The Kepler Conjecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Kepler and Hales: Conjectures and Proofs Dreams and Their
KEPLER AND HALES: CONJECTURES AND PROOFS DREAMS AND THEIR REALIZATION Josef Urban Czech Technical University in Prague Pittsburgh, June 21, 2018 1 / 31 This talk is an experiment Normally I give “serious” talks – I am considered crazy enough But this is Tom’s Birthday Party, so we are allowed to have some fun: This could be in principle a talk about our work on automation and AI for reasoning and formalization, and Tom’s great role in these areas. But the motivations and allusions go back to alchemistic Prague of 1600s and the (un)scientific pursuits of then versions of "singularity", provoking comparisons with our today’s funny attempts at building AI and reasoning systems for solving the great questions of Math, the Universe and Everything. I wonder where this will all take us. Part 1 (Proofs?): Learning automated theorem proving on top of Flyspeck and other corpora Learning formalization (autoformalization) on top of them Part 2 (Conjectures?): How did we get here? What were Kepler & Co trying to do in 1600s? What are we trying to do today? 2 / 31 The Flyspeck project – A Large Proof Corpus Kepler conjecture (1611): The most compact way of stacking balls of the same size in space is a pyramid. V = p 74% 18 Proved by Hales & Ferguson in 1998, 300-page proof + computations Big: Annals of Mathematics gave up reviewing after 4 years Formal proof finished in 2014 20000 lemmas in geometry, analysis, graph theory All of it at https://code.google.com/p/flyspeck/ All of it computer-understandable and verified in HOL Light: -

A Computer Verification of the Kepler Conjecture
ICM 2002 Vol. III 1–3 · · A Computer Verification of the Kepler Conjecture Thomas C. Hales∗ Abstract The Kepler conjecture asserts that the density of a packing of congruent balls in three dimensions is never greater than π/√18. A computer assisted verification confirmed this conjecture in 1998. This article gives a historical introduction to the problem. It describes the procedure that converts this problem into an optimization problem in a finite number of variables and the strategies used to solve this optimization problem. 2000 Mathematics Subject Classification: 52C17. Keywords and Phrases: Sphere packings, Kepler conjecture, Discrete ge- ometry. 1. Historical introduction The Kepler conjecture asserts that the density of a packing of congruent balls in three dimensions is never greater than π/√18 0.74048 .... This is the oldest problem in discrete geometry and is an important≈ part of Hilbert’s 18th problem. An example of a packing achieving this density is the face-centered cubic packing (Figure 1). A packing of balls is an arrangement of nonoverlapping balls of radius 1 in Euclidean space. Each ball is determined by its center, so equivalently it is a arXiv:math/0305012v1 [math.MG] 1 May 2003 collection of points in Euclidean space separated by distances of at least 2. The density of a packing is defined as the lim sup of the densities of the partial packings formed by the balls inside a ball with fixed center of radius R. (By taking the lim sup, rather than lim inf as the density, we prove the Kepler conjecture in the strongest possible sense.) Defined as a limit, the density is insensitive to changes in the packing in any bounded region. -

The Sphere Packing Problem in Dimension 8 Arxiv:1603.04246V2
The sphere packing problem in dimension 8 Maryna S. Viazovska April 5, 2017 8 In this paper we prove that no packing of unit balls in Euclidean space R has density greater than that of the E8-lattice packing. Keywords: Sphere packing, Modular forms, Fourier analysis AMS subject classification: 52C17, 11F03, 11F30 1 Introduction The sphere packing constant measures which portion of d-dimensional Euclidean space d can be covered by non-overlapping unit balls. More precisely, let R be the Euclidean d vector space equipped with distance k · k and Lebesgue measure Vol(·). For x 2 R and d r 2 R>0 we denote by Bd(x; r) the open ball in R with center x and radius r. Let d X ⊂ R be a discrete set of points such that kx − yk ≥ 2 for any distinct x; y 2 X. Then the union [ P = Bd(x; 1) x2X d is a sphere packing. If X is a lattice in R then we say that P is a lattice sphere packing. The finite density of a packing P is defined as Vol(P\ Bd(0; r)) ∆P (r) := ; r > 0: Vol(Bd(0; r)) We define the density of a packing P as the limit superior ∆P := lim sup ∆P (r): r!1 arXiv:1603.04246v2 [math.NT] 4 Apr 2017 The number be want to know is the supremum over all possible packing densities ∆d := sup ∆P ; d P⊂R sphere packing 1 called the sphere packing constant. For which dimensions do we know the exact value of ∆d? Trivially, in dimension 1 we have ∆1 = 1. -

