Energy Regenerative Damping in Variable Impedance Actuators for Long-Term Robotic Deployment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Potential Energyenergy Isis Storedstored Energyenergy Duedue Toto Anan Objectobject Location.Location
TypesTypes ofof EnergyEnergy && EnergyEnergy TransferTransfer HeatHeat (Thermal)(Thermal) EnergyEnergy HeatHeat (Thermal)(Thermal) EnergyEnergy . HeatHeat energyenergy isis thethe transfertransfer ofof thermalthermal energy.energy. AsAs heatheat energyenergy isis addedadded toto aa substances,substances, thethe temperaturetemperature goesgoes up.up. MaterialMaterial thatthat isis burning,burning, thethe Sun,Sun, andand electricityelectricity areare sourcessources ofof heatheat energy.energy. HeatHeat (Thermal)(Thermal) EnergyEnergy Thermal Energy Explained - Study.com SolarSolar EnergyEnergy SolarSolar EnergyEnergy . SolarSolar energyenergy isis thethe energyenergy fromfrom thethe Sun,Sun, whichwhich providesprovides heatheat andand lightlight energyenergy forfor Earth.Earth. SolarSolar cellscells cancan bebe usedused toto convertconvert solarsolar energyenergy toto electricalelectrical energy.energy. GreenGreen plantsplants useuse solarsolar energyenergy duringduring photosynthesis.photosynthesis. MostMost ofof thethe energyenergy onon thethe EarthEarth camecame fromfrom thethe Sun.Sun. SolarSolar EnergyEnergy Solar Energy - Defined and Explained - Study.com ChemicalChemical (Potential)(Potential) EnergyEnergy ChemicalChemical (Potential)(Potential) EnergyEnergy . ChemicalChemical energyenergy isis energyenergy storedstored inin mattermatter inin chemicalchemical bonds.bonds. ChemicalChemical energyenergy cancan bebe released,released, forfor example,example, inin batteriesbatteries oror food.food. ChemicalChemical (Potential)(Potential) -
An Overview on Principles for Energy Efficient Robot Locomotion
REVIEW published: 11 December 2018 doi: 10.3389/frobt.2018.00129 An Overview on Principles for Energy Efficient Robot Locomotion Navvab Kashiri 1*, Andy Abate 2, Sabrina J. Abram 3, Alin Albu-Schaffer 4, Patrick J. Clary 2, Monica Daley 5, Salman Faraji 6, Raphael Furnemont 7, Manolo Garabini 8, Hartmut Geyer 9, Alena M. Grabowski 10, Jonathan Hurst 2, Jorn Malzahn 1, Glenn Mathijssen 7, David Remy 11, Wesley Roozing 1, Mohammad Shahbazi 1, Surabhi N. Simha 3, Jae-Bok Song 12, Nils Smit-Anseeuw 11, Stefano Stramigioli 13, Bram Vanderborght 7, Yevgeniy Yesilevskiy 11 and Nikos Tsagarakis 1 1 Humanoids and Human Centred Mechatronics Lab, Department of Advanced Robotics, Istituto Italiano di Tecnologia, Genova, Italy, 2 Dynamic Robotics Laboratory, School of MIME, Oregon State University, Corvallis, OR, United States, 3 Department of Biomedical Physiology and Kinesiology, Simon Fraser University, Burnaby, BC, Canada, 4 Robotics and Mechatronics Center, German Aerospace Center, Oberpfaffenhofen, Germany, 5 Structure and Motion Laboratory, Royal Veterinary College, Hertfordshire, United Kingdom, 6 Biorobotics Laboratory, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 7 Robotics and Multibody Mechanics Research Group, Department of Mechanical Engineering, Vrije Universiteit Brussel and Flanders Make, Brussels, Belgium, 8 Centro di Ricerca “Enrico Piaggio”, University of Pisa, Pisa, Italy, 9 Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, United States, 10 Applied Biomechanics Lab, Department of Integrative Physiology, -

UNIVERSITY of CALIFONIA SANTA CRUZ HIGH TEMPERATURE EXPERIMENTAL CHARACTERIZATION of MICROSCALE THERMOELECTRIC EFFECTS a Dissert
UNIVERSITY OF CALIFONIA SANTA CRUZ HIGH TEMPERATURE EXPERIMENTAL CHARACTERIZATION OF MICROSCALE THERMOELECTRIC EFFECTS A dissertation submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in ELECTRICAL ENGINEERING by Tela Favaloro September 2014 The Dissertation of Tela Favaloro is approved: Professor Ali Shakouri, Chair Professor Joel Kubby Professor Nobuhiko Kobayashi Tyrus Miller Vice Provost and Dean of Graduate Studies Copyright © by Tela Favaloro 2014 This work is licensed under a Creative Commons Attribution- NonCommercial-NoDerivatives 4.0 International License Table of Contents List of Figures ............................................................................................................................ vi List of Tables ........................................................................................................................... xiv Nomenclature .......................................................................................................................... xv Abstract ................................................................................................................................. xviii Acknowledgements and Collaborations ................................................................................. xxi Chapter 1 Introduction .......................................................................................................... 1 1.1 Applications of thermoelectric devices for energy conversion ................................... 1 -

