41 Three Dimensional Shapes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Build a Tetrahedral Kite
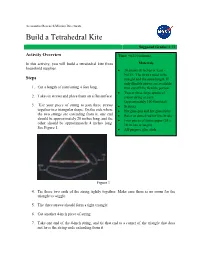
Aeronautics Research Mission Directorate Build a Tetrahedral Kite Suggested Grades: 8-12 Activity Overview Time: 90-120 minutes In this activity, you will build a tetrahedral kite from Materials household supplies. • 24 straws (8 inches or less) - NOTE: The straws need to be Steps straight and the same length. If only flexible straws are available, 1. Cut a length of yarn/string 4 feet long. then cut off the flexible portion. • Two or three large spools of 2. Take six straws and place them on a flat surface. cotton string or yarn (approximately 100 feet total) 3. Use your piece of string to join three straws • Scissors together in a triangular shape. On the side where • Hot glue gun and hot glue sticks the two strings are extending from it, one end • Ruler or dowel rod for kite bridle should be approximately 20 inches long, and the • Four pieces of tissue paper (24 x other should be approximately 4 inches long. 18 inches or larger) See Figure 1. • All-purpose glue stick Figure 1 4. Tie these two ends of the string tightly together. Make sure there is no room for the triangle to wiggle. 5. The three straws should form a tight triangle. 6. Cut another 4-inch piece of string. 7. Take one end of the 4-inch string, and tie that end to a corner of the triangle that does not have the string ends extending from it. Figure 2. 8. Add two more straws onto the longest piece of string. 9. Next, take the string that holds the two additional straws and tie it to the end of one of the 4-inch strings to make another tight triangle. -

THE GEOMETRY of PYRAMIDS One of the More Interesting Solid
THE GEOMETRY OF PYRAMIDS One of the more interesting solid structures which has fascinated individuals for thousands of years going all the way back to the ancient Egyptians is the pyramid. It is a structure in which one takes a closed curve in the x-y plane and connects straight lines between every point on this curve and a fixed point P above the centroid of the curve. Classical pyramids such as the structures at Giza have square bases and lateral sides close in form to equilateral triangles. When the closed curve becomes a circle one obtains a cone and this cone becomes a cylindrical rod when point P is moved to infinity. It is our purpose here to discuss the properties of all N sided pyramids including their volume and surface area using only elementary calculus and geometry. Our starting point will be the following sketch- The base represents a regular N sided polygon with side length ‘a’ . The angle between neighboring radial lines r (shown in red) connecting the polygon vertices with its centroid is θ=2π/N. From this it follows, by the law of cosines, that the length r=a/sqrt[2(1- cos(θ))] . The area of the iscosolis triangle of sides r-a-r is- a a 2 a 2 1 cos( ) A r 2 T 2 4 4 (1 cos( ) From this we have that the area of the N sided polygon and hence the pyramid base will be- 2 2 1 cos( ) Na A N base 2 4 1 cos( ) N 2 It readily follows from this result that a square base N=4 has area Abase=a and a hexagon 2 base N=6 yields Abase= 3sqrt(3)a /2. -

Math 366 Lecture Notes Section 11.4 – Geometry in Three Dimensions
Section 11-4 Math 366 Lecture Notes Section 11.4 – Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a given distance from a given point, the center . A sphere is a simple closed surface. A solid is a simple closed surface with all interior points. (see p. 726) A polyhedron is a simple closed surface made up of polygonal regions, or faces . The vertices of the polygonal regions are the vertices of the polyhedron, and the sides of each polygonal region are the edges of the polyhedron. (see p. 726-727) A prism is a polyhedron in which two congruent faces lie in parallel planes and the other faces are bounded by parallelograms. The parallel faces of a prism are the bases of the prism. A prism is usually names after its bases. The faces other than the bases are the lateral faces of a prism. A right prism is one in which the lateral faces are all bounded by rectangles. An oblique prism is one in which some of the lateral faces are not bounded by rectangles. To draw a prism: 1) Draw one of the bases. 2) Draw vertical segments of equal length from each vertex. 3) Connect the bottom endpoints to form the second base. Use dashed segments for edges that cannot be seen. A pyramid is a polyhedron determined by a polygon and a point not in the plane of the polygon. The pyramid consists of the triangular regions determined by the point and each pair of consecutive vertices of the polygon and the polygonal region determined by the polygon. -