An Overview of the Kepler Conjecture
AN OVERVIEW OF THE KEPLER CONJECTURE Thomas C. Hales 1. Introduction and Review The series of papers in this volume gives a proof of the Kepler conjecture, which asserts that the density of a packing of congruent spheres in three dimensions is never greater than π/√18 0.74048 . This is the oldest problem in discrete geometry and is an important≈ part of Hilbert’s 18th problem. An example of a packing achieving this density is the face-centered cubic packing. A packing of spheres is an arrangement of nonoverlapping spheres of radius 1 in Euclidean space. Each sphere is determined by its center, so equivalently it is a collection of points in Euclidean space separated by distances of at least 2. The density of a packing is defined as the lim sup of the densities of the partial packings formed by spheres inside a ball with fixed center of radius R. (By taking the lim sup, rather than lim inf as the density, we prove the Kepler conjecture in the strongest possible sense.) Defined as a limit, the density is insensitive to changes in the packing in any bounded region. For example, a finite number of spheres can be removed from the face-centered cubic packing without affecting its density. Consequently, it is not possible to hope for any strong uniqueness results for packings of optimal density. The uniqueness established by this work is as strong arXiv:math/9811071v2 [math.MG] 20 May 2002 as can be hoped for. It shows that certain local structures (decomposition stars) attached to the face-centered cubic (fcc) and hexagonal-close packings (hcp) are the only structures that maximize a local density function. -

Nonisotropic Self-Assembly of Nanoparticles: from Compact Packing to Functional Aggregates Xavier Bouju, Etienne Duguet, Fabienne Gauffre, Claude Henry, Myrtil L
Nonisotropic Self-Assembly of Nanoparticles: From Compact Packing to Functional Aggregates Xavier Bouju, Etienne Duguet, Fabienne Gauffre, Claude Henry, Myrtil L. Kahn, Patrice Mélinon, Serge Ravaine To cite this version: Xavier Bouju, Etienne Duguet, Fabienne Gauffre, Claude Henry, Myrtil L. Kahn, et al.. Nonisotropic Self-Assembly of Nanoparticles: From Compact Packing to Functional Aggregates. Advanced Mate- rials, Wiley-VCH Verlag, 2018, 30 (27), pp.1706558. 10.1002/adma.201706558. hal-01795448 HAL Id: hal-01795448 https://hal.archives-ouvertes.fr/hal-01795448 Submitted on 18 Oct 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Non-isotropic self-assembly of nanoparticles: from compact packing to functional aggregates Xavier Bouju∗ CEMES-CNRS (UPR CNRS 8011), Bt F picoLab 29 Rue J. Marvig, BP 94347 31055 Toulouse Cedex 4, France Etienne´ Duguet∗ CNRS, Univ. Bordeaux, ICMCB, UPR 9048, 33600 Pessac, France Fabienne Gauffre∗ Institut des sciences chimiques de Rennes (ISCR), UMR CNRS 6226, 263 avenue du G´en´eral Leclerc, CS 74205, F-35000 Rennes, France Claude Henry∗ Centre interdisciplinaire de nanoscience de Marseille (CINAM), UMR CNRS 7325, Aix-Marseille Universit´e,Campus de Luminy, Case 913, F-13000 Marseille, France Myrtil Kahn∗ Laboratoire de chimie de coordination (LCC), UPR CNRS 8241, 205 route de Narbonne, F-31000 Toulouse, France Patrice M´elinon∗ Universit´ede Lyon, Universit´eClaude Bernard Lyon 1, UMR CNRS 5306, Institut Lumi`ere Mati`ere, F-69622, Villeurbanne, Francey Serge Ravaine CNRS, Univ. -

Big Proof Big Proof
