Behind the E Numbers - a Look at Some of the Design Analysis for the E5 Cherub
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Speakers Discuss of School Money The
Vol. X I. No. 44 OCEAN GROVE, NEW JERSEY, SATURDAY, OCTOBER 31, 1903. One Dollar the Y ear. PREACHERS’ MEETINGS A. SOCIAL EVENT OF DANIEL W. APPLEGATE SPEAKERS DISCUSS THIS WEEK AND NEXT THE LATE FALL SEASON WEDS MISS ANNA REED Local Clergymen Will Go: to Freehold OF SCHOOL MONEY Mr, and Mrs. Carr Celebrate the An THE STATUE FUND Their Marriage Followed by Sere the .Coming Maaday .. y ; niversary of Their Wedding nade and Surprise Party FINAL POLITICAL MEETING BE At the preachers’ meeting in St. RECENT LAW MAKES TOWNSHIP. Mastering every detail that would M ATTER IN HANDS OF THE STOKES’ Daniel W. Applegate and Miss Anna .Paul’s church, Ocean Grove, on Mon contribute In any wise to the pleasure Reed, both of Ocean Grove, were’mar- . FORE FALL ELECTION day morning, tit. exercises- were TREASURER THAT OFFICER of tileir guests, Mr.. .and Mrs. R. H. ,; " FINANCE COMMITTEE ried on Sunday last at the parsonage opened with prayer by the Rev. W. W. Carr,' of Brooklyn, celebrated their of the Hamilton M. E. Church by tho. RIdgely, o£ West Park. On the sail wedding anniversary last Saturday Rev. W. E. Blackiston/ The bride is <jf committees the Rev H. Jt .Hayter, evening a t their Biimmer .home, 79 Pil the daughter of Mr. and Mrs, Aaron. ALL OVER BUT SHOUTING of Bradley Beach, read on article TRUSTEE BittDNER IS OUT grim Pathway. In attendance at this NOW ALL WAY CONTRIBUTE Reed, of 119 Abbott avenue. Mr. Ap showing the agitation of the Temper event were Mrs. M. -

2015-2016 Cherub Nationals Sailing Instructions
53rd Australian Cherub Championship Royal Queensland Yacht Squadron, Brisbane, QLD 28th December 2015 to 3rd January 2016 SAILING INSTRUCTIONS The 53rd Australian Cherub Championships will be conducted on Waterloo Bay, Brisbane, Queensland from 28th December 2015 to 3rd January 2016 inclusive. The Organising Authority will be the Royal Queensland Yacht Squadron Inc. (RQYS) on behalf of the Cherub Class Owners Association of Queensland. 1. RULES 1.1 The regatta will be governed by the rules as defined in: (a) The Racing Rules of Sailing (RRS), (b) The Prescriptions and Special Regulations of Yachting Australia, (c) The 53rd Australian Cherub Championships Sailing Instructions, (d) The Cherub National Council of Australia Constitution and By-laws (found on the national website www.cherub.org.au or by contacting the National Secretary). 2. NOTICES TO COMPETITORS Notices to competitors will be posted on the official notice board located on the rigging lawn adjacent to the RQYS Sailing Office. 3. CHANGES TO SAILING INSTRUCTIONS Any changes to the Sailing Instructions will be posted not less than ninety (90) minutes before the next scheduled start, except that any change in the schedule of races will be posted by 1900 hours on the day before it will take effect. 4. ADVERTISING The Cherub class is classed as Category “A” in accordance with the ISAF Regulation 20.4.1. Competitors may be required to carry event sponsors’ stickers as set out in the Sailing Instructions and may, at the discretion of the organising authority, be required to remove any other advertising the organising authority considers to be inappropriate. -
Catalyst N05 Jul 200
Catalyst Journal of the Amateur Yacht Research Society Number 5 August, 2001 Catalyst News and Views 3 Winds of Change 2001 6 Keiper Foils 7 Letters Features 10 Wind Profiles and Yacht Sails Mike Brettle 19 Remarks on Hydrofoil Sailboats Didier Costes 26 Designing Racing Dinghies Part 2 Jim Champ 29 Rotors Revisited Joe Norwood Notes from Toad Hill 33 A Laminar Flow Propulsion System Frank Bailey 36 Catalyst Calendar On the Cover Didier Costes boats (See page 19) AUGUST 2001 1 Catalyst Meginhufers and other antiquities I spent most of July in Norway, chasing the midnight sun Journal of the and in passing spending a fair amount of time in Norway’s Amateur Yacht Research Society maritime museums looking at the development history of the smaller Viking boats. Editorial Team — Now as most AYRS members will know, the Vikings rowed Simon Fishwick and sailed their boats and themselves over all of Northern Sheila Fishwick Europe, and as far away as Newfoundland to the west and Russia and Constantinople to the east. Viking boats were Dave Culp lapstrake built, held together with wooden pegs or rivets. Specialist Correspondents Originally just a skin with ribs, and thwarts at “gunwale” level, th Aerodynamics—Tom Speer by the 9 century AD they had gained a “second layer” of ribs Electronics—David Jolly and upper planking, and the original thwarts served as beams Human & Solar Power—Theo Schmidt under the decks. Which brings us to the meginhufer. Hydrofoils—George Chapman I’m told this term literally means “the strong plank”, and is Instrumentation—Joddy Chapman applied to what was once the top strake of the “lower boat”. -

