An Unprivileged OS Kernel for General Purpose Distributed Computing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Comparative Evaluation of Matlab, Octave, R, and Julia on Maya 1 Introduction
A Comparative Evaluation of Matlab, Octave, R, and Julia on Maya Sai K. Popuri and Matthias K. Gobbert* Department of Mathematics and Statistics, University of Maryland, Baltimore County *Corresponding author: [email protected], www.umbc.edu/~gobbert Technical Report HPCF{2017{3, hpcf.umbc.edu > Publications Abstract Matlab is the most popular commercial package for numerical computations in mathematics, statistics, the sciences, engineering, and other fields. Octave is a freely available software used for numerical computing. R is a popular open source freely available software often used for statistical analysis and computing. Julia is a recent open source freely available high-level programming language with a sophisticated com- piler for high-performance numerical and statistical computing. They are all available to download on the Linux, Windows, and Mac OS X operating systems. We investigate whether the three freely available software are viable alternatives to Matlab for uses in research and teaching. We compare the results on part of the equipment of the cluster maya in the UMBC High Performance Computing Facility. The equipment has 72 nodes, each with two Intel E5-2650v2 Ivy Bridge (2.6 GHz, 20 MB cache) proces- sors with 8 cores per CPU, for a total of 16 cores per node. All nodes have 64 GB of main memory and are connected by a quad-data rate InfiniBand interconnect. The tests focused on usability lead us to conclude that Octave is the most compatible with Matlab, since it uses the same syntax and has the native capability of running m-files. R was hampered by somewhat different syntax or function names and some missing functions. -

A Case for High Performance Computing with Virtual Machines
A Case for High Performance Computing with Virtual Machines Wei Huangy Jiuxing Liuz Bulent Abaliz Dhabaleswar K. Panday y Computer Science and Engineering z IBM T. J. Watson Research Center The Ohio State University 19 Skyline Drive Columbus, OH 43210 Hawthorne, NY 10532 fhuanwei, [email protected] fjl, [email protected] ABSTRACT in the 1960s [9], but are experiencing a resurgence in both Virtual machine (VM) technologies are experiencing a resur- industry and research communities. A VM environment pro- gence in both industry and research communities. VMs of- vides virtualized hardware interfaces to VMs through a Vir- fer many desirable features such as security, ease of man- tual Machine Monitor (VMM) (also called hypervisor). VM agement, OS customization, performance isolation, check- technologies allow running different guest VMs in a phys- pointing, and migration, which can be very beneficial to ical box, with each guest VM possibly running a different the performance and the manageability of high performance guest operating system. They can also provide secure and computing (HPC) applications. However, very few HPC ap- portable environments to meet the demanding requirements plications are currently running in a virtualized environment of computing resources in modern computing systems. due to the performance overhead of virtualization. Further, Recently, network interconnects such as InfiniBand [16], using VMs for HPC also introduces additional challenges Myrinet [24] and Quadrics [31] are emerging, which provide such as management and distribution of OS images. very low latency (less than 5 µs) and very high bandwidth In this paper we present a case for HPC with virtual ma- (multiple Gbps). -

A Light-Weight Virtual Machine Monitor for Blue Gene/P
A Light-Weight Virtual Machine Monitor for Blue Gene/P Jan Stoessx{1 Udo Steinbergz1 Volkmar Uhlig{1 Jonathan Appavooy1 Amos Waterlandj1 Jens Kehnex xKarlsruhe Institute of Technology zTechnische Universität Dresden {HStreaming LLC jHarvard School of Engineering and Applied Sciences yBoston University ABSTRACT debugging tools. CNK also supports I/O only via function- In this paper, we present a light-weight, micro{kernel-based shipping to I/O nodes. virtual machine monitor (VMM) for the Blue Gene/P Su- CNK's lightweight kernel model is a good choice for the percomputer. Our VMM comprises a small µ-kernel with current set of BG/P HPC applications, providing low oper- virtualization capabilities and, atop, a user-level VMM com- ating system (OS) noise and focusing on performance, scal- ponent that manages virtual BG/P cores, memory, and in- ability, and extensibility. However, today's HPC application terconnects; we also support running native applications space is beginning to scale out towards Exascale systems of directly atop the µ-kernel. Our design goal is to enable truly global dimensions, spanning companies, institutions, compatibility to standard OSes such as Linux on BG/P via and even countries. The restricted support for standardized virtualization, but to also keep the amount of kernel func- application interfaces of light-weight kernels in general and tionality small enough to facilitate shortening the path to CNK in particular renders porting the sprawling diversity applications and lowering OS noise. of scalable applications to supercomputers more and more a Our prototype implementation successfully virtualizes a bottleneck in the development path of HPC applications. -