Big Proof Big Proof Sunday, July 9, 2017 Big Conjecture Thomas Hales July 10, 2017 Everything is vague to a degree you do not realize till you have tried to make it precise. – Bertrand Russell Keep your conjectures bold and your refutations brutal. – Nick Horton Sunday, July 9, 2017 Sunday, July 9, 2017 Sphere Packings Sunday, July 9, 2017 Sunday, July 9, 2017 Sunday, July 9, 2017 “Perhaps the most controversial topic to be covered in The Mathematical Intelligencer is the Kepler Conjecture. In The Mathematical Intelligencer, Thomas C. Hales takes on Wu-Yi Hsiang’s 1990 announcement that he had proved the Kepler Conjecture,...” Sunday, July 9, 2017 From [email protected] Wed Aug 19 02:43:02 1998 Date: Sun, 9 Aug 1998 09:54:56 -0400 (EDT) From: Tom Hales <[email protected]> To: Subject: Kepler conjecture Dear colleagues, I have started to distribute copies of a series of papers giving a solution to the Kepler conjecture, the oldest problem in discrete geometry. These results are still preliminary in the sense that they have not been refereed and have not even been submitted for publication, but the proofs are to the best of my knowledge correct and complete. Nearly four hundred years ago, Kepler asserted that no packing of congruent spheres can have a density greater than the density of the face-centered cubic packing. This assertion has come to be known as the Kepler conjecture. In 1900, Hilbert included the Kepler conjecture in his famous list of mathematical problems. In a paper published last year in the journal "Discrete and Computational Geometry," (DCG), I published a detailed plan describing how the Kepler conjecture might be proved. -

What Deans of Informatics Should Tell Their University Presidents1 Robert L
What Deans of Informatics Should Tell Their University Presidents1 Robert L. Constable Dean of the Faculty of Computing and Information Science Cornell University 1. Introduction In North America, a group of department chairs and deans would immediately infer from the title of this article that it is about promoting informatics. Indeed, this article is about how my senior colleagues and I create support for computing and information science (informatics) among university presidents, provosts (rectors), industry leaders, funding agency heads, legislators, potential donors, and other influential people who will listen. It is about the importance of computing and information science to universities and to society as a whole. Appeals for support can be based on many approaches: the excitement of opportunities, fear of failure, envy of other institutions, responsibility for mission, duty to make the world a better place, pride of accomplishment, legacy, or on economic grounds. No matter what the approach, there are three basic facts that sustain the case for informatics. Here they are briefly summarized: (1) The ideas, methods, discoveries, and technologies of computing and information science continue to change the way we work, learn, discover, communicate, heal, express ourselves, manage the planet’s resources, and play. Computers and digital information change whatever they touch and have created a new knowledge paradigm. (2) The impact of fact (1) on the academy has been large and increasing because computing and information science is transforming how we create, preserve, and disseminate knowledge – these are the core functions of universities. The transformation affects all disciplines. (3) Advanced economies are knowledge-based; they depend on information, computing and communication technologies and the people who create and deploy them – the ICT sector. -

Johannes Kepler (1571-1630)
EDUB 1760/PHYS 2700 II. The Scientific Revolution Johannes Kepler (1571-1630) The War on Mars Cameron & Stinner A little background history Where: Holy Roman Empire When: The thirty years war Why: Catholics vs Protestants Johannes Kepler cameron & stinner 2 A little background history Johannes Kepler cameron & stinner 3 The short biography • Johannes Kepler was born in Weil der Stadt, Germany, in 1571. He was a sickly child and his parents were poor. A scholarship allowed him to enter the University of Tübingen. • There he was introduced to the ideas of Copernicus by Maestlin. He first studied to become a priest in Poland but moved Tübingen Graz to Graz, Austria to teach school in 1596. • As mathematics teacher in Graz, Austria, he wrote the