Case-Studies in Topology Optimisation of Bracing Systems ROBERT BALDOCK
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Alex Treadway / Design & Photography
ALEX TREADWAY / DESIGN & PHOTOGRAPHY 1 ALEX TREADWAY / DESIGN & PHOTOGRAPHY ICIMOD ICIMOD is a regional knowledge development and learning centre serving the eight regional member countries of the Hindu Kush-Himalayas. Primarily they’re working to develop an economically and environmentally sound mountain ecosystem to improve the livelihoods of mountain populations. They needed a new brand, website, photography and a solid set of guidelines in order to generate publications, books and web pages themselves. I developed an extensive set of templates and guidelines which can be used in an endless variety of ways to keep the them appearing fresh and different, but at the same time consistently looking and behaving as one organisation. The identity subtly highlights two of their key areas: Mountains and Water. 2 ALEX TREADWAY / DESIGN & PHOTOGRAPHY ICIMOD PASSING THE BATON ICIMOD publish a large amount of materials which are almost exclusively produced themselves by their in-house design team. They needed a set of guidelines which would cater for a vast array of different formats and content. I gave them an intuitive system which could adapt as necessary but at the same time be ever-so- simple to use. Now they’re doing it all themselves. 3 ALEX TREADWAY / DESIGN & PHOTOGRAPHY ICIMOD 4 ALEX TREADWAY / DESIGN & PHOTOGRAPHY ICIMOD ICIMOD PHOTOGRAPHY As well as re-establishing ICIMOD’s branding I also travalled to all of their member countries to generate an entire port folio of photography. The result was such a success ICIMOD decided to publish a coffee table book called ‘Life in the Himalayas’ to showcase the photographs and tell their story. -

Building Up: What Are London's Limits?
Building Up Contents Building Up: What are London's limits? 01 Is London falling short on tall buildings? In the first of our ‘Building Up’ series, we look at some of the key challenges to 03 Dame Judith Hackitt’s review following delivering taller developments in the capital. With pressure for growth and land the Grenfell fire: the final values at record levels in certain areas, property experts are seeking innovative report ways to deliver high quality developments at increased densities. In this 04 Whose light is it anyway? Releasing publication, we go beyond the typical issues of planning, construction and lettings rights of light reaches the High to look at the specific issues that come with building up. Court 06 Love thy neighbour: starting your Charles Russell Speechlys cohosted a panel discussion with GIA on ‘London's development on the right foot skyline and the challenges of building up’ on 5 June 2018. At the seminar, we 08 Branding your Building (before drew together industry insight from our panel of experts from across development, someone else does) planning, politics and law and through live polling of our audience of leading 10 The only way is up? How new national professionals working within the real estate sector. This gave us an indepth planning policy will increase understanding of this topic from different perspectives in the market. pressure on building height and density If you have any questions on this publication, please get in touch with 12 About Charles Russell Speechlys Claire Fallows on [email protected] or James Souter on [email protected] with any questions. -

Winners Supplement
INVESTMENT AWARDS Winners Supplement 037_PP_Feb21.indd 37 01/02/2021 15:26 Helping you BUILD YOUR PORTFOLIO through the complexities of pension investment Trustees need a partner to provide bespoke investment solutions for today and tomorrow. And with us, it’s always personal. As a market leader, we use our size to benefit clients by delivering advice with a personal touch – rooted by a thorough knowledge of our clients’ individual needs and preferences, we help schemes to build their own portfolios by deconstructing the complexities of pension scheme investment. So talk to us about your scheme’s investment requirements. For more information, visit aon.com/investmentuk, email [email protected], or call us on 0800 279 5588. Aon Solutions UK Limited Registered in England and Wales No. 4396810 Registered office: The Aon Centre, 122 Leadenhall Street, London, EC3V 4AN. a10144-01 Fiduciary and Investment ad PI_220 x 280_V3.indd 1 6/23/2020 1:01:38 AM PP INVESTMENT AWARDS WINNERS INVESTMENT AWARDS Contents CONTACT 40 Roll of honour 48 Sustainable Equity Manager of the Year Professional Pensions, New London House, 172 Drury Lane, London WC2B 5QR 42 Multi Asset/Sector Credit An interview with Marianne Harper Gow phone Prefix phone numbers with 020 7484 of Baillie Gifford unless specified otherwise Manager of the Year email [email protected] An interview with Campe Goodman of web professionalpensions.com 50 UK & European Commercial @profpensions Wellington Management twitter Real Estate Debt Manager of Editorial 43 Multi-Asset -