Benefits and Challenges of Mechanical Spring Systems for Energy Storage Applications
Available online at www.sciencedirect.com ScienceDirect Energy Procedia 82 ( 2015 ) 805 – 810 ATI 2015 - 70th Conference of the ATI Engineering Association Benefits and challenges of mechanical spring systems for energy storage applications Federico Rossia, Beatrice Castellania*, Andrea Nicolinia aUniversity of Perugia, Department of Engineering, CIRIAF, Via G. Duranti 67, Perugia Abstract Storing the excess mechanical or electrical energy to use it at high demand time has great importance for applications at every scale because of irregularities of demand and supply. Energy storage in elastic deformations in the mechanical domain offers an alternative to the electrical, electrochemical, chemical, and thermal energy storage approaches studied in the recent years. The present paper aims at giving an overview of mechanical spring systems’ potential for energy storage applications. Part of the appeal of elastic energy storage is its ability to discharge quickly, enabling high power densities. This available amount of stored energy may be delivered not only to mechanical loads, but also to systems that convert it to drive an electrical load. Mechanical spring systems’ benefits and limits for storing macroscopic amounts of energy will be assessed and their integration with mechanical and electrical power devices will be discussed. ©© 2015 2015 The The Authors. Authors. Published Published by Elsevier by Elsevier Ltd. This Ltd. is an open access article under the CC BY-NC-ND license (Selectionhttp://creativecommons.org/licenses/by-nc-nd/4.0/ and/or peer-review under responsibility). of ATI Peer-review under responsibility of the Scientific Committee of ATI 2015 Keywords:energy storage; mechanical springs; energy storage density. 1. -

Mechanical Energy
Chapter 2 Mechanical Energy Mechanics is the branch of physics that deals with the motion of objects and the forces that affect that motion. Mechanical energy is similarly any form of energy that’s directly associated with motion or with a force. Kinetic energy is one form of mechanical energy. In this course we’ll also deal with two other types of mechanical energy: gravitational energy,associated with the force of gravity,and elastic energy, associated with the force exerted by a spring or some other object that is stretched or compressed. In this chapter I’ll introduce the formulas for all three types of mechanical energy,starting with gravitational energy. Gravitational Energy An object’s gravitational energy depends on how high it is,and also on its weight. Specifically,the gravitational energy is the product of weight times height: Gravitational energy = (weight) × (height). (2.1) For example,if you lift a brick two feet off the ground,you’ve given it twice as much gravitational energy as if you lift it only one foot,because of the greater height. On the other hand,a brick has more gravitational energy than a marble lifted to the same height,because of the brick’s greater weight. Weight,in the scientific sense of the word,is a measure of the force that gravity exerts on an object,pulling it downward. Equivalently,the weight of an object is the amount of force that you must exert to hold the object up,balancing the downward force of gravity. Weight is not the same thing as mass,which is a measure of the amount of “stuff” in an object. -

Energy Dissipation Mechanism and Damage Model of Marble Failure Under Two Stress Paths
L. Zhang et alii, Frattura ed Integrità Strutturale, 30 (2014) 515-525; DOI: 10.3221/IGF-ESIS.30.62 Energy dissipation mechanism and damage model of marble failure under two stress paths Liming Zhang College of Science, Qingdao Technological University, Qingdao, Shandong 266033, China; [email protected] Co-operative Innovation Center of Engineering Construction and Safety in Shandong Peninsula blue economic zone, Qingdao Technological University ; Qingdao, Shandong 266033, China; [email protected] Mingyuan Ren, Shaoqiong Ma, Zaiquan Wang College of Science, Qingdao Technological University, Qingdao, Shandong 266033, China; Email: [email protected], [email protected], [email protected] ABSTRACT. Marble conventional triaxial loading and unloading failure testing research is carried out to analyze the elastic strain energy and dissipated strain energy evolutionary characteristics of the marble deformation process. The study results show that the change rates of dissipated strain energy are essentially the same in compaction and elastic stages, while the change rate of dissipated strain energy in the plastic segment shows a linear increase, so that the maximum sharp point of the change rate of dissipated strain energy is the failure point. The change rate of dissipated strain energy will increase during unloading confining pressure, and a small sharp point of change rate of dissipated strain energy also appears at the unloading point. The damage variable is defined to analyze the change law of failure variable over strain. In the loading test, the damage variable growth rate is first rapid then slow as a gradual process, while in the unloading test, a sudden increase appears in the damage variable before reaching the rock peak strength. -

