The Amphitheatre of Carnuntum – Towards a Complete 3D Model Using Airborne Structure from Motion and Dense Image Matching
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bullard Eva 2013 MA.Pdf
Marcomannia in the making. by Eva Bullard BA, University of Victoria, 2008 A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of MASTER OF ARTS in the Department of Greek and Roman Studies Eva Bullard 2013 University of Victoria All rights reserved. This thesis may not be reproduced in whole or in part, by photocopy or other means, without the permission of the author. ii Supervisory Committee Marcomannia in the making by Eva Bullard BA, University of Victoria, 2008 Supervisory Committee Dr. John P. Oleson, Department of Greek and Roman Studies Supervisor Dr. Gregory D. Rowe, Department of Greek and Roman Studies Departmental Member iii Abstract Supervisory Committee John P. Oleson, Department of Greek and Roman Studies Supervisor Dr. Gregory D. Rowe, Department of Greek and Roman Studies Departmental Member During the last stages of the Marcommani Wars in the late second century A.D., Roman literary sources recorded that the Roman emperor Marcus Aurelius was planning to annex the Germanic territory of the Marcomannic and Quadic tribes. This work will propose that Marcus Aurelius was going to create a province called Marcomannia. The thesis will be supported by archaeological data originating from excavations in the Roman installation at Mušov, Moravia, Czech Republic. The investigation will examine the history of the non-Roman region beyond the northern Danubian frontier, the character of Roman occupation and creation of other Roman provinces on the Danube, and consult primary sources and modern research on the topic of Roman expansion and empire building during the principate. iv Table of Contents Supervisory Committee ..................................................................................................... -
Arcana Mundi : Magic and the Occult in the Greek and Roman Worlds : a Collection of Ancient Texts / Translated, Annotated, and Introduced by Georg Luck
o`o`o`o`o`o SECOND EDITION Arcana Mundi MAGIC AND THE OCCULT IN THE GREEK AND ROMAN WORLDS A Collection of Ancient Texts Translated, Annotated, and Introduced by Georg Luck o`o`o`o`o`o THE JOHNS HOPKINS UNIVERSITY PRESS BALTIMORE The first edition of this book was brought to publication with the generous assistance of the David M. Robinson Fund and the Andrew W. Mellon Foundation. ∫ 1985, 2006 The Johns Hopkins University Press All rights reserved. Published 1985, 2006 Printed in the United States of America on acid-free paper 2 4 6 8 9 7 5 3 1 The Johns Hopkins University Press 2715 North Charles Street Baltimore, Maryland 21218-4363 www.press.jhu.edu Library of Congress Cataloging-in-Publication Data Arcana mundi : magic and the occult in the Greek and Roman worlds : a collection of ancient texts / translated, annotated, and introduced by Georg Luck. — 2nd ed. p. cm. Includes bibliographical references (p. ) and indexes. isbn 0-8018-8345-8 (hardcover : alk. paper) isbn 0-8018-8346-6 (pbk. : alk. paper) 1. Occultism—Greece—History—Sources. 2. Occultism—Rome—History— Sources. 3. Civilization, Classical—Sources. I. Luck, Georg, 1926– bf1421.a73 2006 130.938—dc22 2005028354 A catalog record for this book is available from the British Library. For Harriet This page intentionally left blank Contents List of Texts ix Preface xiii List of Abbreviations xvii General Introduction: Exploring Ancient Magic 1 I. MAGIC Introduction 33 Texts 93 II. MIRACLES Introduction 177 Texts 185 III. DAEMONOLOGY Introduction 207 Texts 223 IV. DIVINATION Introduction 285 Texts 321 V. -

Harttimo 1.Pdf
