IMAGE, the First of the NEW MIDEX Missions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Abstract Observation Overview Nustar HXR Imaging Microflare
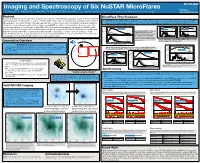
Imaging and Spectroscopy of Six NuSTAR MicroFlares SH11D-2898 Contact: J. Duncan1, L. Glesener1, I. Hannah2, D. Smith3, B. Grefenstette4 (1Univ, of Minnesota; 2Univ. of Glasgow; 3UC Santa Cruz; 4California Institute of Technology) [email protected] Abstract MicroFlare Time Evolution Hard X-ray (HXR) emission in solar flares originates from regions of high temperature plasma, as well as from non-thermal particle populations [1]. Both of these sources of HXR radiation make solar observation in this band important for study of • NuSTAR observed 6 MicroFlares during this observation. Time evolution is shown in both raw and normalized NuSTAR flare energetics. NuSTAR is the first HXR telescope with direct focusing optics, giving it a dramatic increase in sensitivity countsLivetime acrosscorrection several applied energy ranges for each flare. Counts are livetime-corrected (NuSTAR livetime ranged from 1-14%). Livetime correction applied over previous indirect imaging methods. Here we present NuSTAR observation of six microflares from one solar active Livetime correction applied 5 5 6 5×10 4×10 2.0 10 5 × 4×10 5 region during a period of several hours on May 29th, 2018. In conjunction with simultaneous data from SDO/AIA, data 3×10 5 2-4 keV 2-4 keV 6 3×10 1.5 10 Orbit1, Flare B 4-6 keV 2×105 4-6 keV × 5 counts 2 10 2-4 keV × Orbit1, Flare A 6-8 keV counts Orbit1, Flare C 6-8 keV from this observation has been used to create flare-time images showing the spatial extent of HXR emission. Additionally, 5 5 1 10 1×10 8-10 keV × 8-10 keV 6 4-6 keV 1.0×10 (Left) Estimated GOES A5 flare, with 0 0 1.2 1.2 16:07 16:08 16:09 16:10 16:11 16:46 16:48 16:50 16:52 16:54 NuSTAR lightcurves show time evolution in four different HXR energy ranges over the course of each flare. -

Build a Spacecraft Activity
UAMN Virtual Family Day: Amazing Earth Build a Spacecraft SMAP satellite. Image: NASA. Discover how scientists study Earth from above! Scientists use satellites and spacecraft to study the Earth from outer space. They take pictures of Earth's surface and measure cloud cover, sea levels, glacier movements, and more. Materials Needed: Paper, pencil, craft materials (small recycled boxes, cardboard pieces, paperclips, toothpicks, popsicle sticks, straws, cotton balls, yarn, etc. You can use whatever supplies you have!), fastening materials (glue, tape, rubber bands, string, etc.) Instructions: Step 1: Decide what you want your spacecraft to study. Will it take pictures of clouds? Track forest fires? Measure rainfall? Be creative! Step 2: Design your spacecraft. Draw a picture of what your spacecraft will look like. It will need these parts: Container: To hold everything together. Power Source: To create electricity; solar panels, batteries, etc. Scientific Instruments: This is the why you launched your satellite in the first place! Instruments could include cameras, particle collectors, or magnometers. Communication Device: To relay information back to Earth. Image: NASA SpacePlace. Orientation Finder: A sun or star tracker to show where the spacecraft is pointed. Step 3: Build your spacecraft! Use any craft materials you have available. Let your imagination go wild. Step 4: Your spacecraft will need to survive launching into orbit. Test your spacecraft by gently shaking or spinning it. How well did it hold together? Adjust your design and try again! Model spacecraft examples. Courtesy NASA SpacePlace. Activity adapted from NASA SpacePlace: spaceplace.nasa.gov/build-a-spacecraft/en/ UAMN Virtual Early Explorers: Amazing Earth Studying Earth From Above NASA is best known for exploring outer space, but it also conducts many missions to investigate Earth from above. -

