor than the stator, or reluctance motors. The latter may be without permanent magnets, just poles that are induced on the rotor then pulled into alignment by timed stator windings. However, the term stepper motor tends to be used for motors that are designed specifically to be operated in a mode where they are frequently stopped with the rotor in a defined angular position; this page describes more general BLDC motor principles, though there is overlap. -
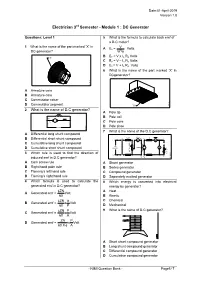
Electrician 3Rd Semester - Module 1 : DC Generator
Electrician 3rd Semester - Module 1 : DC Generator Questions: Level 1 5 What is the formula to calculate back emf of a D.C motor? 1 What is the name of the part marked ‘X’ in V A Eb = Volts DC generator? IaRa B Eb = V x Ia Ra Volts C Eb = V – Ia Ra Volts D Eb = V + Ia Ra Volts 6 What is the name of the part marked ‘X’ in DCgenerator? A Armature core B Armature core C Commutator raiser D Commutator segment 2 What is the name of D.C generator? A Pole tip B Pole coil C Pole core D Pole shoe 7 What is the name of the D.C generator? A Differential long shunt compound B Differential short shunt compound C Cumulative long shunt compound D Cumulative short shunt compound 3 Which rule is used to find the direction of induced emf in D.C generator? A Cork screw rule A Shunt generator B Right hand palm rule B Series generator C Fleming’s left hand rule C Compound generator D Fleming’s right hand rule D Separately excited generator 4 Which formula is used to calculate the 8 Which energy is converted into electrical generated emf in D.C generator? energy by generator? φZN A Heat A Generated emf = Volt 60 B Kinetic φZN A C Chemical B Generated emf = x Volt 60 P D Mechanical φZN P 9 What is the name of D.C generator? C Generated emf = x Volt 60 A ZN P D Generated emf = x Volt 60 X φ A A Short shunt compound generator B Long shunt compound generator C Differential compound generator D Cumulative compound generator - NIMI Question Bank - Page1/ 7 10 What is the principle of D.C generator? 14 How many parallel paths in duplex lap A Cork screw rule winding -

7. (4-Fc- 1 by (24-4-2
No. 787,302, PATENTED APR, l905. M, C. A. LATOUR SINGLE PHASE DYNAMO ELECTRIC MACHINE, APPLICATION FILED AUG, 30, 1904, Witnesses. Inventor 3262.2%.-- a 322e. Marius C.A. Otour. 7. (4-f-c- 1 by (24-4-2------39tt'U. No. 787,302, Patented April 11, 1905. UNITED STATES PATENT OFFICE. MARIUS CHARLS ARTHUR LATOUR, OF PARIS, FRANCE, ASSIGNOR TO GENERAL ELECTRIC COMPANY., A CORFORATION OF NEW YORK. SNGLE-FHASE DYNAMOELECTRIC MACH NE. SPECIFICATION forming part of Letters Patent No. 787,302, dated April 11, 1905. Application filed August 30, 1904, Serial No. 222,683. To all, Luhon, it notif concern: in inductive relation to the armature to act as Be it known that I, MARIUS CHARLS AR damping-windings for damping out the fluc THUR LATOUR, a citizen of France, residing at tuations, and this arrangement has improved Paris, Department of Seine, France, have in the operation of the machines. vented certain new and useful Improvements My invention consists in providing a novel in Single-Phase Dynamo-Electric Machines, form of field-winding and connections there of which the following is a specification. for, such that the field-winding itself may act 55 My invention relates to single-phase alter as a damping-winding. nating-current machines of the type having a More specifically considered, my invention IO field-magnet excited with direct current, and consists in providing the armature with a dis has particular reference to single-phase rotary tributed field-winding instead of the usual converters, though it is not limited to this par polar winding and short circuiting equipoten ticular application. -

