Sea Ice Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rapid Access Ice Drill: a New Tool for Exploration of the Deep Antarctic Ice Sheets and Subglacial Geology
Journal of Glaciology (2016), Page 1 of 16 doi: 10.1017/jog.2016.97 © The Author(s) 2016. This is an Open Access article, distributed under the terms of the Creative Commons Attribution licence (http://creativecommons. org/licenses/by/4.0/), which permits unrestricted re-use, distribution, and reproduction in any medium, provided the original work is properly cited. Rapid Access Ice Drill: a new tool for exploration of the deep Antarctic ice sheets and subglacial geology JOHN W. GOODGE,1 JEFFREY P. SEVERINGHAUS2 1Department of Earth and Environmental Sciences, University of Minnesota, Duluth, MN 55812, USA 2Scripps Institution of Oceanography, UC San Diego, La Jolla, CA 92093, USA Correspondence: John W. Goodge <[email protected]> ABSTRACT. A new Rapid Access Ice Drill (RAID) will penetrate the Antarctic ice sheets in order to create borehole observatories and take cores in deep ice, the glacial bed and bedrock below. RAID is a mobile drilling system to make multiple long, narrow boreholes in a single field season in Antarctica. RAID is based on a mineral exploration-type rotary rock-coring system using threaded drill pipe to cut through ice using reverse circulation of a non-freezing fluid for pressure-compensation, maintenance of temperature and removal of ice cuttings. Near the bottom of the ice sheet, a wireline latching assem- bly will enable rapid coring of ice, the glacial bed and bedrock below. Once complete, boreholes will be kept open with fluid, capped and available for future down-hole measurement of temperature gradient, heat flow, ice chronology and ice deformation. RAID is designed to penetrate up to 3300 m of ice and take cores in <200 hours, allowing completion of a borehole and coring in ∼10 d at each site. -

Ice Core Science
PAGES International Project Offi ce Sulgeneckstrasse 38 3007 Bern Switzerland Tel: +41 31 312 31 33 Fax: +41 31 312 31 68 [email protected] Text Editing: Leah Christen News Layout: Christoph Kull Hubertus Fischer, Christoph Kull and Circulation: 4000 Thorsten Kiefer, Editors VOL.14, N°1 – APRIL 2006 Ice Core Science Ice cores provide unique high-resolution records of past climate and atmospheric composition. Naturally, the study area of ice core science is biased towards the polar regions but ice cores can also be retrieved from high .pages-igbp.org altitude glaciers. On the satellite picture are those ice cores covered in this issue of PAGES News (Modifi ed image of “The Blue Marble” (http://earthobservatory.nasa.gov) provided by kk+w - digital cartography, Kiel, Germany; Photos by PNRA/EPICA, H. Oerter, V. Lipenkov, J. Freitag, Y. Fujii, P. Ginot) www Contents 2 Announcements - Editorial: The future of ice core research - Dating of ice cores - Inside PAGES - Coastal ice cores - Antarctica - New on the bookshelf - WAIS Divide ice core - Antarctica - Tales from the fi eld - ITASE project - Antarctica - In memory of Nick Shackleton - New Dome Fuji ice core - Antarctica - Vostok ice drilling project - Antarctica 6 Program News - EPICA ice cores - Antarctica - The IPICS Initiative - 425-year precipitation history from Italy - New sea-fl oor drilling equipment - Sea-level changes: Black and Caspian Seas - Relaunch of the PAGES Databoard - Quaternary climate change in Arabia 12 National Page 40 Workshop Reports - Chile - 2nd Southern Deserts Conference - Chile - Climate change and tree rings - Russia 13 Science Highlights - Global climate during MIS 11 - Greece - NGT and PARCA ice cores - Greenland - NorthGRIP ice core - Greenland 44 Last Page - Reconstructions from Alpine ice cores - Calendar - Tropical ice cores from the Andes - PAGES Guest Scientist Program ISSN 1563–0803 The PAGES International Project Offi ce and its publications are supported by the Swiss and US National Science Foundations and NOAA. -