Nustar and XMM-Newton Observations of the Hard X-Ray Spectrum of Centaurus A
Downloaded from orbit.dtu.dk on: Sep 27, 2021 NuSTAR and XMM-Newton Observations of the Hard X-Ray Spectrum of Centaurus A Fürst, F.; Müller, C.; Madsen, K. K.; Lanz, L.; Rivers, E.; Brightman, M.; Arevalo, P.; Balokovi, M.; Beuchert, T.; Boggs, S. E. Total number of authors: 31 Published in: The Astrophysical Journal Link to article, DOI: 10.3847/0004-637X/819/2/150 Publication date: 2016 Document Version Publisher's PDF, also known as Version of record Link back to DTU Orbit Citation (APA): Fürst, F., Müller, C., Madsen, K. K., Lanz, L., Rivers, E., Brightman, M., Arevalo, P., Balokovi, M., Beuchert, T., Boggs, S. E., Christensen, F. E., Craig, W. W., Dauser, T., Farrah, D., Graefe, C., Hailey, C. J., Harrison, F. A., Kadler, M., King, A., ... Zhang, W. W. (2016). NuSTAR and XMM-Newton Observations of the Hard X-Ray Spectrum of Centaurus A. The Astrophysical Journal, 819(2), [150]. https://doi.org/10.3847/0004- 637X/819/2/150 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Users may download and print one copy of any publication from the public portal for the purpose of private study or research. You may not further distribute the material or use it for any profit-making activity or commercial gain You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. -

Physics of the Cosmic Microwave Background Anisotropy∗
Physics of the cosmic microwave background anisotropy∗ Martin Bucher Laboratoire APC, Universit´eParis 7/CNRS B^atiment Condorcet, Case 7020 75205 Paris Cedex 13, France [email protected] and Astrophysics and Cosmology Research Unit School of Mathematics, Statistics and Computer Science University of KwaZulu-Natal Durban 4041, South Africa January 20, 2015 Abstract Observations of the cosmic microwave background (CMB), especially of its frequency spectrum and its anisotropies, both in temperature and in polarization, have played a key role in the development of modern cosmology and our understanding of the very early universe. We review the underlying physics of the CMB and how the primordial temperature and polarization anisotropies were imprinted. Possibilities for distinguish- ing competing cosmological models are emphasized. The current status of CMB ex- periments and experimental techniques with an emphasis toward future observations, particularly in polarization, is reviewed. The physics of foreground emissions, especially of polarized dust, is discussed in detail, since this area is likely to become crucial for measurements of the B modes of the CMB polarization at ever greater sensitivity. arXiv:1501.04288v1 [astro-ph.CO] 18 Jan 2015 1This article is to be published also in the book \One Hundred Years of General Relativity: From Genesis and Empirical Foundations to Gravitational Waves, Cosmology and Quantum Gravity," edited by Wei-Tou Ni (World Scientific, Singapore, 2015) as well as in Int. J. Mod. Phys. D (in press). -

GALEX: Galaxy Evolution Explorer
GALEX: Galaxy Evolution Explorer Barry F. Madore Carnegie Observatories, Pasadena CA 91101 Abstract. We review recent scientific results from the Galaxy Evolution Explorer with special emphasis on star formation in nearby resolved galaxies. INTRODUCTION The Satellite The Galaxy Evolution Explorer (GALEX) is a NASA Small Explorer class mission. It consists of a 50 cm-diameter, modified Ritchey-Chrétien telescope with four operating modes: Far-UV (FUV) and Near-UV (NUV) imaging, and FUV and NUV spectroscopy. Æ The telescope has a 3-m focal length and has Al-MgF2 coatings. The field of view is 1.2 circular. An optics wheel can position a CaF2 imaging window, a CaF2 transmission grism, or a fully opaque mask in the beam. Spectroscopic observations are obtained at multiple grism-sky dispersion angles, so as to mitigate spectral overlap effects. The FUV (1528Å: 1344-1786Å) and NUV (2271Å: 1771-2831Å) imagers can be operated one at a time or simultaneously using a dichroic beam splitter. The detector system encorporates sealed-tube microchannel-plate detectors. The FUV detector is preceded by a blue-edge filter that blocks the night-side airglow lines of OI1304, 1356, and Lyα. The NUV detector is preceded by a red blocking filter/fold mirror, which produces a sharper long-wavelength cutoff than the detector CsTe photocathode and thereby reduces both zodiacal light background and optical contamination. The peak quantum efficiency of the detector is 12% (FUV) and 8% (NUV). The detectors are linear up to a local (stellar) count-rate of 100 (FUV), 400 (NUV) cps, which corresponds to mAB 14 15. -

