Linear Algebra I: Vector Spaces A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2 Hilbert Spaces You Should Have Seen Some Examples Last Semester
2 Hilbert spaces You should have seen some examples last semester. The simplest (finite-dimensional) ex- C • A complex Hilbert space H is a complete normed space over whose norm is derived from an ample is Cn with its standard inner product. It’s worth recalling from linear algebra that if V is inner product. That is, we assume that there is a sesquilinear form ( , ): H H C, linear in · · × → an n-dimensional (complex) vector space, then from any set of n linearly independent vectors we the first variable and conjugate linear in the second, such that can manufacture an orthonormal basis e1, e2,..., en using the Gram-Schmidt process. In terms of this basis we can write any v V in the form (f ,д) = (д, f ), ∈ v = a e , a = (v, e ) (f , f ) 0 f H, and (f , f ) = 0 = f = 0. i i i i ≥ ∀ ∈ ⇒ ∑ The norm and inner product are related by which can be derived by taking the inner product of the equation v = aiei with ei. We also have n ∑ (f , f ) = f 2. ∥ ∥ v 2 = a 2. ∥ ∥ | i | i=1 We will always assume that H is separable (has a countable dense subset). ∑ Standard infinite-dimensional examples are l2(N) or l2(Z), the space of square-summable As usual for a normed space, the distance on H is given byd(f ,д) = f д = (f д, f д). • • ∥ − ∥ − − sequences, and L2(Ω) where Ω is a measurable subset of Rn. The Cauchy-Schwarz and triangle inequalities, • √ (f ,д) f д , f + д f + д , | | ≤ ∥ ∥∥ ∥ ∥ ∥ ≤ ∥ ∥ ∥ ∥ 2.1 Orthogonality can be derived fairly easily from the inner product. -

The Integral Geometry of Line Complexes and a Theorem of Gelfand-Graev Astérisque, Tome S131 (1985), P
Astérisque VICTOR GUILLEMIN The integral geometry of line complexes and a theorem of Gelfand-Graev Astérisque, tome S131 (1985), p. 135-149 <http://www.numdam.org/item?id=AST_1985__S131__135_0> © Société mathématique de France, 1985, tous droits réservés. L’accès aux archives de la collection « Astérisque » (http://smf4.emath.fr/ Publications/Asterisque/) implique l’accord avec les conditions générales d’uti- lisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Société Mathématique de France Astérisque, hors série, 1985, p. 135-149 THE INTEGRAL GEOMETRY OF LINE COMPLEXES AND A THEOREM OF GELFAND-GRAEV BY Victor GUILLEMIN 1. Introduction Let P = CP3 be the complex three-dimensional projective space and let G = CG(2,4) be the Grassmannian of complex two-dimensional subspaces of C4. To each point p E G corresponds a complex line lp in P. Given a smooth function, /, on P we will show in § 2 how to define properly the line integral, (1.1) f(\)d\ d\. = f(p). d A complex hypersurface, 5, in G is called admissible if there exists no smooth function, /, which is not identically zero but for which the line integrals, (1,1) are zero for all p G 5. In other words if S is admissible, then, in principle, / can be determined by its integrals over the lines, Zp, p G 5. In the 60's GELFAND and GRAEV settled the problem of characterizing which subvarieties, 5, of G have this property. -
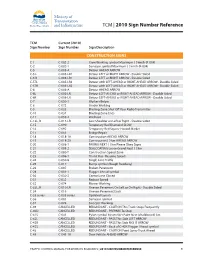
2010 Sign Number Reference for Traffic Control Manual
TCM | 2010 Sign Number Reference TCM Current (2010) Sign Number Sign Number Sign Description CONSTRUCTION SIGNS C-1 C-002-2 Crew Working symbol Maximum ( ) km/h (R-004) C-2 C-002-1 Surveyor symbol Maximum ( ) km/h (R-004) C-5 C-005-A Detour AHEAD ARROW C-5 L C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5 R C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5TL C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-5TR C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6 C-006-A Detour AHEAD ARROW C-6L C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6R C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-7 C-050-1 Workers Below C-8 C-072 Grader Working C-9 C-033 Blasting Zone Shut Off Your Radio Transmitter C-10 C-034 Blasting Zone Ends C-11 C-059-2 Washout C-13L, R C-013-LR Low Shoulder on Left or Right - Double Sided C-15 C-090 Temporary Red Diamond SLOW C-16 C-092 Temporary Red Square Hazard Marker C-17 C-051 Bridge Repair C-18 C-018-1A Construction AHEAD ARROW C-19 C-018-2A Construction ( ) km AHEAD ARROW C-20 C-008-1 PAVING NEXT ( ) km Please Obey Signs C-21 C-008-2 SEALCOATING Loose Gravel Next ( ) km C-22 C-080-T Construction Speed Zone C-23 C-086-1 Thank You - Resume Speed C-24 C-030-8 Single Lane Traffic C-25 C-017 Bump symbol (Rough Roadway) C-26 C-007 Broken Pavement C-28 C-001-1 Flagger Ahead symbol C-30 C-030-2 Centre Lane Closed C-31 C-032 Reduce Speed C-32 C-074 Mower Working C-33L, R C-010-LR Uneven Pavement On Left or On Right - Double Sided C-34 -