An Ambivalent Ground: Re-Placing Australian Literature
An Ambivalent Ground: Re-placing Australian Literature James Paull A Thesis submitted for the degree of Doctor of Philosophy of the University of New South Wales 2007 PLEASE TYPE THE UNIVERSITY OF NEW SOUTH WALES Thesis/Dissertation Sheet Surname or Family name: PAULL First name: JAMES Other name/s: CAMPBELL Abbreviation for degree as given in the University calendar: PhD School: English, Media and Performing Arts Faculty: Arts Title: An Ambivalent Ground: Re-placing Australian Literature Abstract 350 words maximum: (PLEASE TYPE) Narratives of place have always been crucial to the construction of Australian identity. The obsession with identity in Australia betrays longstanding uncertainty. It is not difficult to interpret in this uncertainty a replaying of the deeper insecurities surrounding the settler community's legal and more broadly cultural claims to the land. Such insecurities are typically understood negatively. In contrast, this thesis accepts the uncertainty of identity as an activating principle, appropriate to any interpretation of the narratives and themes that inform what it means to be Australian. Fundamental to this uncertainty is a provisionality in the post-colonial experience of place that is papered over by misleadingly coherent spatial narratives that stem from the imperial inheritance of Australian mythology. Place is a model for the tension between the coherence of mythic narratives and the actual rhizomic formlessness of daily life. Place is the ‘ground’ of that life, but an ambivalent ground. An Ambivalent Ground approaches postcolonial Australia as a densely woven text. In this text, stories that describe the founding of a nation are enveloped by other stories, not so well known, that work to transform those more familiar narratives. -

NS14 ASSOCIATION NATIONAL BOAT REGISTER Sail No. Hull
NS14 ASSOCIATION NATIONAL BOAT REGISTER Boat Current Previous Previous Previous Previous Previous Original Sail No. Hull Type Name Owner Club State Status MG Name Owner Club Name Owner Club Name Owner Club Name Owner Club Name Owner Club Name Owner Allocated Measured Sails 2070 Midnight Midnight Hour Monty Lang NSC NSW Raced Midnight Hour Bernard Parker CSC Midnight Hour Bernard Parker 4/03/2019 1/03/2019 Barracouta 2069 Midnight Under The Influence Bernard Parker CSC NSW Raced 434 Under The Influence Bernard Parker 4/03/2019 10/01/2019 Short 2068 Midnight Smashed Bernard Parker CSC NSW Raced 436 Smashed Bernard Parker 4/03/2019 10/01/2019 Short 2067 Tiger Barra Neil Tasker CSC NSW Raced 444 Barra Neil Tasker 13/12/2018 24/10/2018 Barracouta 2066 Tequila 99 Dire Straits David Bedding GSC NSW Raced 338 Dire Straits (ex Xanadu) David Bedding 28/07/2018 Barracouta 2065 Moondance Cat In The Hat Frans Bienfeldt CHYC NSW Raced 435 Cat In The Hat Frans Bienfeldt 27/02/2018 27/02/2018 Mid Coast 2064 Tiger Nth Degree Peter Rivers GSC NSW Raced 416 Nth Degree Peter Rivers 13/12/2017 2/11/2013 Herrick/Mid Coast 2063 Tiger Lambordinghy Mark Bieder PHOSC NSW Raced Lambordinghy Mark Bieder 6/06/2017 16/08/2017 Barracouta 2062 Tiger Risky Too NSW Raced Ross Hansen GSC NSW Ask Siri Ian Ritchie BYRA Ask Siri Ian Ritchie 31/12/2016 Barracouta 2061 Tiger Viva La Vida Darren Eggins MPYC TAS Raced Rosie Richard Reatti BYRA Richard Reatti 13/12/2016 Truflo 2060 Tiger Skinny Love Alexis Poole BSYC SA Raced Skinny Love Alexis Poole 15/11/2016 20/11/2016 Barracouta -

