A Review of Rail Wheel Contact Stress Problems Apr 1975.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Birthday Parties
£95 for 30 people 30 for £95 £65 for 20 people 20 for £65 Prices head. Please ask for further details. further for ask Please head. supplied by Megabites of Rothwell, from £5 per per £5 from Rothwell, of Megabites by supplied If you wish we can provide food for your party, party, your for food provide can we wish you If new castings for old, missing and broken parts. broken and missing old, for castings new See our collection of historic patterns used to make make to used patterns historic of collection our See are available at the Moor Road shop. Road Moor the at available are Hot and cold drinks and confectionery confectionery and drinks cold and Hot and let the children have fun in the play area. play the in fun have children the let and food for consumption on the train or at Park Halt Halt Park at or train the on consumption for food have a go operating the model train model the operating go a have You are welcome to bring your own own your bring to welcome are You Relax in our cafe with a hot drink and a sandwich, a and drink hot a with cafe our in Relax See the inside of a boiler and learn how it works. it how learn and boiler a of inside the See of a steam locomotive steam a of locomotive and preparing it for your journey ahead. journey your for it preparing and locomotive Climb onto the footplate and learn the controls controls the learn and footplate the onto Climb Watch the crew undertake their duties, caring for the the for caring duties, their undertake crew the Watch Halt and Moor Road after each trip. -

Royal Newcastle Infirmary
Accounting for Healthcare in the Newcastle Infirmary During the 19th Century Andrew John Holden Thesis submitted for the degree of Doctor of Philosophy Newcastle University Business School June 2018 i To Gill, Olly and Emily for all your support, encouragement and love ii Newcastle Infirmary c 1815 Figure 0.1 – The Newcastle Infirmary (Source: Welcome Library Images) To serve the needy, sick and lame, This splendid shilling freely came, From one who knows the want of wealth, And what is more - the want of health. Beneath this roof may thousands find, The greatest blessings of mankind; And hence may millions learn to know, That to do good’s our end below; That Vice and Folly must decay Ere we can reach eternal day! (Anon. Above poem written on a note which enclosed a shilling left in a poor box 1752 – from Hume 1951, p. 5) iii Abstract Accounting played a critical role in the management of the Newcastle Infirmary during the 19th century. In a class-based society, the poor relied upon the generosity of the wealthy for their healthcare at a time when poverty itself was seen as a sin, an act against God. These wealthy donors established and maintained hospitals, such as the Newcastle Infirmary, and were responsible for the governance, management and admission of patients. Their aim was to be seen to use resources efficiently and to treat the “deserving poor” to restore them to productive members of society. Throughout the century new buildings, medical advances and increasingly highly specialised staff had to be financed to cope with increasing demand. -

Hackworth Family Archive
Hackworth Family Archive A cataloguing project made possible by the National Cataloguing Grants Programme for Archives Science Museum Group 1 Description of Entire Archive: HACK (fonds level description) Title Hackworth Family Archive Fonds reference code GB 0756 HACK Dates 1810’s-1980’s Extent & Medium of the unit of the 1036 letters with accompanying letters and associated documents, 151 pieces of printed material and printed images, unit of description 13 volumes, 6 drawings, 4 large items Name of creator s Hackworth Family Administrative/Biographical Hackworth, Timothy (b 1786 – d 1850), Railway Engineer was an early railway pioneer who worked for the Stockton History and Darlington Railway Company and had his own engineering works Soho Works, in Shildon, County Durham. He married and had eight children and was a converted Wesleyan Methodist. He manufactured and designed locomotives and other engines and worked with other significant railway individuals of the time, for example George and Robert Stephenson. He was responsible for manufacturing the first locomotive for Russia and British North America. It has been debated historically up to the present day whether Hackworth gained enough recognition for his work. Proponents of Hackworth have suggested that he invented of the ‘blast pipe’ which led to the success of locomotives over other forms of rail transport. His sons other relatives went on to be engineers. His eldest son, John Wesley Hackworth did a lot of work to promote his fathers memory after he died. His daughters, friends, grandchildren, great-grandchildren and ancestors to this day have worked to try and gain him a prominent place in railway history. -
How to Find Us Please Note We Are in Hunslet, Not Middleton, Leeds the Railway Is Just Two Miles from the Centre of Leeds
The Middleton Railway How to find us Please note we are in Hunslet, not Middleton, Leeds The Railway is just two miles from the centre of Leeds. It was built as a colliery railway in 1758 Into Leeds on the M621 (south) from M1 (south) & requiring the first ever Railway Act of Parliament in order to M62 East From M1 follow “City” signs, leave M621 build it. Initially, carrying coals to the staithes near to the at Jct. 5 follow signs to the railway for a few river Aire, the motive power was horses. However, on the hundred yards. South out of Leeds on M621 & from 24th June 1812 Middleton became the first railway in the world to successfully employ steam locomotives M62 West Leave M621 at Jct. 6, at end of slip road commercially. They were designed by the Middleton go left, and next left, second exit at mini roundabout, colliery engineer John Blenkinsop, and built by Matthew we are a few hundred yards on left Murray at his Round Foundry in Holbeck, Leeds. Today the By Bus (Leeds City Centre) Railway runs from Moor Road Station to Park Halt on the From the Corn Exchange, Nos 12, 13 & 13A towards northern edges of Middleton Park, where evidence of the Middleton. Alight at the junction of Belle Isle Rd and early mining can be found in the form of old Bell Pits. Moor Rd, cross to Moor Rd and walk 10 mins almost Our building and trains are fully accessible, to the end, we are on the left with disabled parking spaces adjacent to the Check www.wymetro.com/bustravel/ building entrance. -