first outspoken defense of the Copernican system, the Mysterium Cosmographicum. Johannes Kepler cameron & stinner 4 Mysterium Cosmographicum (1596) Kepler's Platonic solids model of the Solar system. He sent a copy . to Tycho Brahe who needed a theoretician… Johannes Kepler cameron & stinner 5 The short biography Kepler was forced to leave his teaching post at Graz and he moved to Prague to work with the renowned Danish Prague astronomer, Tycho Brahe. Graz He inherited Tycho's post as Imperial Mathematician when Tycho died in 1601. Johannes Kepler cameron & stinner 6 The short biography Using the precise data (~1’) that Tycho had collected, Kepler discovered that the orbit of Mars was an ellipse. In 1609 he published Astronomia Nova, presenting his discoveries, which are now called Kepler's first two laws of planetary motion. Johannes Kepler cameron & stinner 7 Tycho Brahe The Aristocrat The Observer Johannes Kepler cameron & stinner 8 Tycho Brahe - the Observer The Great Comet of 1577 -from Brahe’s notebooks Johannes Kepler cameron & stinner 9 Tycho Brahe’s Cosmology …was a modified heliocentric one Johannes Kepler cameron & stinner 10 The short biography • In 1612 Lutherans were forced out of Prague, so Kepler moved on to Linz, Austria. -
Cannonballs and Honeycombs, Volume 47, Number 4
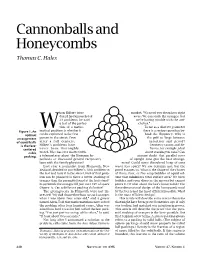
fea-hales.qxp 2/11/00 11:35 AM Page 440 Cannonballs and Honeycombs Thomas C. Hales hen Hilbert intro- market. “We need you down here right duced his famous list of away. We can stack the oranges, but 23 problems, he said we’re having trouble with the arti- a test of the perfec- chokes.” Wtion of a mathe- To me as a discrete geometer Figure 1. An matical problem is whether it there is a serious question be- optimal can be explained to the first hind the flippancy. Why is arrangement person in the street. Even the gulf so large between of equal balls after a full century, intuition and proof? is the face- Hilbert’s problems have Geometry taunts and de- centered never been thoroughly fies us. For example, what cubic tested. Who has ever chatted with about stacking tin cans? Can packing. a telemarketer about the Riemann hy- anyone doubt that parallel rows pothesis or discussed general reciprocity of upright cans give the best arrange- laws with the family physician? ment? Could some disordered heap of cans Last year a journalist from Plymouth, New waste less space? We say certainly not, but the Zealand, decided to put Hilbert’s 18th problem to proof escapes us. What is the shape of the cluster the test and took it to the street. Part of that prob- of three, four, or five soap bubbles of equal vol- lem can be phrased: Is there a better stacking of ume that minimizes total surface area? We blow oranges than the pyramids found at the fruit stand? bubbles and soon discover the answer but cannot In pyramids the oranges fill just over 74% of space prove it. -
MYSTERIES of the EQUILATERAL TRIANGLE, First Published 2010
MYSTERIES OF THE EQUILATERAL TRIANGLE Brian J. McCartin Applied Mathematics Kettering University HIKARI LT D HIKARI LTD Hikari Ltd is a publisher of international scientific journals and books. www.m-hikari.com Brian J. McCartin, MYSTERIES OF THE EQUILATERAL TRIANGLE, First published 2010. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, without the prior permission of the publisher Hikari Ltd. ISBN 978-954-91999-5-6 Copyright c 2010 by Brian J. McCartin Typeset using LATEX. Mathematics Subject Classification: 00A08, 00A09, 00A69, 01A05, 01A70, 51M04, 97U40 Keywords: equilateral triangle, history of mathematics, mathematical bi- ography, recreational mathematics, mathematics competitions, applied math- ematics Published by Hikari Ltd Dedicated to our beloved Beta Katzenteufel for completing our equilateral triangle. Euclid and the Equilateral Triangle (Elements: Book I, Proposition 1) Preface v PREFACE Welcome to Mysteries of the Equilateral Triangle (MOTET), my collection of equilateral triangular arcana. While at first sight this might seem an id- iosyncratic choice of subject matter for such a detailed and elaborate study, a moment’s reflection reveals the worthiness of its selection. Human