UK Cherub Class Rules 2011
UK Cherub Class Rules 2011 1 INTRODUCTION The object of these rules is to provide a set of rules to which inexpensive high performance dinghies may be designed and built. 2 CONSTITUTION 2.1 ADMINISTRATION The Association shall hold an Annual General Meeting (AGM), normally at the National Championship. The date and venue of the AGM shall be published at least one month before it is due to be held. The AGM shall elect the following Association Officials: President, Secretary, Treasurer, Registrar, and Technical Officer. It may also elect the following additional Officials: Magazine Editor, Publicity Officer, Fixtures Secretary. All these Officials shall be members of the Association Committee. The AGM may elect additional committee members up to a total of ten. 2.2 AMENDMENTS TO CLASS RULES Changes to these Class Rules may only be made as a result of a 2/3 majority vote in favour in a postal ballot of all paid up members of the association. Proposals for changes to these rules may be submitted to the Association Committee at any time. Such proposals must be signed by five members and must detail the precise wording of the proposed change. The Committee shall consider each proposal and may suggest possible changes to the proposers. The final wording shall be agreed upon within four months of the original submission. The Committee shall, within a further three months, conduct a postal ballot of all members. The ballot shall include the full detailed wording of the proposals, any explanation submitted by the proposers and any comments from the Committee or Technical Officer. -

Northbridge Sailing Club 2015-2016 Season Report Part 2
Main Clubhouse: Bethwaite Lane, Clive Park, Northbridge Seaforth Clubhouse annex: Sangrado Street, Seaforth Postal Address: PO Box 39 Northbridge NSW 2063 Northbridge Sailing Club 2015-2016 Season Report Part 2 Flying 11 Report 2015-2016 The 2015/16 season has seen the Flying 11 Program go from strength to strength with a record 17 boats registered and regular fleets in excess of 12. The kids have had FUN and it is always a tremendous sight to see them learn and grow in confidence. We had a range of abilities from front of the fleet regatta sailors through to club sailors still learning to confidently sail in all weathers and everything in between. The Flying 11 Program has been ably coached by Evan Andrews and assisted by a hard- working and enthusiastic parent group. Club Championship The Club Championship was a close tussle between Rebecca Hancock/Eve Peel and Jack Taylor/Shuhei Tomishima with Rebecca and Eve proving the form sailors of the season. The club Championship places were 1st Rebecca Hancock and Eve Peel, 2nd Jack Taylor and Shuhei Tomishima and 3rd Kashi Saunders and Bezi Saunders. Northridge Sailing Club Season Report 2015-16 page 2 Figure 1 Flying 11 Sailing at its Best – Fresh and Fast Other NSC Trophies In other NSC trophies Jack Taylor and Shuei cleaned up the Afternoon Point Score, followed by Kashi and Bezi and Maddy Sloane and Isobel Gosper. Maddy and Isobel turned out to be the perpetual trophy specialists winning the President’s Plate, the Punchbowl Pennant and the Commodores Cup with Warwick Taylor and Namika Keogh 2nd and Sasha Zenari and Thomas Westwood 3rd in the President’s Plate. -
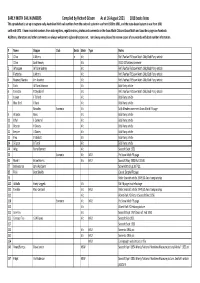
EARLY MOTH SAIL NUMBERS Compiled by Richard Gibson As At
EARLY MOTH SAIL NUMBERS Compiled by Richard Gibson As at 16 August 2021 1018 boats listed This spreadsheet is set up to capture early Australian Moth sail numbers from the national system in use from 1928 to 1961, and the state-based system in use from 1961 until mid-1973. I have recorded numbers from club registers, regatta entries, photos and comments on the Scow Moth Club and Scow Moth and Lowriders pages on Facebook. Additions, alterations and other comments are always welcome to [email protected]. I am always very pleased to receive copies of any records with boat number information. # Name Skipper Club Exists State Type Notes 1 Olive L Morris x Vic Ref J Fairfax FB Scow Moth Club/Bob Parry article Olive Jack Newey Vic 1932-33 Nationals winner 2 Whoopee William Gidney Vic Ref J Fairfax FB Scow Moth Club/Bob Parry article 3 Flutterby L Morris Vic Ref J Fairfax FB Scow Moth Club/Bob Parry article 4 Roamer/Marina Jim Newton Vic Ref J Fairfax FB Scow Moth Club/Bob Parry article 5 Twin William Johnson Vic Bob Parry article 6 Toinette R Drysdale? Vic Ref J Fairfax FB Scow Moth Club/Bob Parry article 7 Lowan F Titford Vic Bob Parry article 8 Blue Bird I Black Vic Bob Parry article Meaden Sorrento Vic Sally Meaden comment Scow Moth FB page 9 Atlantic Rees Vic Bob Parry article 10 Ethyl E Dymond Vic Bob Parry article 11 Desoto H Davey Vic Bob Parry article 12 Empire A Davey Vic Bob Parry article 13 Flea J Mabbitt Vic Bob Parry article 14 Skipton D Tuttle Vic Bob Parry article 44 Wag Barry Bennett Vic Seacraft Sept 1953 50 Sorrento Vic Mk2 -