Laing 4280.Pdf
PROFESSIONAL PROFILE Andrew Laing Career Summary Director Mr. Laing is a Director in HFF’s London office with more than seven years of experience in commercial real estate. He specializes in the acquisition, disposal, development funding and strategic consultancy of commercial real estate within the London market on behalf of U.K. institutions, REITs, global pension funds, private equity funds and private family offices. Mr. Laing joined the firm in May 2017. He joins HFF from Eastdil Secured, where he was Vice President in the European equity team. Prior thereto, he was an Associate Director at CBRE specializing in central London capital markets with a primary focus on office and retail investments across the West End and City markets. Representative Assignments* PROPERTY TRANSACTION TYPE VALUE The Leadenhall Building, 122 Leadenhall Street Disposal £1,150 billion City Point Tower, 1 Ropemaker Street Disposal £560 million 22 Cross Keys Close The Walbrook Building, 25 Walbrook Disposal £575 million Marylebone London W1U 2DW, UK Carmelite Riverside, 50 Victoria Embankment Disposal £150 million 20 Old Bailey Disposal £90 million T: +44 (0)20 7509 6730 Angel Square Disposal £75 million M: +44 (0)787 560 4424 E: [email protected] Woolgate Exchange, 25 Basinghall Street Acquisition £315 million Centrium, 61 Aldwych Acquisition £170 million Stonecutter Court, 1 Stonecutter Street Acquisition £115 million Specialties 111 Old Broad Street Acquisition £110 million ▪ Central London Real Estate 100 Cheapside Acquisition £95 million ▪ Investment Advisory -

The Aon Centre at the Leadenhall Building
The Aon Centre at The Leadenhall Building The Aon Centre The LeadenhallSouth Place Building +44 (0) 207 086 5516 122 LeadenhallMoorfields Street [email protected] London Eldon Street EC3VMoorgate 4ANMoorgate A501 Middlesex Street Bishopsgate New Street London Wall A1211 Liverpool Street Blomfield Street A10 Old Broad Street Wormwood Street Moorgate Middlesex Street A1211 A1211 A10 Cutler Street Old Broad Street Houndsditch St Helens Place Bishopsgate Gt St Helens Bury Court A1211 Throgmorton Street A1211 St Botolph Street A1210 Bury Street Undershaft Threadneedle Street St Mary Axe Dukes Place Aldgate Bartholomew Lane Bartholomew A1213 The Leadenhall Aldgate High Street Building Bank Threadneedle Street Finch Lane Leadenhall Street Leadenhall Street Cornhill St Botolph Street Lombard Street Aldgate Jewry Street Bank DLR Lime St Birchin Lane Biliter Street Gracechurch Street Whittington Ave Fenchurch Ave King William Street Lloyd’s Avenue Fenchurch Street Vine Street Minories Lombard Street Fenchurch Pl Lime St Fenchurch Street Fenchurch Street Fenchurch Street Crosswall Minores Cannon Street Cooper’s Row Goodman’s Yard Gracechurch Street Mincing Lane Mincing Crutched Friars Monument Mark Lane Tower Gateway Eastcheap DLR Transport links and walking times to The Aon Centre at The Leadenhall Building Liverpool Street National Rail Metropolitan Line Central Line Circle Line Hammersmith & City LIne • • • • 8 minutes Bank • Central Line • Waterloo & City Line • Northern Line DLR 6 minutes Aldgate • Circle Line • Metropolitan Line 6 minutes Fenchurch Street National Rail 5 minutes Monument • District Line • Circle Line 5 minutes Tower Gateway DLR 9 minutes Risk. Reinsurance. Human Resources.. -