Search for the Common Power Law Spectrum in Parker Solar Probe's IS
Search for the Common Power Law Spectrum in Parker Solar Probe’s IS☉IS-EPILo Data Asher Merrill Advisors: Dr. Jonathan Niehof and Dr. Nathan Schwadron Abstract I investigate the first year and a half of Parker Solar Probe's data to Analysis find evidence of the common power law spectrum of ions proposed by Gloeckler et. al. (2000) within 0.3 AU. I find weak evidence to suggest the existence of a common spectrum of protons from ~60 keV to 200 keV Event Selection inside the region being studied. Further work is required to elucidate the It is necessary to identify solar wind events in order to phenomena in this region that determine the shape of the solar wind have significant counting statistics above background. Solar spectra. wind events were identified by eye. Fitting Fisk & Gloeckler (2006) suggest a model of compressional acceleration in solar wind turbulence that predicts a Introduction functional dependence of flux on energy as shown above. For each event, the flux was averaged along time, and then a fit to The Advanced Composition Explorer and the Ulysses spacecraft this model was applied between ~60 keV and 200 keV, revealed the presence of a common power-law spectrum of ions in the depending on data source. solar wind, the shape of which is independent of solar activity. The highest energy particles in this distribution are a direct interest to human affairs as Analysis of variance of magnetic field vs radial distance. they can serve as the seed population for large, destructive events that can Event Type Analysis Schwadron et. -

Interstellar Probe to Explore the Sun's Influences Propagating Beyond The
Interstellar Probe to Explore the Sun’s Influences Propagating Beyond the Heliosphere Parisa Mostafavi�, G. P. Zank�, D. J. McComas�, L. Burgala4, J. Richardson5, G. Webb2, E. Provornikova1, P. Brandt1 1. Johns Hopkins University Applied Physics Lab, 2. University of Alabama in Huntsville, 3. Princeton University, 4. NASA Goddard Space Flight Center, 5. Massachusetts Institute of Technology Introduction The heliosphere is controlled by the motion of the Sun through the interstellar space. Although humankind has explored the region of space about the Earth quite extensively, the distant heliosphere beyond the planets remains almost entirely unexplored with only the two Voyager spacecraft, New Horizons, and the early Pioneer 10 and 11 spacecraft returning the in-situ observations of this most distant region. Moreover, remote observations of energetic neutral atoms (ENAs) from the Interstellar Boundary Explorer (IBEX) at 1 au and Cassini/INCA at 10 au revealed interesting structure related to the interstellar medium. Voyager 1 and 2 crossed the heliopause in 2012 and 2018, respectively, and are both continue to make in-situ measurements of the very local interstellar medium (VLISM; the nearby region of the LISM affected by physical processes associated with the heliosphere) for the first time. Voyager 1 and 2 have identified and partially answered many interesting questions about the outer heliosphere and the VLISM while raising numerous new questions, many of which have profound implications for the detailed structure and properties of the heliosphere and our place in the galaxy. One particularly interesting topic is the influence of the large-scale disturbances and small-scale turbulences generated by the dynamical Sun on the VLISM. -