Opportunities for Leveraging OS Virtualization in High-End Supercomputing
Opportunities for Leveraging OS Virtualization in High-End Supercomputing Kevin T. Pedretti Patrick G. Bridges Sandia National Laboratories∗ University of New Mexico Albuquerque, NM Albuquerque, NM [email protected] [email protected] ABSTRACT formance, making modest virtualization performance over- This paper examines potential motivations for incorporating heads viable. In these cases,the increased flexibility that vir- virtualization support in the system software stacks of high- tualization provides can be used to support a wider range end capability supercomputers. We advocate that this will of applications, to enable exascale co-design research and increase the flexibility of these platforms significantly and development, and provide new capabilities that are not pos- enable new capabilities that are not possible with current sible with the fixed software stacks that high-end capability fixed software stacks. Our results indicate that compute, supercomputers use today. virtual memory, and I/O virtualization overheads are low and can be further mitigated by utilizing well-known tech- The remainder of this paper is organized as follows. Sec- niques such as large paging and VMM bypass. Furthermore, tion 2 discusses previous work dealing with the use of virtu- since the addition of virtualization support does not affect alization in HPC. Section 3 discusses several potential areas the performance of applications using the traditional native where platform virtualization could be useful in high-end environment, there is essentially no disadvantage to its ad- supercomputing. Section 4 presents single node native vs. dition. virtual performance results on a modern Intel platform that show that compute, virtual memory, and I/O virtualization 1. -

A Virtual Machine Environment for Real Time Systems Laboratories
AC 2007-904: A VIRTUAL MACHINE ENVIRONMENT FOR REAL-TIME SYSTEMS LABORATORIES Mukul Shirvaikar, University of Texas-Tyler MUKUL SHIRVAIKAR received the Ph.D. degree in Electrical and Computer Engineering from the University of Tennessee in 1993. He is currently an Associate Professor of Electrical Engineering at the University of Texas at Tyler. He has also held positions at Texas Instruments and the University of West Florida. His research interests include real-time imaging, embedded systems, pattern recognition, and dual-core processor architectures. At the University of Texas he has started a new real-time systems lab using dual-core processor technology. He is also the principal investigator for the “Back-To-Basics” project aimed at engineering student retention. Nikhil Satyala, University of Texas-Tyler NIKHIL SATYALA received the Bachelors degree in Electronics and Communication Engineering from the Jawaharlal Nehru Technological University (JNTU), India in 2004. He is currently pursuing his Masters degree at the University of Texas at Tyler, while working as a research assistant. His research interests include embedded systems, dual-core processor architectures and microprocessors. Page 12.152.1 Page © American Society for Engineering Education, 2007 A Virtual Machine Environment for Real Time Systems Laboratories Abstract The goal of this project was to build a superior environment for a real time system laboratory that would allow users to run Windows and Linux embedded application development tools concurrently on a single computer. These requirements were dictated by real-time system applications which are increasingly being implemented on asymmetric dual-core processors running different operating systems. A real time systems laboratory curriculum based on dual- core architectures has been presented in this forum in the past.2 It was designed for a senior elective course in real time systems at the University of Texas at Tyler that combines lectures along with an integrated lab. -
Three-Dimensional Integrated Circuit Design: EDA, Design And
Integrated Circuits and Systems Series Editor Anantha Chandrakasan, Massachusetts Institute of Technology Cambridge, Massachusetts For other titles published in this series, go to http://www.springer.com/series/7236 Yuan Xie · Jason Cong · Sachin Sapatnekar Editors Three-Dimensional Integrated Circuit Design EDA, Design and Microarchitectures 123 Editors Yuan Xie Jason Cong Department of Computer Science and Department of Computer Science Engineering University of California, Los Angeles Pennsylvania State University [email protected] [email protected] Sachin Sapatnekar Department of Electrical and Computer Engineering University of Minnesota [email protected] ISBN 978-1-4419-0783-7 e-ISBN 978-1-4419-0784-4 DOI 10.1007/978-1-4419-0784-4 Springer New York Dordrecht Heidelberg London Library of Congress Control Number: 2009939282 © Springer Science+Business Media, LLC 2010 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed on acid-free paper Springer is part of Springer Science+Business Media (www.springer.com) Foreword We live in a time of great change. -
GT-Virtual-Machines
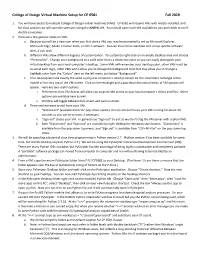
College of Design Virtual Machine Setup for CP 6581 Fall 2020 1. You will have access to multiple College of Design virtual machines (VMs). CP 6581 will require VMs with ArcGIS installed, and for class sessions we will start the semester using the K2GPU VM. You should open each VM available to you and check to see if ArcGIS is installed. 2. Here are a few general notes on VMs. a. Because you will be a new user when you first start a VM, you may be prompted to set up Microsoft Explorer, Microsoft Edge, Adobe Creative Suite, or other software. You can close these windows and set up specific software later, if you wish. b. Different VMs allow different degrees of customization. To customize right-click on an empty Desktop area and choose “Personalize”. Change your background to a solid color that’s a distinctive color so you can easily distinguish your virtual desktop from your local computer’s desktop. Some VMs will remember your desktop color, other VMs must be re-set at each login, other VMs won’t allow you to change the background color but may allow you to change a highlight color from the “Colors” item on the left menu just below “Background”. c. Your desktop will look exactly the same as physical computer’s desktop except for the small black rectangle at the middle of the very top of the VM screen. Click on the rectangle and a pop-down horizontal menu of VM options will appear. Here are two useful options. i. Preferences then File Access will allow you to grant VM access to your local computer’s drives and files. -