Using Passive Elements and Control to Implement Single-To Three-Phase
LINEAR LIBRARY C01 0072 5350 1111111111111111 University of Cape Town Electrical Engineering Dept Power Electronics Group ' Using Passive Elements and Control to Implement Single- to Three-Phase Conversion University of Cape Town Prepared by: Stuart Marinus University of Cape Town South Africa Prepared for: Mr. M. Malengret Department of Electrical Engineering University of Cape Town Due Date: 30 Septem her 1999 Acknowledgments I wish to thank the following people for their invaluable contribution towards this project: Mr M. Malengret, my thesis supervisor, for helping me a great deal with the initial formulation of ideas and making it possible for me to complete my Master of Science Degree at the University of Cape Town. My parents, Shirley and Andy, for sacrificing so much for me. Their unconditional love and belief in me has made it possible for me to get this far. Caroline, for her support, understanding and thoughtfulness. Dan Archer, who gave up much of his time, knowledge and experience on a daily basis, especially in the design of the saturable-core reactors and switch-mode power supplies. Clive Granville for his advice and excellent technical assistance. The research group: Huey, Dave, Elvis, Dan, Sven and Kurt, and staff and students of the Power Machines Laboratory- Chris, Clive, Brian, Colin and Phineas who were always ready and willing to help when needed and who made my time spent at UCT very enjoyable. II Terms of Reference This thesis was commissioned and supervised by Mr Malengret of the Electrical Engineering Department at the University of Cape Town in partial fulfilment of the requirements for a MSc Degree in Electrical Engineering. -

Industrial Smart Starters
PRODUCT CATALOG INDUSTRIAL SMART STARTERS franklin-controls.com SAFETY FIRST! As with all electrical equipment, only qualified, expert personnel should perform maintenance and installation. Comply with all applicable local and national codes and laws that regulate the installation and operation of equipment and read manuals thoroughly. Use only installation manuals and not this sales brochure for installation procedures. It is up to the installer to determine product suitability for a given application. © 2020 Franklin Electric Co., Inc. Product improvement is a continual process. Pricing and specifications subject to change without notice. Marketing materials should not be relied upon for technical specification. Cerus, Mira, Orion, Titan, Franklin Electric and associated logos are trademarks of Franklin Electric Co., Inc. All sales subject to Franklin Electric Terms and Conditions. INDUSTRIAL SMART STARTERS CATALOG ISS with SmartStart™ ........................................................................................................... 4 Ordering & Sizing Information ...................................................................................................................................................................................5 Specifications ..............................................................................................................................................................................................................6 Wiring Diagram ...........................................................................................................................................................................................................7 -