VOLUME of POLYHEDRA USING a TETRAHEDRON BREAKUP We
VOLUME OF POLYHEDRA USING A TETRAHEDRON BREAKUP We have shown in an earlier note that any two dimensional polygon of N sides may be broken up into N-2 triangles T by drawing N-3 lines L connecting every second vertex. Thus the irregular pentagon shown has N=5,T=3, and L=2- With this information, one is at once led to the question-“ How can the volume of any polyhedron in 3D be determined using a set of smaller 3D volume elements”. These smaller 3D eelements are likely to be tetrahedra . This leads one to the conjecture that – A polyhedron with more four faces can have its volume represented by the sum of a certain number of sub-tetrahedra. The volume of any tetrahedron is given by the scalar triple product |V1xV2∙V3|/6, where the three Vs are vector representations of the three edges of the tetrahedron emanating from the same vertex. Here is a picture of one of these tetrahedra- Note that the base area of such a tetrahedron is given by |V1xV2]/2. When this area is multiplied by 1/3 of the height related to the third vector one finds the volume of any tetrahedron given by- x1 y1 z1 (V1xV2 ) V3 Abs Vol = x y z 6 6 2 2 2 x3 y3 z3 , where x,y, and z are the vector components. The next question which arises is how many tetrahedra are required to completely fill a polyhedron? We can arrive at an answer by looking at several different examples. Starting with one of the simplest examples consider the double-tetrahedron shown- It is clear that the entire volume can be generated by two equal volume tetrahedra whose vertexes are placed at [0,0,sqrt(2/3)] and [0,0,-sqrt(2/3)]. -

A Congruence Problem for Polyhedra
A congruence problem for polyhedra Alexander Borisov, Mark Dickinson, Stuart Hastings April 18, 2007 Abstract It is well known that to determine a triangle up to congruence requires 3 measurements: three sides, two sides and the included angle, or one side and two angles. We consider various generalizations of this fact to two and three dimensions. In particular we consider the following question: given a convex polyhedron P , how many measurements are required to determine P up to congruence? We show that in general the answer is that the number of measurements required is equal to the number of edges of the polyhedron. However, for many polyhedra fewer measurements suffice; in the case of the cube we show that nine carefully chosen measurements are enough. We also prove a number of analogous results for planar polygons. In particular we describe a variety of quadrilaterals, including all rhombi and all rectangles, that can be determined up to congruence with only four measurements, and we prove the existence of n-gons requiring only n measurements. Finally, we show that one cannot do better: for any ordered set of n distinct points in the plane one needs at least n measurements to determine this set up to congruence. An appendix by David Allwright shows that the set of twelve face-diagonals of the cube fails to determine the cube up to conjugacy. Allwright gives a classification of all hexahedra with all face- diagonals of equal length. 1 Introduction We discuss a class of problems about the congruence or similarity of three dimensional polyhedra. -

131 865- EDRS PRICE Technclogy,Liedhanical
..DOCUMENT RASH 131 865- JC 760 420 TITLE- Training Program for Teachers of Technical Mathematics in Two-Year Cutricnla. INSTITUTION Queensborough Community Coll., Bayside, N Y. SPONS AGENCY New York State Education Dept., Albany. D v.of Occupational Education Instruction. PUB DATE Jul 76 GRANT VEA-78-2-132 NOTE 180p. EDRS PRICE MP-$0.83 HC-S10.03 Plus Postage. DESCRIPTORS *College Mathematics; Community Colleges; Curriculum Development; Engineering Technology; *Junior Colleges Mathematics Curriculum; *Mathematics Instruction; *Physics Instruction; Practical ,Mathematics Technical Education; *Technical Mathematics Technology ABSTRACT -This handbook 1 is designed'to.aS ist teachers of techhical'mathematics in:developing practically-oriented-curricula -for their students. The upderlying.assumption is that, while technology students are nOt a breed apartr their: needs-and orientation are_to the concrete, rather than the abstract. It describes the:nature, scope,and dontett,of curricula.. in Electrical, TeChnClogy,liedhanical Technology4 Design DraftingTechnology, and: Technical Physics', ..with-particularreterence to:the mathematical skills which are_important for the students,both.incollege.andot -tle job. SaMple mathematical problemsr-derivationSeand.theories tei be stressed it..each of_these.durricula-are presented, as- ate additional materials from the physics an4 mathematics. areas. A frame ok-reference-is.provided through diScussiotS ofthe\careers,for.which-. technology students-are heing- trained'. There.iS alsO §ion deioted to -
Unit 6 Visualising Solid Shapes(Final)
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

Fundamental Principles Governing the Patterning of Polyhedra
FUNDAMENTAL PRINCIPLES GOVERNING THE PATTERNING OF POLYHEDRA B.G. Thomas and M.A. Hann School of Design, University of Leeds, Leeds LS2 9JT, UK. [email protected] ABSTRACT: This paper is concerned with the regular patterning (or tiling) of the five regular polyhedra (known as the Platonic solids). The symmetries of the seventeen classes of regularly repeating patterns are considered, and those pattern classes that are capable of tiling each solid are identified. Based largely on considering the symmetry characteristics of both the pattern and the solid, a first step is made towards generating a series of rules governing the regular tiling of three-dimensional objects. Key words: symmetry, tilings, polyhedra 1. INTRODUCTION A polyhedron has been defined by Coxeter as “a finite, connected set of plane polygons, such that every side of each polygon belongs also to just one other polygon, with the provision that the polygons surrounding each vertex form a single circuit” (Coxeter, 1948, p.4). The polygons that join to form polyhedra are called faces, 1 these faces meet at edges, and edges come together at vertices. The polyhedron forms a single closed surface, dissecting space into two regions, the interior, which is finite, and the exterior that is infinite (Coxeter, 1948, p.5). The regularity of polyhedra involves regular faces, equally surrounded vertices and equal solid angles (Coxeter, 1948, p.16). Under these conditions, there are nine regular polyhedra, five being the convex Platonic solids and four being the concave Kepler-Poinsot solids. The term regular polyhedron is often used to refer only to the Platonic solids (Cromwell, 1997, p.53). -