Beyond the River, under the Eye of Rome Ethnographic Landscapes, Imperial Frontiers, and the Shaping of a Danubian Borderland by Timothy Campbell Hart A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Greek and Roman History) in the University of Michigan 2017 Doctoral Committee: Professor David S. Potter, Co-Chair Professor Emeritus Raymond H. Van Dam, Co-Chair Assistant Professor Ian David Fielding Professor Christopher John Ratté © Timothy Campbell Hart [email protected] ORCID iD: 0000-0002-8640-131X For my family ii ACKNOWLEDGEMENTS Developing and writing a dissertation can, at times, seem like a solo battle, but in my case, at least, this was far from the truth. I could not have completed this project without the advice and support of many individuals, most crucially, my dissertation co-chairs David S. Potter, and Raymond Van Dam. Ray saw some glimmer of potential in me and worked to foster it from the moment I arrived at Michigan. I am truly thankful for his support throughout the years and constant advice on both academic and institutional matters. In particular, our conversations about demographics and the movement of people in the ancient world were crucial to the genesis of this project. Throughout the writing process, Ray’s firm encouragement towards clarity of argument and style, while not always what I wanted to hear, have done much to make this a stronger dissertation. David Potter has provided me with a lofty academic model towards which to strive. I admire the breadth and depth of his scholarship; working and teaching with him have shown me much worth emulating. -

Roman Legions: a Page of the Roman Numismatic Gallery (
Roman Legions: A Page of the Roman Numismatic Gallery (www.romancoins.info) Legion Caesar Augustus Tiberius Claudius Nero Vespasian Domitian Trajan Hadrian M. Aurel SepSev 300 AD I Adiutrix . Misenium 68 Mogontiacum Mogontiacu Brigetio 97 Brigetio Brigetio Brigetio Brigetio Galba 69/70 m 85 Dacia Camp (Otho) Sirmium 89 Parthia Bodriacum ? bis 97 Camp 114-6 I Augusta Hispania Col Agrippi Bonna Bonna 69/70 Germanica Gallia 19 BC - 16 Col Agrippina (Germanicus 9 AD - Bonna 16 - I Italica 66 Gallia Novae 69 Novae Novae Novae Novae Novae Novae Cisalp Dcia Camp 68 Lugdunum (Vitellius) I Minerva Bonna 82 Moesien Bonna Bonna -161 Bonna Bonna Dacia Camp Orient 161- Bonna 105 166 Bonna 167- I Parthica Singara (Mesopotam) II Adiutrix 69 Ravenna Deva Dacia Aquincum Aquincum Aquincum Aquincum Noviomagus -86/88 101-106 70 Singidunum Aquincum Orient 161- Lindum (Brit) 87-89 106 166 70/71-78 Aquincum 89 II Augusta 43 BC 17 Britannia 43 Glevum Glevum Isca Isca Isca Isca Isca Isca CVibius Pansa Argentorate (Vespasianus) (Gloucester) -75 (Caerleon) (Caerleon) (Caerleon) (Caerleon) (Caerleon) (Caerleon) 30 BC (Germanicus 67- 75 - Hispania T 9AD Rhein II Italica Aquilea 165 Lauriacum Lauriacum Locica 170-2 Albing 172-2 Lauriacum 205 II Parthica 197 Alba 202 Alba (Rom) Parther (Caracalla) II Traiana 105 125 Nicopolis Nicopolis Nicopolis Laodicea Nicopolis Legion Caesar Augustus Tiberius Claudius Nero Vespasian Domitian Trajan Hadrian M. Aurel SepSev 300 AD 114-116 (Aegypten) Parther 117 Judea (Ägypten) III Augusta 43 BC Ammaedra Ammaedra Ammaedra Ammaedra -

Roman Art from the Louvre
Roman Art from the Louvre Resource for Educators American Federation of Arts Roman Art from the Louvre Resource for Educators American Federation of Arts Roman Art from the Louvre is organized by the American Federation of Arts and the Musée du Louvre. The exhibition is supported by an indemnity American Federation of Arts 305 East 47th Street, 10th floor from the Federal Council on the Arts and the Humanities. New York, NY 10017 212.988.7700 The AFA is a nonprofit institution that organizes art exhibitions for presen- www.afaweb.org tation in museums around the world, publishes scholarly exhibition cata- logues, and develops educational materials and programs. © 2007 American Federation of Arts All materials included in this resource may be reproduced for educational purposes. Please direct questions about this resource to: Suzanne Elder Burke Director of Education American Federation of Arts 212.988.7700 x226 [email protected] Exhibition Itinerary Indianapolis Museum of Art September 23, 2007–January 6, 2008 Seattle Art Museum February 21–May 11, 2008 Oklahoma City Museum of Art June 19–October 12, 2008 Design/Production: Emily Lessard Front cover: Fragment of a Relief of a Double Suovetaurilia Sacrifice (detail), 1st or 2nd quarter of 1st century A.D. (no. 4) Back cover: Knife Handle in the Shape of a Thracian Gladiator, 2nd half of 1st century A.D. (no. 6) CONTENTS About This Resource 4 Exhibition Overview 5 Ancient Roman Society 6 History of Ancient Rome Government—The Emperor and the Senate Citizenship Non-Citizens—Foreigners, Slaves, and Freedmen Leisure 10 The Baths Roman Theater Circus Maximus The Amphitheater Religion 11 Guide to Roman Gods and Goddesses 13 Guide to Roman Vessel Forms 16 Interesting Facts about Ancient Rome 18 Selected Works of Art 19 1. -