beings, “being as they be”, tend to take for granted some of their greatest discoveries (witness the wheel, fire, language, music,...). In Mathe- matics, the once flourishing topic of Triangle Geometry has turned fallow and fallen out of vogue (although Phil Davis offers us hope that it may be resusci- tated by The Computer [70]). A regrettable casualty of this general decline in prominence has been the Equilateral Triangle. Yet, the facts remain that Mathematics resides at the very core of human civilization, Geometry lies at the structural heart of Mathematics and the Equilateral Triangle provides one of the marble pillars of Geometry. -

Big Math and the One-Brain Barrier a Position Paper and Architecture Proposal
Mathematical Intelligencer manuscript No. (will be inserted by the editor) Big Math and the One-Brain Barrier A Position Paper and Architecture Proposal Jacques Carette · William M. Farmer · Michael Kohlhase · Florian Rabe the date of receipt and acceptance should be inserted later Abstract Over the last decades, a class of important mathematical results has required an ever increasing amount of human effort to carry out. For some, the help of computers is now indispensable. We analyze the implications of this trend towards big mathematics, its relation to human cognition, and how machine support for big math can be organized. The central contribution of this position paper is an information model for doing mathematics, which posits that humans very efficiently integrate five aspects of mathematics: inference, computation, tabulation, narration, and organization. The challenge for mathematical software systems is to integrate these five aspects in the same way humans do. We include a brief survey of the state of the art from this perspective. Acronyms CFSG: classification of finite simple groups CIC: calculus of inductive constructions DML: digital mathematics library GDML: global digital mathematical library LMFDB: L-functions and Modular Forms Data Base OBB: one-brain barrier OEIS: Online Encyclopedia of Integer Sequences OOT: Feit-Thompson Odd-Order Theorem SGBB: small group brain-pool barrier 1 Introduction In the last half decade we have seen mathematics tackle problems that re- quire increasingly large digital developments: proofs, computations, data sets, arXiv:1904.10405v2 [cs.MS] 22 Oct 2019 Computing and Software, McMaster University · Computing and Software, McMaster Uni- versity · Computer Science, FAU Erlangen-N¨urnberg · Computer Science, FAU Erlangen- N¨urnberg 2 Jacques Carette et al. -
Kepler's Conjecture
KEPLER’S CONJECTURE How Some of the Greatest Minds in History Helped Solve One of the Oldest Math Problems in the World George G. Szpiro John Wiley & Sons, Inc. KEPLER’S CONJECTURE How Some of the Greatest Minds in History Helped Solve One of the Oldest Math Problems in the World George G. Szpiro John Wiley & Sons, Inc. This book is printed on acid-free paper.●∞ Copyright © 2003 by George G. Szpiro. All rights reserved Published by John Wiley & Sons, Inc., Hoboken, New Jersey Published simultaneously in Canada Illustrations on pp. 4, 5, 8, 9, 23, 25, 31, 32, 34, 45, 47, 50, 56, 60, 61, 62, 66, 68, 69, 73, 74, 75, 81, 85, 86, 109, 121, 122, 127, 130, 133, 135, 138, 143, 146, 147, 153, 160, 164, 165, 168, 171, 172, 173, 187, 188, 218, 220, 222, 225, 226, 228, 230, 235, 236, 238, 239, 244, 245, 246, 247, 249, 250, 251, 253, 258, 259, 261, 264, 266, 268, 269, 274, copyright © 2003 by Itay Almog. All rights reserved Photos pp. 12, 37, 54, 77, 100, 115 © Nidersächsische Staats- und Universitätsbib- liothek, Göttingen; p. 52 © Department of Mathematics, University of Oslo; p. 92 © AT&T Labs; p. 224 © Denis Weaire No part of this publication may be reproduced, stored in a retrieval system, or trans- mitted in any form or by any means, electronic, mechanical, photocopying, record- ing, scanning, or otherwise, except as permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior written permission of the Publisher, or authorization through payment of the appropriate per-copy fee to the Copyright Clearance Center, 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax (978) 750-4470, or on the web at www.copyright.com.