Current-Limiting Soft Starting Method for a High-Voltage and High-Power Motor
energies Article Current-Limiting Soft Starting Method for a High-Voltage and High-Power Motor Yifei Wang 1,2, Kaiyang Yin 1,*, Youxin Yuan 1 and Jing Chen 1 1 School of Automation, Wuhan University of Technology, Wuhan 430070, China 2 Department of Civil and Environmental Engineering, University of Wisconsin-Madison, Madison, WI 53706, USA * Correspondence: [email protected] Received: 17 July 2019; Accepted: 8 August 2019; Published: 9 August 2019 Abstract: Focusing on the starting problems of a high-voltage and high-power motor, such as large starting current, low power factor, waste of resources, and lack of harmonic control, this paper proposes a current-limiting soft starting method for a high-voltage and high-power motor. The method integrates functions like autotransformer voltage reduction–current limiting starting, magnetron voltage regulation–current limiting starting, and reactive power compensation during starting, and then the power filtering subsystem is turned on to filter out harmonics in power system as the starting process terminates. According to the current-limiting starting characteristic curve, the topological structure of the integrated device is established and then the functional logic switching strategy is put forward. Afterwards, the mechanisms of current-limiting starting, reactive compensation and dynamic harmonic filtering are analyzed, and the simulation and experimental evaluation are completed. In particular, the direct starting and the current-limiting are performed by developing a simulation system. In addition, a 10 kV/19,000 kW fan-loaded motor of a steel plant is chosen as the subject to verify the performance of the current-limiting soft starting method. -
Multiple Choice Practice Questions for ONLINE/OMR AITT-2020 2 Year
Multiple Choice Practice Questions for ONLINE/OMR AITT-2020 nd 2 Year Electrician Trade Theory DC machine (Generator & Motor) 1 What is the name of the part marked as ‘X’ in DC generator given below? A - Armature core B -Brush C- Commutator raiser D -Commutator segment 2 What is the name of D.C generator given below? A- Differential long shunt compound B- Differential short shunt compound C -Cumulative long shunt compound D -Cumulative short shunt compound 3 Which rule is used to find the direction of induced emf in D.C generator? A- Cork screw rule B -Right hand palm rule C -Fleming’s left-hand rule D -Fleming’s right hand rule 4 Which formula is used to calculate the generated emf in D.C generator? A –ZNPa/60ɸ B -ɸZna/60P C - ɸZnp/60a D - ɸZnp/60 5 What is the formula to calculate back emf of a D.C motor? A -Eb = V/Ia Ra B- Eb = V x Ia Ra C -Eb = V – Ia Ra D -Eb = V + Ia Ra 6 What is the name of the part marked ‘X’ in DC generator given below? A -Pole tip B -Pole coil C -Pole core D -Pole shoe 7 What is the name of the D.C generator given below? A -Shunt generator B -Series generator C- Compound generator D -Separately excited generator 8 Which energy is converted into electrical energy by generator? A -Heat B- Kinetic C -Chemical D -Mechanical 9 What is the name of D.C generator field given below? A -Short shunt compound generator B -Long shunt compound generator C -Differential compound generator D -Cumulative compound generator 10 What is the principle of D.C generator? A -Cork screw rule B -Fleming’s left-hand rule C -Fleming’s -

Projectile 45
4%.* A FEASIBILITY STUDY OF A HYPERSONIC REAL-GAS FACILITY FINAL REPORT Submitted To: Grants Officer NASA Langley Research Center Office of Grants and University Affairs Hampton, VA 23665 Grant d NAG1-721 January 1, 1987 to May 31, 1987 Submitted by: J. H. Gully Co-principal Investigator M. D. Driga Co-principal Investigator W. F. Weldon Co-principal Investigator (NBSA-CR-180423) A FEASIBILITY STUDY OF A N88-10043 HYPEBSOUIC RBAL-SAS FACILITY Final Report (Texas tJniv.1 154 p Avail: NTIS AC A08/tlP A01 CSCL 14s Uacl as G3/09 0 103727 Center for Electromechanico The University of Texas at Austin Balcones Research Center EME 1.100, Building 133 Austin, TX 78758-4497 (512)471-4496 CONTENTS Page INTRODUCTION 1 Discu ssion 2 HIGH ENERGY LAUNCHER FOR BALLISTIC RANGE 5 Introduction 5 Launch Concepts and Theory 6 COAXIAL ACCELERATOR 9 Introduction 9 System Description 10 System Analysis 13 Main Parameters 13 Launcher Configurations 15 Electromechanical Considerations 17 Power Supplies 22 Electromagnetic Principles 25 STATOR WINDING DESIGN 31 Starter Coil (Secondary Current Initiation) 35 Power Supply Characteristics 41 Projectile 45 RAILGUN ACCELERATOR 50 Introduction 50 Background 50 Railgun Construction 53 Synchronous Switching of Energy Store 58 Initial Acceleration 58 Method for Decelerating Sabot 60 Power Source 60 Inductor Design 69 Railgun Performance 75 Sa bot De sign 75 Plasma Bearings 78 Armature Consideration 80 Maintenance 82 Model Design 82 INSTRUMENTATION 84 Electromagnetic Launch Model Electronics 84 Data Acquisition 85 Circuit