900.00 Modelability
986.310 Strategic Use of Min-max Cosmic System Limits 986.311 The maximum limit set of identical facets into which any system can be divided consists of 120 similar spherical right triangles ACB whose three corners are 60 degrees at A, 90 degrees at C, and 36 degrees at B. Sixty of these right spherical triangles are positive (active), and 60 are negative (passive). (See Sec. 901.) 986.312 These 120 right spherical surface triangles are described by three different central angles of 37.37736814 degrees for arc AB, 31.71747441 degrees for arc BC, and 20.90515745 degrees for arc AC__which three central-angle arcs total exactly 90 degrees. These 120 spherical right triangles are self-patterned into producing 30 identical spherical diamond groups bounded by the same central angles and having corresponding flat-faceted diamond groups consisting of four of the 120 angularly identical (60 positive, 60 negative) triangles. Their three surface corners are 90 degrees at C, 31.71747441 degrees at B, and 58.2825256 degrees at A. (See Fig. 986.502.) 986.313 These diamonds, like all diamonds, are rhombic forms. The 30- symmetrical- diamond system is called the rhombic triacontahedron: its 30 mid- diamond faces (right- angle cross points) are approximately tangent to the unit- vector-radius sphere when the volume of the rhombic triacontahedron is exactly tetravolume-5. (See Fig. 986.314.) 986.314 I therefore asked Robert Grip and Chris Kitrick to prepare a graphic comparison of the various radii and their respective polyhedral profiles of all the symmetric polyhedra of tetravolume 5 (or close to 5) existing within the primitive cosmic hierarchy (Sec. -

The Crystal Forms of Diamond and Their Significance
THE CRYSTAL FORMS OF DIAMOND AND THEIR SIGNIFICANCE BY SIR C. V. RAMAN AND S. RAMASESHAN (From the Department of Physics, Indian Institute of Science, Bangalore) Received for publication, June 4, 1946 CONTENTS 1. Introductory Statement. 2. General Descriptive Characters. 3~ Some Theoretical Considerations. 4. Geometric Preliminaries. 5. The Configuration of the Edges. 6. The Crystal Symmetry of Diamond. 7. Classification of the Crystal Forros. 8. The Haidinger Diamond. 9. The Triangular Twins. 10. Some Descriptive Notes. 11. The Allo- tropic Modifications of Diamond. 12. Summary. References. Plates. 1. ~NTRODUCTORY STATEMENT THE" crystallography of diamond presents problems of peculiar interest and difficulty. The material as found is usually in the form of complete crystals bounded on all sides by their natural faces, but strangely enough, these faces generally exhibit a marked curvature. The diamonds found in the State of Panna in Central India, for example, are invariably of this kind. Other diamondsJas for example a group of specimens recently acquired for our studies ffom Hyderabad (Deccan)--show both plane and curved faces in combination. Even those diamonds which at first sight seem to resemble the standard forms of geometric crystallography, such as the rhombic dodeca- hedron or the octahedron, are found on scrutiny to exhibit features which preclude such an identification. This is the case, for example, witb. the South African diamonds presented to us for the purpose of these studŸ by the De Beers Mining Corporation of Kimberley. From these facts it is evident that the crystallography of diamond stands in a class by itself apart from that of other substances and needs to be approached from a distinctive stand- point. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs. -

Tetrahedral Decompositions of Hexahedral Meshes
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Europ. J. Combinatorics (1989) 10, 435-443 Tetrahedral Decompositions of Hexahedral Meshes DEREK HACON AND CARLOS TOMEI A hexahedral mesh is a partition of a region in 3-space 1R3 into (not necessarily regular) hexahedra which fit together face to face. We are concerned here with the question of how the hexahedra may be decomposed into tetrahedra without introducing any new vertices. We consider two possible decompositions, in which each hexahedron breaks into five or six tetrahedra in a prescribed fashion. In both cases, we obtain simple verifiable criteria for the existence of a decomposition, by making use of elementary facts of graph theory and algebraic. topology. 1. INTRODUcnON A hexahedral mesh is a partition of a region in 3-space ~3 into (not necessarily regular) hexahedra which fit together face to face. We are concerned here with the question of how the hexahedra may be decomposed into tetrahedra without introduc ing any new vertices. There is one well known [1] way of decomposing a hexahedral mesh into non-overlapping tetrahedra which always works. Start by labelling the vertices 1,2,3, .... Then divide each face into two triangles by the diagonal containing the first vertex of the face. Next consider a hexahedron H with first vertex V. The three faces of H not containing V have already been divided up into a total of six triangles, so take each of these to be the base of a tetrahedron with apex V.