The Railway Revolution
Transactions – October 2019 North of England Institute of Mining and Mechanical Engineers Founded 1852 Royal Charter 1876 The Railway Revolution Les Turnbull BA MEd MNEIMME A joint lecture between NEIMME and the Stephenson Locomotive Society Les Turnbull is a modern historian who has worked as a schoolmaster, university lecturer and senior educational advisor. He has served as a volunteer and trustee at the Institute over the last two decades and is the author of several books on mining history. His latest book ‘The Railway Revolution’[1] has made a study of the transfer from road to rail transport in the seventeenth century which was the first railway revolution. Drawing primarily upon sources from the archives of the Institute and those of the Duke of Northumberland, he argues for a new interpretation of railway history and demonstrates that the first railway revolution occurred many years before the George and Robert Stephenson came on the scene; thereby revaluating what is usually regarded as the railway revolution of early Victorian times as in fact the second revolution. Copies of the book can be obtained from the Institute bookshop at: mininginstitute.org.uk The opening of the Stockton and Darlington Railway in 1825, followed by the building of the first inter-city railways between Liverpool and Manchester and London and Birmingham, earned George Stephenson the title of ‘father of the railways’. These events formed the basis of the traditional view that the railway revolution occurred in the mid nineteenth century which is embodied in the national curriculum of our schools and the national psyche of the country at large. -

Civilisation Module Transportation Revolution Innovations in Transportation 1. Turnpike Trusts at the End of the 17Th Century, B
Civilisation Module Second Year/ LMD [email protected] Transportation Revolution Innovations in Transportation 1. Turnpike Trusts At the end of the 17th century, British roads were in a terrible state. The rapid increase in industrial production between 1700 and 1750 resulted in the need for an improved transport system. Whenever possible, factory owners used Britain's network of rivers to transport their goods. However, their customers did not always live by rivers and they therefore had to make use of Britain's roads. This was a major problem for mine-owners as transport costs were crucial. If they could not get their coal to market at a competitive price, they were out of business. The appalling state of Britain's roads created serious problems for factory owners. Bad weather often made roads impassable. When fresh supplies of raw materials failed to arrive, factory production came to a cut. Flooded roads also meant that factory owners had difficulty transporting the finished goods to their customers. Merchants and factory owners appealed to Parliament for help. After much discussion it was decided that this problem would only be solved if road building could be made profitable. Groups of businessmen were therefore encouraged to form companies called Turnpike Trusts. These companies were granted permission by Parliament to build and maintain roads. So that they could make a profit from this venture, companies were allowed to charge people to use these roads. Between 1700 and 1750 Parliament established over 400 of these Turnpike companies. The quality of the roads built by these companies varied enormously. -