Lakes in Winter
NORTH AMERICAN LAKE NONPROFIT ORG. MANAGEMENT SOCIETY US POSTAGE 1315 E. Tenth Street PAID Bloomington, IN 47405-1701 Bloomington, IN Permit No. 171 Lakes in Winter in Lakes L L INE Volume 34, No. 4 • Winter 2014 Winter • 4 No. 34, Volume AKE A publication of the North American Lake Management Society Society Management Lake American North the of publication A AKE INE Contents L L Published quarterly by the North American Lake Management Society (NALMS) as a medium for exchange and communication among all those Volume 34, No. 4 / Winter 2014 interested in lake management. Points of view expressed and products advertised herein do not necessarily reflect the views or policies of NALMS or its Affiliates. Mention of trade names and commercial products shall not constitute 4 From the Editor an endorsement of their use. All rights reserved. Standard postage is paid at Bloomington, IN and From the President additional mailing offices. 5 NALMS Officers 6 NALMS 2014 Symposium Highlights President 11 2014 NALMS Awards Reed Green Immediate Past-President 15 2014 NALMS Photo Contest Winners Terry McNabb President-Elect 16 2014 NALMS Election Results Julie Chambers Secretary Sara Peel Lakes in Winter Treasurer Michael Perry 18 Lake Ice: Winter, Beauty, Value, Changes, and a Threatened NALMS Regional Directors Future Region 1 Wendy Gendron 28 Fish in Winter – Changes in Latitudes, Changes in Attitudes Region 2 Chris Mikolajczyk Region 3 Imad Hannoun Region 4 Jason Yarbrough 32 A Winter’s Tale: Aquatic Plants Under Ice Region 5 Melissa Clark Region 6 Julie Chambers 38 A Winter Wonderland . of Algae Region 7 George Antoniou Region 8 Craig Wolf 44 Water Monitoring Region 9 Todd Tietjen Region 10 Frank Wilhelm 48 Winter Time Fishery at Lake Pyhäjärvi Region 11 Anna DeSellas Region 12 Ron Zurawell At-Large Nicki Bellezza Student At-Large Ted Harris 51 Literature Search LakeLine Staff Editor: William W. -

Mountain Springs (1890-1948)
Mountain Springs (1890-1948) The Early Years Bowmans Creek for the Lehigh Valley Railroad. Apparently, Splash Dam No. 1 was used as a splash dam at least through 1895, but it was not suc- The ice industry at Mountain Springs may not have been intentionally cessful. The fall in the creek was too steep and the twisting creek bed designed. Harveys Lake would have been the natural site for a major ice caused the released water to rush ahead of the logs, and too often the industry, but the Wright and Barnum patents to the lake discouraged its logs became stranded along the shore instead of being carried down- development. Indeed, Splash Dam No. 1 at Bean Run was developed by stream to the mill. Albert Lewis, not for the ice industry, but as an extension of his lumber With the completion and sale by Lewis to the Lehigh Valley of the rail- industry at Stull downstream on Bowmans Creek. road along the creek in 1893, a splash dam was not critical to carry the In October 1890, the Albert Lewis Lumber and Manufacturing logs to mill. His company ran log railroad lines into the forest lands to Company began construction of a log and timber dam on Bowmans haul timber to the Lehigh Valley line and then down to Stull. Lewis then Creek, near Bean Run, a small stream which runs into the creek. The ini- converted Splash Dam No. 1 to icecutting in the mid-1890s, an industry tial dam site was a failure; the creek bed was too soft to support a dam. -

Ice Cutting at Bantam Lake N
Ice House Ruins Tour Map Follow the Lake Trail (L = yellow blaze) Round trip ~ 1 mile Ice Cutting at Bantam Lake Berkshire Ice Company 1908-1927 Museum and Parking Lot Southern New England Ice Company 1927-1929 Lake Trail 8 6 7 5 4 3 2 1 Before the advent of the refrigerator, people kept food from spoiling by placing it in an icebox—a wooden cabinet with shelves for perishables and a large compartment for a block N of ice to keep everything cold. Where did this ice come Bantam Lake from? It was cut from lakes and ponds in the winter in re- gions where the temperatures were below freezing for ex- tended periods of time. Ice blocks were cut by farmers for Photos are courtesy of the Morris Historical Society and the family use and by crews employed by large commercial Bantam Historical Society with special thanks to Lee Swift and concerns. Both occurred at Bantam Lake. The commercial Betsy Antonucci. operation was centered on the north shore and involved White Memorial Foundation one of the largest ice block storage facilities in southern 71 Whitehall Road, P.O. Box 368 New England. The company even had railroad service Litchfield, CT 06763 making the distribution of ice to distant cities possible. (860) 567-0857 www.whitememorialcc.org 2014 West side of ice house showing box car and men shoveling snow from the tracks 8. The railroad line – This spur (now the beginning of the Butter- nut Brook Trail) led out to the main line of the Shepaug Railroad near the Lake Station. -