Portsmouth Number List 2016
Portsmouth Number List 2016 The RYA Portsmouth Yardstick Scheme is provided to enable clubs to allow boats of different classes to race against each other fairly. The RYA actively encourages clubs to adjust handicaps where classes are either under or over performing compared to the number being used. The Portsmouth Yardstick list combines the Portsmouth numbers with class configuration and the total number of races returned to the RYA in the annual return. This additional data has been provided to help clubs achieve the stated aims of the Portsmouth Yardstick system and make adjustments to Portsmouth Numbers where necessary. Clubs using the PN list should be aware that the list is based on the typical performance of each boat across a variety of clubs and locations. Experimental numbers are based on fewer returns and are to be used as a guide for clubs to allocate as a starting number before reviewing and adjusting where necessary. The list of experimental Portsmouth Numbers will be periodically reviewed by the RYA and is based on data received from the PY Online website (www.pys.org.uk). Users of the PY scheme are reminded that all Portsmouth Numbers published by the RYA should be regarded as a guide only. The RYA list is not definitive and clubs should adjust where necessary. For further information please visit the RYA website: http://www.rya.org.uk/racing/Pages/portsmouthyardstick.aspx RYA PN LIST - Dinghy Change Class Name No. of Crew Rig Spinnaker Number Races Notes from '15 420 2 S C 1105 0 278 2000 2 S A 1101 1 1967 29ER 2 S A -

2021 Boat Parking Fees
2021 Boat Parking Fees Fee payable: boat length x beam rounded to closest sq. m. Main compound: £9 per sq. m. Minster compound: £4.5 per sq. m. COST PER YEAR: Class Length Beam m2 MAIN compound MINSTER compound 29er 4.45 1.77 8 £72 £36 29erxx 4.45 1.77 8 £72 £36 420 4.2 1.71 7 £63 £32 470 4.7 1.68 8 £72 £36 49er 4.99 2.9 14 £126 £63 505 5.05 1.88 9 £81 £41 Access 2.3 2.3 1.25 3 £27 £14 Access 303 3.03 1.35 4 £36 £18 Albacore 4.57 1.53 7 £63 £32 B14 4.25 3.05 13 £117 £59 Blaze 4.2 2.48 10 £90 £45 Bobbin 2.74 1.27 3 £27 £14 Boss 4.9 2 10 £90 £45 Bosun 4.27 1.68 7 £63 £32 Buzz 4.2 1.92 8 £72 £36 Byte 3.65 1.3 5 £45 £23 Cadet 3.22 1.27 4 £36 £18 Catapult 5 2.25 11 £99 £50 Challenger Tri 4.57 3.5 16 £144 £72 Cherub 3.7 1.8 7 £63 £32 Comet 3.45 1.37 5 £45 £23 Comet Duo 3.57 1.52 5 £45 £23 Comet Mino 3.45 1.37 5 £45 £23 Comet Race 4.27 1.63 7 £63 £32 Comet Trio 4.6 1.83 8 £72 £36 Comet Versa 3.96 1.65 7 £63 £32 Comet XTRA 3.45 1.37 5 £45 £23 Comet Zero 3.45 1.42 5 £45 £23 Contender 4.87 1.5 7 £63 £32 Cruz 4.58 1.82 8 £72 £36 Dart 15 4.54 2.13 10 £90 £45 Dart 16 4.8 2.3 11 £99 £50 Dart 18 5.5 2.29 13 £117 £59 Dart Hawk 5.5 2.6 14 £126 £63 Enterprise 4.04 1.62 7 £63 £32 Escape 12 3.89 1.52 6 £54 £27 Escape Captiva 3.6 1.6 6 £54 £27 Escape Mango 2.9 1.2 3 £27 £14 Escape Playcat 4.8 2.1 10 £90 £45 Escape Rumba 3.9 1.6 6 £54 £27 Escape Solsa 2.9 1.2 3 £27 £14 Europe 3.38 1.41 5 £45 £23 F18 5.52 2.6 14 £126 £63 Finn 4.5 1.5 7 £63 £32 Fireball 4.93 1.37 7 £63 £32 Firefly 3.66 1.42 5 £45 £23 Flash 3.55 1.3 5 £45 £23 Flying Fifteen 6.1 1.54 9 £81 £41 -