The Roman City Carnuntum
Press information The Roman City Carnuntum History Tiberius, who later became Emperor, erected a winter camp in the Carnuntum area in the year 6 AD. This was the beginning of 400 years of Roman presence in Carnuntum. Under Emperor Claudius a military camp was erected around the year 54 AD where today’s market town of Bad Deutsch- Altenburg is situated, which is where the city of Carnuntum originated. A civilian settlement, the so- called canabae legionis, grew up around the military camp and together they formed the military city. Towards the end of the 1st century AD a civilian settlement came into being in today’s town of Petronell-Carnuntum, which later became the civilian city of Carnuntum. This was not under military command but had its own civilian administration. Around the year 124 AD Carnuntum became a municipality under Emperor Hadrian and was known as Municipium Aelium Karnuntum. At this time the province of Pannonia was reorganized into Upper Pannonia (pannonia superior) and Lower Pannonia (pannonia inferior). Carnuntum became the capital of the province of Upper Pannonia and the seat of the governor. Emperor Marcus Aurelius conducted the campaign against the Marcomanni in Carnuntum during the years 171-173 AD and it has been verified that he wrote the second book of his famous “Meditations” here. In the year 193 AD the then ruling governor Septimius Severus was proclaimed emperor by his troops in Carnuntum, and he then raised Carnuntum to the status of a colonia (Colonia Septimia Aurelia Antoniniana Karnuntum). Carnuntum reached its greatest expansion at the end of the 2nd, beginning of the 3rd century, covering an area of some 10 sq. -
Carnuntum Augmented Reality Mobile Application
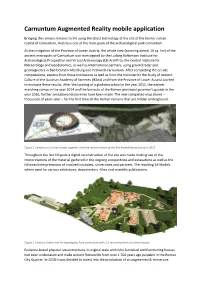
Carnuntum Augmented Reality mobile application Bringing the romans remains to life using the latest technology at the site of the former roman capital of Carnuntum, Austria is one of the main goals of the archaeological park carnuntum. At the instigation of the Province of Lower Austria, the whole area (covering almost 10 sq. km) of the ancient metropolis of Carnuntum was investigated by the Ludwig Boltzmann Institute for Archaeological Prospection and Virtual Archaeology (LBI ArchPro), the Central Institute for Meteorology and Geodynamics, as well as international partners, using ground radar and geomagnetics in Bad Deutsch-Altenburg and Petronell-Carnuntum. After completing the on-site computations, experts from these institutions as well as from the Institute for the Study of Ancient Culture of the Austrian Academy of Sciences (IKAnt) and from the Province of Lower Austria worked to evaluate these results. After the locating of a gladiator school in the year 2011, the earliest marching camps in the year 2014 and the barracks of the Roman provincial governor's guards in the year 2016, further sensational discoveries have been made. The new completed map shows – thousands of years later – for the first time all the Roman remains that are hidden underground. Figure 1 Geophysical Survey results together with the interpretation of the 3rd Amphitheatre found in 2017 Throughout the last 10 years a digital reconstruction of the site was made making use of the interpretations of the material gathered in the ongoing prospections and excavations as well as the followed interpretations of involved institutes, universities and partners. The resulting 3d Models where used for various exhibitions, documentary -films and scientific publications. -

The City Map of Ancient Carnuntum – Combining Archaeological Prospection, Photogrammetry and Gis