18.06 Linear Algebra, Problem Set 5 Solutions
18.06 Problem Set 5 Solution Total: points Section 4.1. Problem 7. Every system with no solution is like the one in problem 6. There are numbers y1; : : : ; ym that multiply the m equations so they add up to 0 = 1. This is called Fredholm’s Alternative: T Exactly one of these problems has a solution: Ax = b OR A y = 0 with T y b = 1. T If b is not in the column space of A it is not orthogonal to the nullspace of A . Multiply the equations x1 − x2 = 1 and x2 − x3 = 1 and x1 − x3 = 1 by numbers y1; y2; y3 chosen so that the equations add up to 0 = 1. Solution (4 points) Let y1 = 1, y2 = 1 and y3 = −1. Then the left-hand side of the sum of the equations is (x1 − x2) + (x2 − x3) − (x1 − x3) = x1 − x2 + x2 − x3 + x3 − x1 = 0 and the right-hand side is 1 + 1 − 1 = 1: Problem 9. If AT Ax = 0 then Ax = 0. Reason: Ax is inthe nullspace of AT and also in the of A and those spaces are . Conclusion: AT A has the same nullspace as A. This key fact is repeated in the next section. Solution (4 points) Ax is in the nullspace of AT and also in the column space of A and those spaces are orthogonal. Problem 31. The command N=null(A) will produce a basis for the nullspace of A. Then the command B=null(N') will produce a basis for the of A. -

Glossary of Linear Algebra Terms
INNER PRODUCT SPACES AND THE GRAM-SCHMIDT PROCESS A. HAVENS 1. The Dot Product and Orthogonality 1.1. Review of the Dot Product. We first recall the notion of the dot product, which gives us a familiar example of an inner product structure on the real vector spaces Rn. This product is connected to the Euclidean geometry of Rn, via lengths and angles measured in Rn. Later, we will introduce inner product spaces in general, and use their structure to define general notions of length and angle on other vector spaces. Definition 1.1. The dot product of real n-vectors in the Euclidean vector space Rn is the scalar product · : Rn × Rn ! R given by the rule n n ! n X X X (u; v) = uiei; viei 7! uivi : i=1 i=1 i n Here BS := (e1;:::; en) is the standard basis of R . With respect to our conventions on basis and matrix multiplication, we may also express the dot product as the matrix-vector product 2 3 v1 6 7 t î ó 6 . 7 u v = u1 : : : un 6 . 7 : 4 5 vn It is a good exercise to verify the following proposition. Proposition 1.1. Let u; v; w 2 Rn be any real n-vectors, and s; t 2 R be any scalars. The Euclidean dot product (u; v) 7! u · v satisfies the following properties. (i:) The dot product is symmetric: u · v = v · u. (ii:) The dot product is bilinear: • (su) · v = s(u · v) = u · (sv), • (u + v) · w = u · w + v · w. -
Final Exam Outline 1.1, 1.2 Scalars and Vectors in R N. the Magnitude
Final Exam Outline 1.1, 1.2 Scalars and vectors in Rn. The magnitude of a vector. Row and column vectors. Vector addition. Scalar multiplication. The zero vector. Vector subtraction. Distance in Rn. Unit vectors. Linear combinations. The dot product. The angle between two vectors. Orthogonality. The CBS and triangle inequalities. Theorem 1.5. 2.1, 2.2 Systems of linear equations. Consistent and inconsistent systems. The coefficient and augmented matrices. Elementary row operations. The echelon form of a matrix. Gaussian elimination. Equivalent matrices. The reduced row echelon form. Gauss-Jordan elimination. Leading and free variables. The rank of a matrix. The rank theorem. Homogeneous systems. Theorem 2.2. 2.3 The span of a set of vectors. Linear dependence. Linear dependence and independence. Determining n whether a set {~v1, . ,~vk} of vectors in R is linearly dependent or independent. 3.1, 3.2 Matrix operations. Scalar multiplication, matrix addition, matrix multiplication. The zero and identity matrices. Partitioned matrices. The outer product form. The standard unit vectors. The transpose of a matrix. A system of linear equations in matrix form. Algebraic properties of the transpose. 3.3 The inverse of a matrix. Invertible (nonsingular) matrices. The uniqueness of the solution to Ax = b when A is invertible. The inverse of a nonsingular 2 × 2 matrix. Elementary matrices and EROs. Equivalent conditions for invertibility. Using Gauss-Jordan elimination to invert a nonsingular matrix. Theorems 3.7, 3.9. n n n 3.5 Subspaces of R . {0} and R as subspaces of R . The subspace span(v1,..., vk). The the row, column and null spaces of a matrix. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Span, Linear Independence and Basis Rank and Nullity
Remarks for Exam 2 in Linear Algebra Span, linear independence and basis The span of a set of vectors is the set of all linear combinations of the vectors. A set of vectors is linearly independent if the only solution to c1v1 + ::: + ckvk = 0 is ci = 0 for all i. Given a set of vectors, you can determine if they are linearly independent by writing the vectors as the columns of the matrix A, and solving Ax = 0. If there are any non-zero solutions, then the vectors are linearly dependent. If the only solution is x = 0, then they are linearly independent. A basis for a subspace S of Rn is a set of vectors that spans S and is linearly independent. There are many bases, but every basis must have exactly k = dim(S) vectors. A spanning set in S must contain at least k vectors, and a linearly independent set in S can contain at most k vectors. A spanning set in S with exactly k vectors is a basis. A linearly independent set in S with exactly k vectors is a basis. Rank and nullity The span of the rows of matrix A is the row space of A. The span of the columns of A is the column space C(A). The row and column spaces always have the same dimension, called the rank of A. Let r = rank(A). Then r is the maximal number of linearly independent row vectors, and the maximal number of linearly independent column vectors. So if r < n then the columns are linearly dependent; if r < m then the rows are linearly dependent. -