The Newcomen Society
The Newcomen Society for the history of engineering and technology Welcome! This Index to volumes 1 to 32 of Transactions of the Newcomen Society is freely available as a PDF file for you to print out, if you wish. If you have found this page through the search engines, and are looking for more information on a topic, please visit our online archive (http://www.newcomen.com/archive.htm). You can perform the same search there, browse through our research papers, and then download full copies if you wish. By scrolling down this document, you will get an idea of the subjects covered in Transactions (volumes dating from 1920 to 1960 only), and on which pages specific information is to be found. The most recent volumes can be ordered (in paperback form) from the Newcomen Society Office. If you would like to find out more about the Newcomen Society, please visit our main website: http://www.newcomen.com. The Index to Transactions (Please scroll down) GENERAL INDEX Advertising puffs of early patentees, VI, 78 TRANSACTIONS, VOLS. I-XXXII Aeolipyle. Notes on the aeolipyle and the Marquis of Worcester's engine, by C.F.D. Marshall, XXIII, 133-4; of Philo of 1920-1960 Byzantium, 2*; of Hero of Alexandria, 11; 45-58* XVI, 4-5*; XXX, 15, 20 An asterisk denotes an illustrated article Aerodynamical laboratory, founding of, XXVII, 3 Aborn and Jackson, wood screw factory of, XXII, 84 Aeronautics. Notes on Sir George Cayley as a pioneer of aeronautics, paper J.E. Acceleration, Leonardo's experiments with Hodgson, 111, 69-89*; early navigable falling bodies, XXVIII, 117; trials of the balloons, 73: Cayley's work on airships, 75- G.E.R. -

Newsletter 106
YAHS IHS Newsletter 106 YORKSHIRE ARCHAEOLOGICAL & HISTORICAL SOCIETY INDUSTRIAL HISTORY SECTION NEWSLETTER 106 SUMMER 2019 EDITORIAL Welcome to the latest Newsletter and it’s the end of another lecture season. It has been a difficult season for me due to my ill health lasting between mid-September and late January and being affected by the death of my close friend and fellow Section Officer Robert Vickers. I am hoping that the forthcoming season will be an improvement for me over the last. The Section AGM was held on 13 April with 18 members present, I chaired the meeting as the then Vice Chair and thanked those who had kept the Section going. I produced my last Annual Report for the Section and a copy is enclosed with this Newsletter. The meeting made the decision to move to a position of sending the Newsletter in future electronically to members where they have given their email addresses but to allow hard copies to be sent to the rest and on request. This is an attempt to cut down on the expense of producing the Newsletter which is an important benefit by keeping in touch with members but is our biggest item of expenditure. A suggestion was made that members receiving a hard copy should be asked to contribute towards the cost of production and postage but no decision was made on that aspect, we will wait to see how the initial change works out. This change will follow the approach taken by the main Society with its new members’ newsletter called Briefing which is primarily distributed electronically. -

Early Railway Locomotives
06 ililIililtililillllllllllll tt771 466tt3:s6062 ilil[ -., *- i@ : jl:-q ' e! 1. ' , ',i 58ii*s.i*::..r 1 'qffi Beamish }luseum'sPuffing Billy replica is the latest development in the expanding interest in early railways. The museum ts curator of transport PaulJarman discusses the earlvlocomotive lineage and suggests some further subjects for the replica treatment. ffing Billyis the mosr recent reconstruction in a growing lineage of locomotives dating back to Richard Tievithickt Coalbrookdale locomotive of 1 803. It wili almost certainly not be the last either, and it is the place ofrhis article to explore other worthy candidates from the annals ofwhat we might term 'early railway history', to about .:: 1j.ir .* 1850 when railway development and . ii-_t:. ,&!:: . :r4.''. locomotive science was both well established and increasingly sophisticated. \X/hile much interesr is currently being shown ':. :.. r' ,t,4ri:]lr,- in the 'nostalgic' replicas and reconsrrucrions, such as the ,A.1 Tornado, the Clan Hengist, F J, Counry Standard 3MT and Grange projects - which have primarily been conceived to resurrect Iost prototypes much loved and admired by enthusiasts in the inrer-war and post-\7orld\TarTwo periods (and there is absolutely nothing wrong with this) - there is a developing movement towards'reconstructive' replicas where the objective is to understand, ( learn from and interpret to the public the genesis, evolution and occasional demise of This colour engraving, from the bookCostume ofYorlishirepublished in 1813, and entitl ed. Tbe Collier steam locomotives that reach far back beyond depicts a miner in front ofa colliery scene that features one ofBlenkinsop's locomotives. Though the cog anyhuman memory. -