British Land Annual Report and Accounts 2009
The British Land Company PLC Annual Report & Accounts 2009 Taking care of business Annual Report & Accounts 2009 WorldReginfo - e7194cc3-b45a-4267-ad65-7fe393cfc19f Contents Overview Governance 1 Foreword 54 Valuation Report 2 Corporate Strategy 56 Directors and Officers Financial Summary 57 Corporate Governance 3 At a Glance 62 Remuneration Report 6 Chairman’s Statement 72 Report of the Directors 8 Chief Executive’s Report Financial Statements Business Review 74 Consolidated Income Statement 12 British Land’s Activity in 2008/9 75 Consolidated Balance Sheet 13 Sector and Asset Selection 76 Consolidated Statement of 15 Asset Management Recognised Income and Expense 18 Development 77 Consolidated Cash Flow Statement 22 Portfolio Valuation 78 Notes to the Accounts 24 Property Sectoral Outlook 79 Performance Measures Retail Sector 81 Staff Costs 26 Office Sector 83 Property 30 Financial Performance 84 Funds and Joint Ventures 33 Financing and Cash Flow 87 Net Debt Financing Policy 91 Dividend 36 Key Performance Indicators 95 Report of the Auditors Risk Management 96 Table A – Summary Income Statement 38 Partnerships and Balance Sheet based on 40 People Proportional Consolidation Corporate Responsibility 98 Company Balance Sheet and Notes Head Office and Registered Office Business Review 101 Ten Year Record York House Directors’ Responsibility Statement 45 Seymour Street Other Information London W1H 7LX Portfolio Description Telephone +44 (0)20 7486 4466 102 Financial Calendar Fax +44 (0)20 7935 5552 42 Out-of-Town Retail 103 Shareholder Information -
PDU Case Report XXXX/YY Date
planning report D&P/3469/02 1 September 2015 6-8 Bishopsgate/150 Leadenhall Street in the City of London planning application no.15/00443/FULMAJ Strategic planning application stage II referral Town & Country Planning Act 1990 (as amended); Greater London Authority Acts 1999 and 2007; Town & Country Planning (Mayor of London) Order 2008 The proposal The demolition of existing buildings and redevelopment of the site to provide a new building comprising lower ground and basement levels (including part basement mezzanine), ground and mezzanine levels plus part 8, part 20 and part 40 storeys (plus plant) to a height of 185.1 metres AOD.The development will provide office (Class B1) use (70,053 sq.m. GEA), flexible shop/cafe and restaurant (Class A1/ A3) uses (418 sq.m. GEA) at part ground floor and mezzanine levels and flexible shop/cafe/restaurant/office (A1/ A3/B1) uses (235 sq.m. GEA) at part of the ground floor and mezzanine levels; and a publicly accessible roof top pavilion at level 40 (sui generis) (795 sq.m. GEA) at level 40; and the provision of hard and soft landscaping (totalling 71,501 sq.m. GEA). The applicant The applicant is MEC London Property (General Partner)/MEC London Property/ MEC London Property 2, and the agent is Gerald Eve and the Architect is Wilkinson Eyre. Strategic issues Issues have been resolved in relation to securing off-site affordable housing, access, energy, and transport. The Council’s decision In this instance City Corporation has resolved to agree a dual recommendation resolving to grant permission but giving delegated authority for officers to refuse permission if the Section 106 agreement is not signed within a specified date. -