THE CITY MAP OF ANCIENT CARNUNTUM – COMBINING ARCHAEOLOGICAL PROSPECTION, PHOTOGRAMMETRY AND GIS Michael Doneus, Garbriele Scharrer, Institute for Prehistory, IDEA, University of Vienna, University of Vienna, Franz-Kleingasse 1, A-1190 Wien, Austria; Franz-Kleingasse 1, A-1190 Wien, Austria; e-mail: [email protected] e-mail: [email protected] RELATED WORKING GROUP: WG5 – photogrammetry and archaeology KEY WORDS: Artchaeology, GIS, digital photogrammetry, aerial archaeology ABSTRACT The city map of ancient Carnuntum is a joint project of the Institute for Prehistory of the University of Vienna and IDEA (Interdisciplinary Research Intstitute for Archaeology, University of Vienna). Aerial photographs of the last 50 years are used to create a highly detailled map of the archaeological features of Carnuntum, the ancient Roman capital of Pannonia. Using analytical and digital photogrammetry, a 3D model of the landscape was measured and the archaeological features of a large area were mapped with high accuracy. These data are combined with geophysical surveys and excavation results using a GIS-system. The result is a city map of ancient Carnuntum, showing the road system, the single houses, graveyards, public places etc. which consequently will be used by the local archaeologists. KURZFASSUNG Die Erstellung eines Stadtplanes von Carnuntum, der römischen Provinzhauptstadt Pannoniens, ist ein Gemeinschaftsprojekt des Instituts für Ur- und Frühgeschichte der Universität Wien und IDEA (Interdisziplinäres Einrichtung für Archäologie, Universität Wien). Die Basisdaten für die Herstellung einer detaillierten und maßstäblich genauen Karte der archäologischen Landschaft von Carnuntum bilden Luftbilder aus den letzten 50 Jahren. Aus diesen Luftbildern wurde mittels analytischer Photogrammetrie ein digitales Geländemodell erstellt. -

157-160 a Tile from Roman Vienna In
http://akroterion.journals.ac.za http://akroterion.journals.ac.za A TILE FROM ROMAN VIENNA IN JOHANNESBURG1 D B Saddington (University of the Witwatersrand, Johannesburg) Recently Mr W.H. Grimm, who grew up in Vienna, asked me to decipher the letters on a fragment of a tile which he had found as a boy at Carnuntum. Apparently it was lying on the roadside having been thrown there by a farmer ploughing an adjacent field. The tile, now some 7 by 8 cm large, has the letters XIIII G stamped on it but the stamp is incomplete. Originally it must have had the letters LEG before the numeral, i.e., LEG XIIII G. This was an abbreviation for LEG(io) XIV G(emina), the Fourteenth Twin (or composite) Legion.2 Fig. 1 The Carnuntum tile It was the custom of legions and other units in the Roman army (and navy) to stamp the tiles which they manufactured for roofing the buildings in their fortresses.3 They are often discovered: some 2500 are known from Vindobona (Roman Vienna) alone.4 1 I wish to thank Dr. and Mrs. Zabehlicky and Prof. E. Weber of Vienna for kindly discussing the tile with me. 2 The type is recorded in Neumann 1973:87ff. 3 On Roman tileries cf. Hanel 2001: 212; 165ff. 4 Gugl et al. 2005: 971ff. Akroterion 51 (2006) 157-160 http://akroterion.journals.ac.za http://akroterion.journals.ac.za 158 SADDINGTON The Romans had long had a presence on the eastern coast of the Adriatic which they called Illyricum. Julius Caesar had been appointed governor of Illyricum in 59 B.C., but in the end campaigned mainly in Gaul. -

When Did Diocletian Die? Ancient Evidence for an Old Problem
WHEN DID DIOCLETIAN DIE? ANCIENT EVIDENCE FOR AN OLD PROBLEM Mats Waltré 1 Contents Introduction ............................................................................................................................................. 2 Purpose ................................................................................................................................................ 3 Sources .................................................................................................................................................... 3 And what do contemporary sources tell? ........................................................................................... 5 Recent discussion - 311 or 312? .............................................................................................................. 