George Stephenson
George Stephenson Early Life. On the 9th June 1781 in a small stone labourer’s cottage in Wylam, a few miles west of Newcastle upon Tyne, George Stephenson was born. The cottage was called High Street House, its location being on the old road between Wylam and Newburn. Although it had four rooms the Stephenson family occupied a single ground floor room. The colliery waggonway ran past the front of the house so it must have been a noisy location. George was the second son and he was followed by a further two brothers and a sister, all born within a few years of each other. Their father Robert was a Scotsman and he was employed as engine fireman at the nearby Wylam Colliery. He earned 12 shillings (60p) a week so the family were not exactly well-off. His mother Mabel was born into a family who came from the nearby village of Ovingham where her father George Carr was a dyer. In his younger years George would be familiar with the comings and goings along the nearby waggonway and it is likely that he came to recognise the men and horses which pulled the coal chaldrons (wagons). He would also have visited the colliery on a number of occasions even if it was only to take his father’s lunch bait (sandwiches). On the way to the colliery he would have passed another small cottage, the home of the Hackworth family, near to the colliery workshops. It was here that John Hackworth the foreman colliery blacksmith worked. It was in this small cottage that his son Timothy was born in December 1786 and it is remarkable how the lives of both George and Timothy would in later years become intertwined in the construction of locomotives. -
Where Railways Were Born
WHERE RAILWAYS WERE BORN The Story of Wylam and its railway pioneers Philip.R.B.Brooks Wylam Parish Council First published in 1975 under the title “Wylam and its Railway Pioneers”. Revised edition published as “Where Railways were born” in 1979, with minor revisions in 2003. © Philip R. B. Brooks 1975, 1979, 2003. ISBN 0 9504646 2 7 The author and publishers wish to thank all that have assisted in the production of this book. Contents Eighteenth Century Beginnings – Construction of Colliery Waggonways 3 Early Years of the Wylam Engineers 4 The First Locomotives 5 The Stockton and Darlington Railway 9 The Rainhill Trails of 1829 10 Newcastle to Carlisle – The First Railway to cross Britain 11 Wylam Ironworks Locomotives 13 Achievements of the Local Pioneers 14 Industrial Decline 17 The Scotswood, Newburn and Wylam Railway 17 1 A Century of Change 19 Bibliography 21 Events in Local and National Railway History 22 An Epitaph to Steam 24 Preface If the Northumberland village of Wylam is known outside the North East of England it is almost certainly because it was the birth-place of George Stephenson, the “Father of Railway”. Although “Wylam Geordie” – as Stephenson was affectionately know on Tyneside – is undoubtedly Wylam’s most famous “son”, several other important early railway pioneers have lived and also worked in the village, which was the scene of historic experiments with locomotives early in the 19th century. The major contribution which Wylam and its engineers made to the history of railways and the development of steam locomotives has not always been recognised. -
Key Dates in the History of Britain's Railway
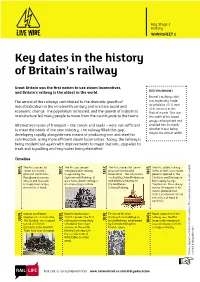
Key Stage 2 History WORKSHEET 1 Key dates in the history of Britain’s railway Great Britain was the first nation to use steam locomotives, and Britain’s railway is the oldest in the world. DID YOU KNOW? Brunel’s walking stick The arrival of the railways contributed to the dramatic growth of was especially made industrialisation in the nineteenth century and massive social and to unfold to 7ft ¼ inch (2.14 metres) at the economic change. The population increased, and the growth of industrial flick of a wrist. This was manufacture led many people to move from the countryside to the towns. the width of his broad gauge railway track and Alternative means of transport – the canals and roads – were not sufficient enabled him to check to meet the needs of the new industry. The railway filled this gap, whether it was being developing rapidly alongside new means of producing iron and steel for dug to the correct width. construction, using more efficient steam locomotives. Today, the railway is being modernised again with improvements to major stations, upgrades to track and signalling and key routes being electrified. Timeline The first successful The first passenger- The first successful steam The first public railway steam locomotive carrying public railway powered commercial in the world to use steam 1812 1825 1804 (Richard Trevithick’s 1807 is opened by the locomotive – the Salamanca power is opened at the Penydarren) runs on Oystermouth Railway. It – is built by John Blenkinsop Stockton and Darlington wheels and is used to uses horse drawn carriages and Matthew Murray for Railroad by George transport iron across on an existing tramline.