Dissipation Potentials from Elastic Collapse
Dissipation potentials from royalsocietypublishing.org/journal/rspa elastic collapse Joe Goddard1 and Ken Kamrin2 1Department of Mechanical and Aerospace Engineering, University Research of California, San Diego, CA, USA 2 Cite this article: Goddard J, Kamrin K. 2019 Department of Mechanical Engineering, Massachusetts Institute of Dissipation potentials from elastic collapse. Technology, Cambridge, MA, USA Proc.R.Soc.A475: 20190144. JG, 0000-0003-4181-4994 http://dx.doi.org/10.1098/rspa.2019.0144 Generalizing Maxwell’s (Maxwell 1867 IV. Phil. Trans. Received: 7 March 2019 R. Soc. Lond. 157, 49–88 (doi:10.1098/rstl.1867.0004)) classical formula, this paper shows how the Accepted: 9 May 2019 dissipation potentials for a dissipative system can be derived from the elastic potential of an elastic system Subject Areas: undergoing continual failure and recovery. Hence, stored elastic energy gives way to dissipated elastic mechanics energy. This continuum-level response is attributed broadly to dissipative microscopic transitions over Keywords: a multi-well potential energy landscape of a type dissipative systems, nonlinear Onsager studied in several previous works, dating from symmetry, elastic failure, energy landscape Prandtl’s (Prandtl 1928 Ein Gedankenmodell zur kinetischen Theorie der festen Körper. ZAMM 8, Author for correspondence: 85–106) model of plasticity. Such transitions are assumed to take place on a characteristic time scale Joe Goddard T, with a nonlinear viscous response that becomes a e-mail: [email protected] plastic response for T → 0. We consider both discrete mechanical systems and their continuum mechanical analogues, showing how the Reiner–Rivlin fluid arises from nonlinear isotropic elasticity. A brief discussion is given in the conclusions of the possible extensions to other dissipative processes. -

The Relationship Between Energy Demand and Real GDP Growth Rate: the Role of Price Asymmetries and Spatial Externalities Within 34 Countries Across the Globe
The relationship between energy demand and real GDP growth rate: the role of price asymmetries and spatial externalities within 34 countries across the globe Panagiotis Fotis a Hellenic Competition Commission Commissioner Sotiris Karkalakos b University of Piraeus and DePaul University Department of Economics Dimitrios Asteriou c Oxford Brookes University Department of Accounting, Finance and Economics Abstract The aim of this paper is to empirically explore the relationship between energy demand and real Gross Domestic Product (GDP) growth and to investigate the role of asymmetries (price and GDP growth asymmetries) and regional externalities on Final Energy Consumption (FEC ) in 34 countries during the period from 2005 to 2013. The paper utilizes a Panel Generalized Method of Moments approach in order to analyse the effect of real GDP growth rate on FEC through an Error Correction Model (ECM) and spatial econometric techniques in order to examine clustered patterns of energy consumption. The results show that a) the demand is elastic both in the industrial and the household/services sectors, b) electricity and natural gas are demand substitutes, c) the relationship between real GDP growth rate and energy consumption exhibits an inverted U – shape, d) price (electricity and gas) and GDP growth asymmetries are supported from the employed parametric and non – parametric tests, and e) distance does not affect FEC, but economic neighbors have a strong positive effect. Keywords: energy demand; dynamic panel data; error correction model; spatial externalities. JEL classification C21; C23; C51; L16; R12 a Corresponding Author , Hellenic Competition Commission, Commissionner, 5 P. Ioakim St., 12132, Peristeri, Greece, Tel.: +30 6947609741, E-mail: [email protected] . -
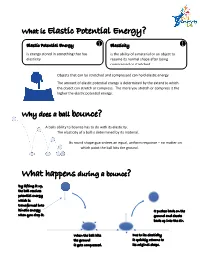
What Is Elastic Potential Energy?
What is Elastic Potential Energy? Elastic Potential Energy Elasticity is energy stored in something that has is the ability of a material or an object to elasticity. resume its normal shape after being compressed or stretched. Objects that can be stretched and compressed can hold elastic energy. The amount of elastic potential energy is determined by the extent to which the object can stretch or compress. The more you stretch or compress it the higher the elastic potential energy. Why does a ball bounce? A balls ability to bounce has to do with its elasticity. The elasticity of a ball is determined by its material. Its round shape guarantees an equal, uniform response – no matter on which point the ball hits the ground. What happens during a bounce? By lifting it up, the ball receives potential energy which is transformed into kinetic energy It pushes back on the when you drop it. ground and shoots back up into the air. When the ball hits Due to its elasticity the ground it quickly returns to it gets compressed. its original shape. For this experiment you will need: Different types of balls, e.g. a tennisball, golfball, marble, basketball… Tape measure Masking tape Pencil Instructions 1) Choose an area next to a wall or table where the ground is rather hard and flat. 2) Use the masking tape and the tape measure to mark different heights: 10’’, 15’’, 20’’, 25’’, 30’’ 3) Start with the first ball: Have a partner drop it from 30’’ DROP the ball – and record the height of the bounce in the Bounce Tracker below. -