Introduction to GNU Octave
Introduction to GNU Octave Hubert Selhofer, revised by Marcel Oliver updated to current Octave version by Thomas L. Scofield 2008/08/16 line 1 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 8 6 4 2 -8 -6 0 -4 -2 -2 0 -4 2 4 -6 6 8 -8 Contents 1 Basics 2 1.1 What is Octave? ........................... 2 1.2 Help! . 2 1.3 Input conventions . 3 1.4 Variables and standard operations . 3 2 Vector and matrix operations 4 2.1 Vectors . 4 2.2 Matrices . 4 1 2.3 Basic matrix arithmetic . 5 2.4 Element-wise operations . 5 2.5 Indexing and slicing . 6 2.6 Solving linear systems of equations . 7 2.7 Inverses, decompositions, eigenvalues . 7 2.8 Testing for zero elements . 8 3 Control structures 8 3.1 Functions . 8 3.2 Global variables . 9 3.3 Loops . 9 3.4 Branching . 9 3.5 Functions of functions . 10 3.6 Efficiency considerations . 10 3.7 Input and output . 11 4 Graphics 11 4.1 2D graphics . 11 4.2 3D graphics: . 12 4.3 Commands for 2D and 3D graphics . 13 5 Exercises 13 5.1 Linear algebra . 13 5.2 Timing . 14 5.3 Stability functions of BDF-integrators . 14 5.4 3D plot . 15 5.5 Hilbert matrix . 15 5.6 Least square fit of a straight line . 16 5.7 Trapezoidal rule . 16 1 Basics 1.1 What is Octave? Octave is an interactive programming language specifically suited for vectoriz- able numerical calculations. -

A Tutorial on Reliable Numerical Computation
A tutorial on reliable numerical computation Paul Zimmermann Dagstuhl seminar 17481, Schloß Dagstuhl, November 2017 The IEEE 754 standard First version in 1985, first revision in 2008, another revision for 2018. Standard formats: binary32, binary64, binary128, decimal64, decimal128 Standard rounding modes (attributes): roundTowardPositive, roundTowardNegative, roundTowardZero, roundTiesToEven p Correct rounding: required for +; −; ×; ÷; ·, recommended for other mathematical functions (sin; exp; log; :::) 2 Different kinds of arithmetic in various languages fixed precision arbitrary precision real double (C) GNU MPFR (C) numbers RDF (Sage) RealField(p) (Sage) MPFI (C) Boost Interval (C++) RealIntervalField(p) (Sage) real INTLAB (Matlab, Octave) RealBallField(p) (Sage) intervals RIF (Sage) libieeep1788 (C++) RBF (Sage) Octave Interval (Octave) libieeep1788 is developed by Marco Nehmeier GNU Octave Interval is developed by Oliver Heimlich 3 An example from Siegfried Rump Reference: S.M. Rump. Gleitkommaarithmetik auf dem Prüfstand [Wie werden verifiziert(e) numerische Lösungen berechnet?]. Jahresbericht der Deutschen Mathematiker-Vereinigung, 118(3):179–226, 2016. a p(a; b) = 21b2 − 2a2 + 55b4 − 10a2b2 + 2b Evaluate p at a = 77617, b = 33096. 4 Rump’s polynomial in the C language #include <stdio.h> TYPE p (TYPE a, TYPE b) { TYPE a2 = a * a; TYPE b2 = b * b; return 21.0*b2 - 2.0*a2 + 55*b2*b2 - 10*a2*b2 + a/(2.0*b); } int main() { printf ("%.16Le\n", (long double) p (77617.0, 33096.0)); } 5 Rump’s polynomial in the C language: results $ gcc -DTYPE=float rump.c && ./a.out -4.3870930862080000e+12 $ gcc -DTYPE=double rump.c && ./a.out 1.1726039400531787e+00 $ gcc -DTYPE="long double" rump.c && ./a.out 1.1726039400531786e+00 $ gcc -DTYPE=__float128 rump.c && ./a.out -8.2739605994682137e-01 6 The MPFR library A reference implementation of IEEE 754 in (binary) arbitrary precision in the C language. -