7 Constantine and Lactantius ................................................................................................................. 7 C.Th. xiii, 10, 2 ..................................................................................................................................... 7 When did Diocletian die? New evidence for an old problem ............................................................. 9 Maxentius and Diocletian .................................................................................................................... 9 Ancient evidence ................................................................................................................................... 10 Lactantius ......................................................................................................................................... -
Rs of Marcus a E Us
The reluctant warlord Historical introduction rs of Marcus A e u s With Marcus Aurelius, the Roman Empire was for the fi rst time ruled by two emperors, both adoptive sons of the late Emperor Antoninus Pius (r. AD 138–161). Marcus had selected his nine-year-younger adoptive brother Lucius Verus to be his co-emperor. The two in- dividuals could not have been more different in character. While the ascetic Marcus, whose main interest was philosophy, had been taught to “avoid the ways of the rich” (Meditations 1.3.), critics declaimed against Lucius’ luxurious lifestyle and his habits. By Robert Heiligers state Armenia in the autumn of AD 161. The two imperial brothers acted in unison and the Senate arcus was born on 26 April 121. thought it advantageous that one could stay at After his father died in 129, he home and take care of the public administration was adopted by his paternal while the other one dealt with critical situations grandfather, Marcus Annius at the front. Upon becoming emperor, Marcus MVerus. At the age of eighteen, Marcus served as took the name Marcus Aurelius Antoninus Au- consul under Emperor Antoninus Pius. He mar- gustus. ried Antoninus’ daughter Faustina and would No soldier by upbringing, experience, or na- have at least twelve children with her. The only ture, Marcus nevertheless spent more time away son to survive childhood was Commodus, who on campaign than any of his predecessors. The would later succeed Marcus. In 140, Marcus reign of Marcus Aurelius marked the end of a was made consul again, with Emperor Antoni- long period of relative peace in the second cen- nus Pius as his colleague. -

The New Empire of Diocletian and Constantine
THE NEW EMPIRE OF DIOCLETIAN AND CONSTANTINE THE NEW EMPIRE OF DIOCLETIAN AND CONSTANTINE TIMOTHY D. BARNES HARVARD UNIVERSITY PRESS CAMBRIDGE, MASSACHUSETTS, AND LONDON, ENGLAND 19 8 2 Copyright © 1982 by the President and Fellows of Harvard College All rights reserved Printed in the United States of America Library of Congress Cataloging in Publication Data Barnes, Timothy David. The new empire of Diocletian and Constantine. "Conceived as a companion volume to Constantine and Eusebius" —Pref. Bibliography: p. Includes indexes. 1. Rome —Politics and government—284-476. 2. Diocletian, Emperor of Rome, 245-313. 3. Constantine I, Emperor of Rome, d. 337. I. Title. DG313.B3 937'.08'0922 81-6569 ISBN 0-674-61126-8 AACR2 La méthode historique professe qu'aucune source d'information ne peut être négligée. Tout le monde en convient; mais trop d'historiens paraissent encore ne pas connaître l'importance des infiniment petits. PAUL PEETERS Recherches d'Histoire et de Philologie Orientales PREFACE The present work was conceived as a companion volume to Constantine and Eusebius, to argue in detail dates and facts which are there assumed and made the basis for historical interpretation and synthesis. It has inevitably also be- come an independent work of reference, for it sets out to establish the basic factual framework for a period in the history of the Roman Empire which is both obviously significant and notoriously obscure. Nevertheless, its scope continues to reflect its genesis. I have not attempted to solve all the problems posed by the imperial coinage or the legal sources, nor to draw up lists either of court and financial officials or of military commanders.