Student Journal Pages
♦ Caring ♦ Community ♦ Diversity ♦ Honesty ♦ Inclusiveness ♦ Respect ♦ Responsibility ♦ Stewardship ♦ Caring ♦ C ommunity Inclusiveness ♦ ♦ Diversity Honesty ♦ ♦ Honesty Honesty versity MY FROST Di ♦ ♦ VALLEY YMCA Inclusiveness Community ♦ ♦ JOURNAL Respect Caring ♦ ♦ Name: ______________________________ Responsibility Stewardship ♦ School: _____________________________ ♦ Stewardship Dates: ______________________________ Responsibility ♦ ♦ Caring Respect Respect ♦ ♦ Community Inclusiveness ♦ ♦ Diversity Honesty Honesty ♦ ♦ Honesty Diversity ♦ ♦ Inclusiveness Community Community ♦ Caring ♦ Community ♦ Diversity ♦ Honesty ♦ Inclusiveness ♦ Respect ♦ Responsibility ♦ Stewardship ♦ Caring ♦ ♦ Caring ♦ Community ♦ Diversity ♦ Honesty ♦ Inclusiveness ♦ Respect ♦ Responsibility ♦ Stewardship ♦ Caring ♦ Community FROST VALLEY YMCA Inclusiveness ♦ ♦ School Journal Diversity Honesty ♦ ♦ WORD FIND PUZZLE Honesty Diversity ♦ ♦ S S M N R I C S Y A L N C T L O P Y Y U T R S B U R U E U A T A S T D E S S E R T T I M E T I E Inclusiveness O U C F S Y T I T Y O T C J O I I S E S G S O O S L Y S H T C N P E V F S G N L B R Y C L S R T E S R R Y R E O N I S T R U I S R E T L M E T I Community ♦ I D F N A T P T M T E A M B U I L D I N G R S T ♦ M V C A E O S N B P M M I S O L L K S T E I D T Respect O Y E I M E E E T I O S Y T A O S O R T O M V N Caring D L P T A D R C N C N S Y V I T I O E R O C T C ♦ G B J U L I U S F O R S T M A N N E V A N E N I ♦ U R V E R W T N P D H S I C C U E S I S A T E E Responsibility A S N V P R N S E I O S Y L M A R O D C V -
Regelation: Why Does Ice Melt Under Pressure?
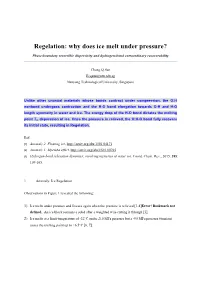
Regelation: why does ice melt under pressure? Phase-boundary reversible dispersivity and hydrogen-bond extraordinary recoverability Chang Q Sun [email protected] Nanyang Technological University, Singapore Unlike other unusual materials whose bonds contract under compression, the O:H nonbond undergoes contraction and the H-O bond elongation towards O:H and H-O length symmetry in water and ice. The energy drop of the H-O bond dictates the melting point Tm depression of ice. Once the pressure is relieved, the O:H-O bond fully recovers its initial state, resulting in Regelation. Ref: [1] Anomaly 2: Floating ice, http://arxiv.org/abs/1501.04171 [2] Anomaly 1: Mpemba effect, http://arxiv.org/abs/1501.00765 [3] Hydrogen-bond relaxation dynamics: resolving mysteries of water ice. Coord. Chem. Rev., 2015. 285: 109-165. 1 Anomaly: Ice Regelation Observations in Figure 1 revealed the following: 1) Ice melts under pressure and freezes again when the pressure is relieved [1-4]Error! Bookmark not defined.. An ice block remains a solid after a weighted wire cutting it through [5]. 2) Ice melts at a limit temperature of -22C under 210 MPa pressure but a -95 MPa pressure (tension) raises the melting point up to +6.5C [6, 7]. a b 280 270 (K) Quasi-solid Liquid m T 260 V pdvH TP() V C 110 TPCH()00 E 250 -100 -50 0 50 100 150 200 P(MPa) Figure 1 Regelation of ice. (a) A weighted wire cuts a block of ice through without severing it [5]. (b) Theoretical formulation [8] of the pressure dependence of the ice melting temperature Tm(P) or the phase boundary between the liquid and quasi-solid [6, 7] indicates that the H-O bond energy relaxation dictates the Tm(P). -