Virtualizationoverview
VMWAREW H WHITEI T E PPAPERA P E R Virtualization Overview 1 VMWARE WHITE PAPER Table of Contents Introduction .............................................................................................................................................. 3 Virtualization in a Nutshell ................................................................................................................... 3 Virtualization Approaches .................................................................................................................... 4 Virtualization for Server Consolidation and Containment ........................................................... 7 How Virtualization Complements New-Generation Hardware .................................................. 8 Para-virtualization ................................................................................................................................... 8 VMware’s Virtualization Portfolio ........................................................................................................ 9 Glossary ..................................................................................................................................................... 10 2 VMWARE WHITE PAPER Virtualization Overview Introduction Virtualization in a Nutshell Among the leading business challenges confronting CIOs and Simply put, virtualization is an idea whose time has come. IT managers today are: cost-effective utilization of IT infrastruc- The term virtualization broadly describes the separation -
Declustering Spatial Databases on a Multi-Computer Architecture
Declustering spatial databases on a multi-computer architecture 1 2 ? 3 Nikos Koudas and Christos Faloutsos and Ibrahim Kamel 1 Computer Systems Research Institute University of Toronto 2 AT&T Bell Lab oratories Murray Hill, NJ 3 Matsushita Information Technology Lab oratory Abstract. We present a technique to decluster a spatial access metho d + on a shared-nothing multi-computer architecture [DGS 90]. We prop ose a software architecture with the R-tree as the underlying spatial access metho d, with its non-leaf levels on the `master-server' and its leaf no des distributed across the servers. The ma jor contribution of our work is the study of the optimal capacity of leaf no des, or `chunk size' (or `striping unit'): we express the resp onse time on range queries as a function of the `chunk size', and we show how to optimize it. We implemented our metho d on a network of workstations, using a real dataset, and we compared the exp erimental and the theoretical results. The conclusion is that our formula for the resp onse time is very accurate (the maximum relative error was 29%; the typical error was in the vicinity of 10-15%). We illustrate one of the p ossible ways to exploit such an accurate formula, by examining several `what-if ' scenarios. One ma jor, practical conclusion is that a chunk size of 1 page gives either optimal or close to optimal results, for a wide range of the parameters. Keywords: Parallel data bases, spatial access metho ds, shared nothing ar- chitecture. 1 Intro duction One of the requirements for the database management systems (DBMSs) of the future is the ability to handle spatial data. -

Chap01: Computer Abstractions and Technology
CHAPTER 1 Computer Abstractions and Technology 1.1 Introduction 3 1.2 Eight Great Ideas in Computer Architecture 11 1.3 Below Your Program 13 1.4 Under the Covers 16 1.5 Technologies for Building Processors and Memory 24 1.6 Performance 28 1.7 The Power Wall 40 1.8 The Sea Change: The Switch from Uniprocessors to Multiprocessors 43 1.9 Real Stuff: Benchmarking the Intel Core i7 46 1.10 Fallacies and Pitfalls 49 1.11 Concluding Remarks 52 1.12 Historical Perspective and Further Reading 54 1.13 Exercises 54 CMPS290 Class Notes (Chap01) Page 1 / 24 by Kuo-pao Yang 1.1 Introduction 3 Modern computer technology requires professionals of every computing specialty to understand both hardware and software. Classes of Computing Applications and Their Characteristics Personal computers o A computer designed for use by an individual, usually incorporating a graphics display, a keyboard, and a mouse. o Personal computers emphasize delivery of good performance to single users at low cost and usually execute third-party software. o This class of computing drove the evolution of many computing technologies, which is only about 35 years old! Server computers o A computer used for running larger programs for multiple users, often simultaneously, and typically accessed only via a network. o Servers are built from the same basic technology as desktop computers, but provide for greater computing, storage, and input/output capacity. Supercomputers o A class of computers with the highest performance and cost o Supercomputers consist of tens of thousands of processors and many terabytes of memory, and cost tens to hundreds of millions of dollars.