Interstellar Heliospheric Probe/Heliospheric Boundary Explorer Mission—A Mission to the Outermost Boundaries of the Solar System
Exp Astron (2009) 24:9–46 DOI 10.1007/s10686-008-9134-5 ORIGINAL ARTICLE Interstellar heliospheric probe/heliospheric boundary explorer mission—a mission to the outermost boundaries of the solar system Robert F. Wimmer-Schweingruber · Ralph McNutt · Nathan A. Schwadron · Priscilla C. Frisch · Mike Gruntman · Peter Wurz · Eino Valtonen · The IHP/HEX Team Received: 29 November 2007 / Accepted: 11 December 2008 / Published online: 10 March 2009 © Springer Science + Business Media B.V. 2009 Abstract The Sun, driving a supersonic solar wind, cuts out of the local interstellar medium a giant plasma bubble, the heliosphere. ESA, jointly with NASA, has had an important role in the development of our current under- standing of the Suns immediate neighborhood. Ulysses is the only spacecraft exploring the third, out-of-ecliptic dimension, while SOHO has allowed us to better understand the influence of the Sun and to image the glow of The IHP/HEX Team. See list at end of paper. R. F. Wimmer-Schweingruber (B) Institute for Experimental and Applied Physics, Christian-Albrechts-Universität zu Kiel, Leibnizstr. 11, 24098 Kiel, Germany e-mail: [email protected] R. McNutt Applied Physics Laboratory, John’s Hopkins University, Laurel, MD, USA N. A. Schwadron Department of Astronomy, Boston University, Boston, MA, USA P. C. Frisch University of Chicago, Chicago, USA M. Gruntman University of Southern California, Los Angeles, USA P. Wurz Physikalisches Institut, University of Bern, Bern, Switzerland E. Valtonen University of Turku, Turku, Finland 10 Exp Astron (2009) 24:9–46 interstellar matter in the heliosphere. Voyager 1 has recently encountered the innermost boundary of this plasma bubble, the termination shock, and is returning exciting yet puzzling data of this remote region. -

A Quality Constrained Themis Daytime Infrared Global Mosaic
47th Lunar and Planetary Science Conference (2016) 2326.pdf A QUALITY CONSTRAINED THEMIS DAYTIME INFRARED GLOBAL MOSAIC. J. R. Hill1 and P. R. Christensen1; 1School of Earth and Space Exploration, Arizona State University, Tempe, AZ 85287-6305 ([email protected]). Introduction: The 2001 Mars Odyssey spacecraft registration is rarely perfect, offsets are usually small entered orbit around Mars on October 24th, 2001 and relative to the 100 m/pixel resolution of the mosaic. is the longest-operating spacecraft in the history of However, in cases where the Hill et al. [4] daytime Mars exploration. The Thermal Emission Imaging Sys- global mosaic contained images with large offsets (due tem (THEMIS) has been acquiring observations in both to extrapolations over gaps in spacecraft position and infrared and visible wavelengths since the beginning of pointing telemetry, etc), the images were removed and science operations in February 2002. While previously replaced by images with better geometry data. An ex- assembled THEMIS global mosaics have focused only ample of this correction is shown in Figure 1. on spatial coverage, this new daytime global infrared Noisy Images Replaced. The Hill et al. [4] daytime mosaic has been optimized to include only the best global mosaic also contained numerous images with quality images acquired over the first fourteen years of significant noise resulting from low surface tempera- the mission while still maintaining global coverage. tures, atmospheric effects, etc. These poor-quality im- Background: The THEMIS instrument consists of ages were identified and replaced by higher-quality two multispectral imaging subsystems; a ten-band images, where possible, as demonstrated in Figure 2. -