Height Vs. History Tall Buildings in the Heart of London Controversy Over Tall Buildings in Central London Is Not a Recent Phenomenon
Height vs. history Tall buildings in the heart of London Controversy over tall buildings in central London is not a recent phenomenon. Peter Stewart explains how heated debates on the issue began as long ago as the late nineteenth century. The proposal for a 250m (820ft) tall residential France, Westminster, completed in 1888 (demolished tower to be built next to Paddington Station – in 1973). Crude and joyless in its design, it was the ‘Paddington Pole’ – is the latest in a line of considerably taller than any other London residential controversial tall-building projects to come forward in building at the time and prompted widespread central London over the last two decades. Designed complaints, including one from Queen Victoria, whose by Renzo Piano, the architect of the ‘Shard’ at London view of the Palace of Westminster from Buckingham Bridge (completed in 2012), and promoted by its Palace was obstructed by the block. Several developer Irvine Sellar, the project has provoked generations of royals later, Prince Charles has proved protests from lay commentators and architects alike. just as vociferous a defender of London’s skyline. Journalist Simon Jenkins, a serial opponent of tall The development of the passenger lift had buildings, complained that the scheme flies in the made tall buildings possible from around 1870 but, face of established planning policies which set out while maximum buildings heights in New York and where tall buildings should and should not be built in Chicago increased rapidly, reaching 240m (787ft) London; and architect Sir Terry Farrell has criticised the with the Woolworth Building in New York by 1913, scheme as piecemeal and opportunistic. -

Tall Buildings URBAN DESIGN GROUP URBAN
Summer 2016 Urban Design Group Journal 13UR 9 BAN ISSN 1750 712X DESIGN TALL BUILDINGS URBAN DESIGN GROUP URBAN DESIGN GROUP NewsUDG NEWS more than this, with people being seen col- Nottingham and Bristol respectively. VIEW FROM THE lectively because of their ‘social values and Noha Nasser and the awards panel CHAIR responsibilities’. As urban designers we are for• continuing to grow the Urban Design members of a community. We share similar Awards. values and take on the duty of improving the Ben van Bruggen and Amanda Reynolds quality of life for people who live and work for• their ongoing stewardship of the Recog- in cities, towns and villages. nised Practitioner scheme. This is the last View from the Chair that I will I would like to use this last article to Barry Sellers for providing oral evidence write for Urban Design and it gives me an thank people within the Urban Design Group on• the Urban Design Group's behalf at the opportunity to reflect on the last two years community for continuing to strive to raise House of Lords' Built Environment Select of my tenure. The time has flown by! the standards in urban design practice. Lack Committee. At last March’s National Urban Design of space precludes me from mentioning The various regional conveners of events, Awards I pondered with Graham Smith, a everyone but the list includes the following particularly• Paul Reynolds and Philip Cave former lecturer at Oxford Brookes Universi- members of the community: in London; Peter Frankum in Southampton; ty, the use of the word ‘community’ for new Robert Huxford and Kathleen Lucey for Mark Foster and Hannah Harkis in Manches- developments. -

Situated on the 42Nd Floor of “The Cheesegrater” and Opening in August 2015, Floor 42 Is London’S Newest Event Space
122 LEADENHALL STREET, LONDON EC3V 4AB Situated on the 42nd floor of “The Cheesegrater” and opening in August 2015, Floor 42 is London’s newest event space. Located 650ft above the street in the heart of the City’s financial district and served by the fastest scenic lifts in Europe, the venue offers spectacular views of the river and many of London’s major landmark buildings from its triple aspect floor-to-ceiling windows. Floor 42 is London’s highest exclusive dedicated events venue, offering over 6,000 sq. ft. of flexible space for conferences, product launches, receptions and dinners for up to 300 delegates or guests. To find out more visit venueseeker.com/cheesegrater. R A L S T Y T U L E C E I T H C R A REGIONAL RANKING #27 TALLEST IN EUROPE NATIONAL RANKING #4 225m (48 STOREYS) HEIGHT: TALLEST IN UNITED KINGDOM OF THE H FLOO L C D I A R E F E 4 E T R 2 P S S O I N T L E I F M I T WERE USED IN THE T LEGO MODEL OF THE BUILDING, WHICH CAN BE FOUND IN THE RECEPTION Floor 42, The Leadenhall Building has been fitted-out with the very latest lighting and sound installation and has floor-to-ceiling glazing, offering stunning views of London’s skyline. Capacities Meetings and Conferences 100 - 300 Seated Lunches and Dinners 120 - 250 Receptions 150 - 300 Technical Specifications Floor 42 has been finished to the highest standards, including: • LED colour-changing uplighters and wash lighting • Moving lights and DJ sound system • Zoned sound system for speeches and background music • Stage, projector and screen • Conference, dining and reception furniture • Travera screening for room division The venue has partnered exclusively with one of London’s leading event caterers, Create Food and Party Design, to deliver imaginative menus and excellent service to all events at Floor 42. -