Boating Regs
CHAPTER 8 RECREATON, BOATING AND SWIMMING 8.01 Intent 8.02 Applicability and Enforcement 8.03 Adoption of State Boating and Safety Laws 8.04 Boating Regulations 8.05 Hours of Operation 8.06 Swimming Regulated 8.07 Water Skiing Regulation 8.08 Ramp Prohibited 8.09 Littering Prohibited 8.10 Possession of Glass Prohibited 8.11 Seaplane Landings Prohibited 8.12 Conduct at Public Access Sites 8.13 Uniform Aids to Navigation: Waterway Markers 8.14 Water Regulations for Icebound Lakes 8.30 Penalty 8.01 Intent The intent of this ordinance is to provide safe and healthful conditions for the enjoyment of aquatic recreation consistent with public rights and interest and the capability of the water resource. 8.02 Applicability and Enforcement The provisions of this ordinance shall apply to the Waters of Long (Kee-Nong-Go-Mong) Lake, Waubeesee Lake, Wind Lake, the Muskego Channel, the Wind Lake Channel, and the Anderson Channel within the jurisdiction of the Town of Norway. The provisions of this Ordinance shall be enforced by the Officers of the Town of Norway Lake Patrol. 8.03 Adoption of State Boating and Safety Laws Sections 30.50 through 30.71, Wis. Stats., as amended from time to time, exclusive of penalty provisions are adopted and incorporated herein by reference as though fully set forth herein ORD. 92-1 (1/13/92) 8.04 Boating Regulations 1. Speed A. No person shall operate a motorboat at a speed greater than is reasonable and prudent under the conditions and having regard for the actual and potential hazards then existing. -

Multi-Agent Simulation of Iceberg Mass Loss During Its Energy-Efficient Towing for Freshwater Supply
energies Article Multi-Agent Simulation of Iceberg Mass Loss during Its Energy-Efficient Towing for Freshwater Supply Sergiy Filin 1, Iouri Semenov 2 and Ludmiła Filina-Dawidowicz 1,* 1 Faculty of Maritime Technology and Transport, West Pomeranian University of Technology in Szczecin, Ave. Piastów 41, 71-065 Szczecin, Poland; sergiy.fi[email protected] 2 WSB University in Pozna´n,Str. Powsta´nców Wielkopolskich 5, 61-895 Pozna´n,Poland; [email protected] * Correspondence: ludmila.fi[email protected]; Tel.: +48-914-494-005 Abstract: The problem of freshwater deficit in the last decade has progressed, not only in Africa or Asia, but also in European countries. One of the possible solutions is to obtain freshwater from drifting icebergs. The towing of large icebergs is the topic analyzed in various freshwater supply projects conducted in different zone-specific regions of the world. These projects show general effects of iceberg transport efficiency but do not present a detailed methodology for the calculation of their mass losses. The aim of this article is to develop the methodology to calculate the mass losses of icebergs transported on a selected route. A multi-agent simulation was used, and the numerical model to estimate the melting rate of the iceberg during its energy-efficient towing was developed. Moreover, the effect of towing speed on the iceberg’s mass loss was determined. It was stated that the maximum use of ocean currents, despite longer route and increased transport time, allows for energy-efficient transport of the iceberg. The optimal towing speed of the iceberg on the selected route was recommended at the range of 0.4–1 m/s. -
Ice Mitigation Measures Used During the Construction of the Keeyask Generating Station After the Failure of the Ice Boom
CGU HS Committee on River Ice Processes and the Environment 19th Workshop on the Hydraulics of Ice Covered Rivers Whitehorse, Yukon, Canada, July 9-12, 2017. Ice Mitigation Measures Used During the Construction of the Keeyask Generating Station after the Failure of the Ice Boom Michael Morris, P.Eng , Jarrod Malenchak, P.Eng. Manitoba Hydro, 360 Portage Ave, Winnipeg, MB R3C 0G8 [email protected]; [email protected] An ice boom was installed upstream of Gull Rapids on the Nelson River in northern Manitoba to minimize the volume of ice that could be transported and deposited at the Keeyask Generating Station construction site. With lower expected ice volumes associated with the ice boom, the expected water level staging at the construction site was significantly reduced, allowing for the construction of lower cofferdam crests. After the ice boom failed, water levels began to rise, resulting in the imminent danger of the cofferdams overtopping and a significant risk of damages and costly schedule delays. This paper describes the mitigation measures that were used to reduce the risk of overtopping the cofferdams. The mitigation measures employed can be classified as structural (cofferdam top-up, groin extensions), operational (lowering of water level in downstream reservoir) and on-ice measures (cutting upstream border ice to form an ice bridge). 1. Introduction Manitoba Hydro and four Cree Nations known collectively as the partner First Nations: Tataskweyak Cree Nation and War Lake First Nation (working together as the Cree Nation Partners); Fox Lake Cree Nation and York Factory First Nation have formed the Keeyask Hydropower Limited Partnership (KHLP) to design, construct and operate the Keeyask Generating Station. -