Elasticity: Thermodynamic Treatment André Zaoui, Claude Stolz
Elasticity: Thermodynamic Treatment André Zaoui, Claude Stolz To cite this version: André Zaoui, Claude Stolz. Elasticity: Thermodynamic Treatment. Encyclopedia of Materials: Sci- ence and Technology, Elsevier Science, pp.2445-2449, 2000, 10.1016/B0-08-043152-6/00436-8. hal- 00112293 HAL Id: hal-00112293 https://hal.archives-ouvertes.fr/hal-00112293 Submitted on 31 Oct 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Elasticity: Thermodynamic Treatment A similar treatment can be applied to the second principle that relates to the existence of an absolute The elastic behavior of materials is usually described temperature, T, and of a thermodynamic function, the by direct stress–strain relationships which use the fact entropy, obeying a constitutive inequality ensuring that there is a one-to-one connection between the the positivity of the dissipated energy. This leads to the strain and stress tensors ε and σ; some mechanical following local inequality: elastic potentials can then be defined so as to express E G ! the stress tensor as the derivative of the strain potential q r with respect to the strain tensor, or conversely the ρscjdiv k & 0 (2) T T latter as the derivative of the complementary (stress) F H potential with respect to the former. -

Optimization of Energy Efficiency of Walking Bipedal Robots by Use of Elastic Couplings in the Form of Mechanical Springs
Optimization of energy efficiency of walking bipedal robots by use of elastic couplings in the form of mechanical springs Authors: Fabian Bauer, Ulrich Römer, Alexander Fidlin, Wolfgang Seemann Institute of Engineering Mechanics Karlsruhe Institute of Technology Kaiserstraße 10 76131 Karlsruhe Germany Contact: [email protected] Version: accepted manuscript Accepted: 13 September 2015 Published: 12 October 2015 (online) DOI: 10.1007/s11071-015-2402-9 The final publication is available at link.springer.com Nonlinear Dyn manuscript No. (will be inserted by the editor) Optimization of energy efficiency of walking bipedal robots by use of elastic couplings in the form of mechanical springs Fabian Bauer · Ulrich Römer · Alexander Fidlin · Wolfgang Seemann Received: date / Accepted: date Abstract This paper presents a method to optimize the en- 1 Introduction ergy efficiency of walking bipedal robots by more than 50 % in a speed range from 0:3 to 2:3m=s using elastic couplings There are many and varied application scenarios of bipedal – mechanical springs with movement speed independent pa- robots. The most impressive ones are the humanoid as surro- rameters. The considered robot consists of a trunk, two stiff gate of workers in disaster response saving human lives and legs and two actuators in the hip joints. It is modeled as un- the exoskeleton as enhancement of disabled people improv- deractuated system to make use of its natural dynamics and ing human lives. These applications share inherently high feedback controlled with input-output linearization. A nu- mobility requirements, which prohibit an external power sup- merical optimization of the joint angle trajectories as well as ply and therefore directly demand for high energy efficiency. -

S.T.E.M. Science Lesson Elastic Energy System Name ______
S.T.E.M. Science Lesson Elastic Energy System Name _____________________________________________ PROBLEM: What procedure will land the projectile in the can consistently (at least 3 times in a row)? PROCEDURE: (You have 15 minutes to solve the problem.) Launcher: Toilet paper 1. Build the launcher (toilet paper tube, rubber band) tube with rubber band 2. Build the projectile (2 straws, straw piece, masking tape) around it 3. Place the can 1 meter from the launch site Projectile: Masking tape 4. Place projectile on launcher using a protractor to measure angle around two straws with 5. Set the launch angle and the stretch distance straw piece between 6. Test the launcher recording the stretch distance, cm; record the procedure 7. Measure the distance of the projectile; record result: X or ; describe observation (too far; not far enough) 8. Revise the procedure and retest 9. Measure the distance of the projectile; record 10. Continue to revise/retest until the projectile hits the can three times in a row. 11. Share your procedure with another group on an index card 12. Test the procedure of another group and respond on the card: (You have 10 minutes to test another solution) 13. X Does NOT hit the can; Hit the can! GROUP DISCUSSION: (You have 15 minutes to answer the questions in your science journal) 1. What created potential energy in this system? 2. When did you observe kinetic energy in this system? 3. How did you increase and decrease kinetic energy in this system? 4. Did the projectile go farther if the rubber band was stretched farther? 5.