Rpt MFI-EU Hard Copy Annual Publication
MFI ID NAME ADDRESS POSTAL CITY HEAD OFFICE RES* UNITED KINGDOM Central Banks GB0425 Bank of England Threadneedle Street EC2R 8AH London No Total number of Central Banks : 1 Credit Institutions GB0005 3i Group plc 91 Waterloo Road SE1 8XP London No GB0015 Abbey National plc Abbey National House, 2 Triton NW1 3AN London No Square, Regents Place GB0020 Abbey National Treasury Services plc Abbey National House, 2 Triton NW1 3AN London No Square, Regents Place GB0025 ABC International Bank 1-5 Moorgate EC2R 6AB London No GB0030 ABN Amro Bank NV 10th Floor, 250 Bishopsgate EC2M 4AA London NL ABN AMRO Bank N.V. No GB0032 ABN AMRO Mellon Global Securities Services Princess House, 1 Suffolk Lane EC4R 0AN London No BV GB0035 ABSA Bank Ltd 75 King William Street EC4N 7AB London No GB0040 Adam & Company plc 22 Charlotte Square EH2 4DF Edinburgh No GB2620 Ahli United Bank (UK) Ltd 7 Baker Street W1M 1AB London No GB0050 Airdrie Savings Bank 56 Stirling Street ML6 OAW Airdrie No GB1260 Alliance & Leicester Commercial Bank plc Building One, Narborough LE9 5XX Leicester No GB0060 Alliance and Leicester plc Building One, Floor 2, Carlton Park, LE10 0AL Leicester No Narborough GB0065 Alliance Trust Savings Ltd Meadow House, 64 Reform Street DD1 1TJ Dundee No GB0075 Allied Bank Philippines (UK) plc 114 Rochester Row SW1P 1JQ London No GB0087 Allied Irish Bank (GB) / First Trust Bank - AIB 51 Belmont Road, Uxbridge UB8 1SA Middlesex No Group (UK) plc GB0080 Allied Irish Banks plc 12 Old Jewry EC2R 8DP London IE Allied Irish Banks plc No GB0095 Alpha Bank AE 66 Cannon Street EC4N 6AE London GR Alpha Bank, S.A. -
Building Foundations
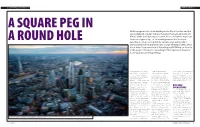
A SQUARE PEG IN A ROUND HOLE WEALTH CREATION A SQUARE PEG IN 22 Bishopsgate is the tallest building in the City of London and the second tallest in western Europe. However, the most extraordinary feature of this new skyscraper is not its sheer size, but the ingenious structural engineering – or ‘structural gymnastics’ as the team A ROUND HOLE describes it – that has enabled the remains of an earlier, failed development to be transformed into a large efficient modern office block. Hugh Ferguson talked to Peter Rogers CBE FREng, co-founder of the project’s developer Lipton Rogers Developments, about the building’s innovative engineering. Modern high-rise work spaces The Pinnacle had severe was a chance to put the exercise in the City of London have led drawbacks. It was inefficient into practice. The challenge was to a succession of instantly and expensive to build: its to create a building the same recognisable iconic structures tapering, spiralling shape height as The Pinnacle, but with with quirky nicknames – ‘The allowed little opportunity for a third more lettable space, no Gherkin’, ‘The Walkie-Talkie’ and repetition in construction with more weight and at less cost. ‘The Cheesegrater’. The tallest its highly complex engineering and most eye-catching of all and irregular floor spaces. Also, was set to be ‘The Pinnacle’, post-2008 developers wanted BUILDING a twisting, tapering tower, efficient buildings, attractive FOUNDATIONS provisionally nicknamed to both businesses and their The basic design of the new The Helter Skelter. However, employees, which would help 62-storey block, provisionally following the 2008 property draw activity back into the City.