Ice Harvests Permitted Many Farmers to Earn This Extra Income
I-IIST Ref Knapp. Verne 9 74 The natural ~cehanvest 523 c7f Xlonroe Countv. Zast Stroudsburg State College THZ NATURAL ICE HARYESTSS OF RONROE COUNTY PENNSYLVANIA by Vertie Knapp Local History Eastern Monroe Public Library 1002 N. Ninth St. Stroudsburg, PA 18360 (717) 421 -2800 TABLE OF COKTEMTS INTRODUCTIONoooooooooooooooooooooooooo~oooooooooooooooo 1 ICE FOX LOCAL USEa~aaaraaarraaraaaaaaaaaaaaaaaaaaaaaaaaaa 3 THE BIG ICS CO!~PAN~S........~ooooo~o~~~~~o~~~~~~~~~~o~~~6 IC? HARVESTING EY TIE URGE COIiiPANISSo a 12 IKFACT ON TIE COUNTY OF THE ICE INDUSTRY, 16 SZLZCTZD BIBLIOG~PHYooooooooooaoooooooooooooooooooooooo 17 INTRODUCTION For many yenro boforo electric refrigeration came to bo :\I\ IICCO1) 18nd 1wt1ml of Itoopln~food cold , pooplo rallod on 1co to do :KO. ll'hio LCO cam from ponds, lakes and rivcro. I-t wnc cut in the winter and stored for summer use. As cities grew in size, they had to get their ice from farther and farther away. In the 1890's the Focono iiountains, with a never-failing supply of clean water, became an important source of ice for Philadelphia, New York and the cities of I\.'ew Jersey. The rail- roads that were built to carry coal from Kortheastern Pennsylvania provided transportation for the ice. Consequently, a large industry grew up in Konroe County to karvest the ice and dis- tribu~teit to the cities. In 1901, a ha.rvest of 500,000 tons was expected in the Poconos. In 1911, 1,500,000 tons were harvested in the Pocono Xountains and vicinity..1 Besides this great industry, local men harvested ice on snall~rponds near Stroudsburg,- 3ast Stroudsburg and Cresco to be sold locally. -

Airfields on Antarctic Glacierice
AD-A217 638 ©2E[2 EL DI FILCOPYM US Army Corps 89-w21 of Engineers REPORT Cold Regions Research & Engineering Laboratory Airfields on Antarctic glacierice Vu., vA2 2~ FEB 0C DLSPM ONSAEM-T r it Cover: Blue ice areas near the Scott Glacier. There is a possible landing field at 86035"S, 148025"W (5600 ft-or 1700 m-a.s.L ), but approaches are obstructed by mountains on thrae sides. CRREL Report 89-21 December 1989 Airfields on Antarctic glacier ice Malcolm Mellor and Charles Swithinbank Prepared for DIVISION OF POLAR PROGRAMS NATIONAL SCIENCE FOUNDATION 2 0 Approved for public release: distribution is unlimited. 9 0 u UNCLASSIFIED S ccuRvfc CAIION OF Tits PAGE REPORT DOCUMENTATION PAGE O O.o-'W.o U _ __ _ _ _ __ _ _ _ _ _ _ __ _ _ __ __ _ ___ __ _ _ _ _Emo Oote:.A 3u0. Q66 loo REPORT.S nCU ,.WC ,WAN IS.RESTICITV Aft.G,,.S Unclassified 20. SECURi 1Y CLA$CAWIN AWHORAY 3, M~IM OUIIONIAVAJ1AMUIY0F REPOill 1,rApproved for public release; 2. oowN-o SCHE distribution Wunlimited. 4, PROnMN4 GaWWJAI*. REPORT NUMER 5, MOM= O O%;,%A N EEPORI T'VS18EINS) CRREL Report $9-21 60, NAMIE OF PEAF0CRM4.G 0WANZATA' 6b. OfF)EVL 7o. NAME OF MONM1OR'.NG OW~AINVUA U.S. Army Cold Regions Research (ioprcob.) National Science Foundation and Engineering Laboratory CECRL Division of Polar Programs on4PSS(5V.?WFWCo**) 70. AOESS CC-) $1-04. andZP COO#.) 72 Lyme Road 1800 G St., NW Hanover, N.H.03755-1290 Washington, D.C.20550 Go.