NASA Celebrates Voyager and NASA IBEX Study Reveals New Dynamics of the Heliospheric Boundary
NASA Celebrates Voyager and NASA IBEX Study Reveals New Dynamics of the Heliospheric Boundary September 5, 2017 marked the 40th anniversary of the 1977 Voyager 1 spacecraft launch. Voyager 2 was launched on August 20, 1977. Although Voyager 1 was launched a few weeks after Voyager 2, it quickly sped ahead of Voyager 2 in space and today is the farthest spacecraft from Earth at 13 billion miles. Voyager 2 is the second farthest, with both spacecraft venturing where no human-made object has ever gone: into interstellar space. Voyager 1 is already outside the heliosphere. Voyager 2 is not far behind, approaching the heliopause, the critical boundary separating the solar wind from interstellar space. The NASA Heliophysics Interstellar Boundary Explorer (IBEX) mission, launched in 2008, is the first spacecraft designed to collect data across the entire sky about the heliosphere and the solar system’s boundary with interstellar space. A recent analysis of IBEX data has shown how the heliosphere “reacts” to the changes in polar coronal holes, which change in size with the 11-year solar cycle. A study by a team of scientists led by Dr. Eric Zirnstein of Princeton University analyzed IBEX observations of Energetic Neutral Atoms (ENAs) collected between 2009 and 2015 over a range of energies (speeds of ~350 to 900 km/s). The team was able to track the Sun’s polar winds as they traveled out to the outer heliosphere, where they interacted with hydrogen atoms, creating ENA’s speeding back into the heliosphere towards the Sun. Analysis of IBEX data reveals it takes the solar wind near the Sun around two to three years to travel out to the heliosphere and then back toward the Sun to be seen in the data as ENAs. -

Cosmic Microwave Background Radiometers
Low noise millimeter wave receivers for Cosmic Microwave Background radiometers Eduardo Artal, Beatriz Aja, Luisa de la Fuente, Juan Luis Cano, Enrique Villa, Jaime Cagigas (1) Enrique Martínez-González, Francisco Casas, David Ortiz (2) (1) Departamento de Ingeniería de Comunicaciones, Universidad de Cantabria. Santander. (2) Instituto de Física de Cantabria. Santander. Jornadas de Instrumentación Espacial Astro Madrid 29-30 June 2011 1 Astromadrid 30-June-2011 Summary Introduction Cosmic Microwave Background. Spatial missions NASA missions European Space Agency and Planck mission Planck satellite receivers Microwave polarimeters in “El Teide” Polar modulators, orthomode transducers Low noise receivers 2 Astromadrid 30-June-2011 “Big Bang” and Cosmic Microwave Background Time line of the Universe First stars 200 millions years CMB last interaction 380,000 years Inflation At present 13,700 millions years 0.00 ..(42)..001 seconds 3 Astromadrid 30-June-2011 Cosmic Microwave Background “The earliest image of the Universe” (thousands of millions of years) Cosmic Microwave Image obtained by COBE satellite (NASA) (Celestial sphere deployed) Today: Cosmic Microwave Background (CMB) radiation temperature ≈ - 270 ºC CMB: the relic radiation from the Big Bang, the earliest print of the origin of the Universe (a lot of information about the early state) 4 Astromadrid 30-June-2011 Discovery of Cosmic Microwave Background 1964 Isotropic radio noise from the sky The Horn Antenna, at Bell Telephone Laboratories in Holmdel, New Jersey (constructed in 1959) 5 Astromadrid 30-June-2011 NASA missions: COBE satellite • Satellite launched by NASA in 1989 to test CMB radiation and CMB Far-InfraRed spectrum. • First evidence of CMB anisotropies (1 part in 100,000) 6 Astromadrid 30-June-2011 COBE satellite Artist’s view of COBE satellite in orbit Instruments . -
Nustar Observatory Guide
NuSTAR Guest Observer Program NuSTAR Observatory Guide Version 1.0 (August 2014) NuSTAR Science Operations Center, California Institute of Technology, Pasadena, CA NASA Goddard Spaceflight Center, Greenbelt, MD nustar.caltech.edu heasarc.gsfc.nasa.gov/docs/nustar/index.html i Revision History Revision Date Editor Comments D1,2,3 2014-08-01 NuSTAR SOC Initial draft 1.0 2014-08-15 Release for AO-1 ii Table of Contents Revision History ......................................................................................................................................................... ii 1. INTRODUCTION .................................................................................................................................................. 1 1.1 NuSTAR Program Organization ...................................................................................................................................................................................... 1 2. The NuSTAR observatory .................................................................................................................................... 2 2.1 NuSTAR Performance ......................................................................................................................................................................................................... 3 2.2 Primary mission science observations ......................................................................................................................................................................