Curriculum Vitae
CURRICULUM VITA GERTRUDE MARILYN TINKER SACHS, PH.D. POSITION Department Chair JAN 5, 2015 - Associate Professor, Tenured 2008–PRESENT English to Speakers of Other Languages (ESOL) Language, Literacy Georgia State University College of Education Department of Middle and Secondary Education SOCIAL PROFILE Academia.edu https://gsu.academia.edu/GertrudeTinkerSachs Linked-in www.linkedin.com/pub/gertrude-tinker-sachs/9a/122/571/ OFFICE ADDRESS 30 Pryor Street, Room 647, Atlanta, Georgia 30303 P. O. Box 3978, Atlanta, GA 30302-3978 Phone: 404.413.8384 / Fax: 404.413.8063 Email: [email protected] EDUCATION Doctor of Philosophy (Ph.D.) 1989 Department of Curriculum Ontario Institute for Studies in Education University of Toronto Focus of Studies: Reading and Language Development Dissertation Topic: Levels of Cultural Familiarity and Strategy Use in Reading Comprehension Committee Members: Dr. Carl Bereiter (Chair), Dr. Dale Willows, Dr. Michael Canale; University External Examiner – Dr. Ellen Bialystock (York University) http://scholarworks.gsu.edu/mse_facpub/ Master of Education (M.A.) Gertrude M. Tinker Sachs, Ph.D. November 2015 Page 1 Department of Curriculum Ontario Institute for Studies in Education University of Toronto Focus of Studies: Reading Thesis Topic: Dialect and Reading: The Question of Interference http://scholarworks.gsu.edu/mse_facpub/ Master of Science in Education (M.Sc.) 1981 (part-time, Bahamas campus) School of Education University of Miami Focus of Studies: Education, Language and Reading Bachelor of Education (B.Ed.) -

Yachting Western Australia – Yearbook 2013 – 2014 | Page 1 YACHTING WESTERN AUSTRALIA (INC)
YEAR BOOK 2013-2014 SHACKS HOLDEN SUPPORTING YOU ON WATER & LAND. SHACKS HOLDEN SUPPORTING YOU ON WATER & LAND. 9432 9432 SHACKS 64 QUEEN VICTORIA ST FREMANTLE www.shacksholden.com.au HOLDEN 9432 9432 SHACKS 64 QUEEN VICTORIA ST FREMANTLE [email protected] HOLDEN [email protected] DL3711 INDEX YWA Office Bearers 2 INFORMATION YWA Past Presidents 2 Sailing Pathways 12 YWA Life Members 2 Swan River Racing Committee 13 What Does Yachting WA Do For You 3 Definitions of Coastal Yacht Racing Areas 13 Club Census 18 REPORTS Recreational Skippers Ticket 19 President 5 Affiliated Yacht Clubs 21 General Manager 6 Yacht Club Information 22 Coastal Committee 7 Swan River Yacht Racing Course Marks 26 Offshore Racing Committee 7 Affiliated Class Associations 31 Racing Rules Committee 7 Class Association Information 32 Race Management Committee 8 SPECIAL EVENTS REVIEW Recreational Skippers Ticket 8 Cock of the Swan 2013 41 Safety Committee 8 Fremantle to Bali 42 Swan River Racing Committee 9 Honorary Service 43 Development & participation 9 Ron Tough Yachting Foundation 44 Cruising & Power Yacht Committee 10 WA Yachting Awards 45 Yachting WA Cruising and Power Yacht Committee 11 Front Cover: Tackers Programme at Mandurah Offshore Fishing and Sailing Club YACHTING WA BOARD OF MANAGEMENT 2013-2014 President Vice President Treasurer Board Member Board Member DENYS PEARCE MARK FITZHARDINGE JOHN HEYDON MARK DONATI ALAN JOHNS Board Member since 2010 aBoard Member since Elected August 2009. Elected August 2010 Elected August 2004