Maxwell's Equations in Differential Form
M03_RAO3333_1_SE_CHO3.QXD 4/9/08 1:17 PM Page 71 CHAPTER Maxwell’s Equations in Differential Form 3 In Chapter 2 we introduced Maxwell’s equations in integral form. We learned that the quantities involved in the formulation of these equations are the scalar quantities, elec- tromotive force, magnetomotive force, magnetic flux, displacement flux, charge, and current, which are related to the field vectors and source densities through line, surface, and volume integrals. Thus, the integral forms of Maxwell’s equations,while containing all the information pertinent to the interdependence of the field and source quantities over a given region in space, do not permit us to study directly the interaction between the field vectors and their relationships with the source densities at individual points. It is our goal in this chapter to derive the differential forms of Maxwell’s equations that apply directly to the field vectors and source densities at a given point. We shall derive Maxwell’s equations in differential form by applying Maxwell’s equations in integral form to infinitesimal closed paths, surfaces, and volumes, in the limit that they shrink to points. We will find that the differential equations relate the spatial variations of the field vectors at a given point to their temporal variations and to the charge and current densities at that point. In this process we shall also learn two important operations in vector calculus, known as curl and divergence, and two related theorems, known as Stokes’ and divergence theorems. 3.1 FARADAY’S LAW We recall from the previous chapter that Faraday’s law is given in integral form by d E # dl =- B # dS (3.1) CC dt LS where S is any surface bounded by the closed path C.In the most general case,the elec- tric and magnetic fields have all three components (x, y,and z) and are dependent on all three coordinates (x, y,and z) in addition to time (t). -

CR Singular Immersions of Complex Projective Spaces
Beitr¨agezur Algebra und Geometrie Contributions to Algebra and Geometry Volume 43 (2002), No. 2, 451-477. CR Singular Immersions of Complex Projective Spaces Adam Coffman∗ Department of Mathematical Sciences Indiana University Purdue University Fort Wayne Fort Wayne, IN 46805-1499 e-mail: Coff[email protected] Abstract. Quadratically parametrized smooth maps from one complex projective space to another are constructed as projections of the Segre map of the complexifi- cation. A classification theorem relates equivalence classes of projections to congru- ence classes of matrix pencils. Maps from the 2-sphere to the complex projective plane, which generalize stereographic projection, and immersions of the complex projective plane in four and five complex dimensions, are considered in detail. Of particular interest are the CR singular points in the image. MSC 2000: 14E05, 14P05, 15A22, 32S20, 32V40 1. Introduction It was shown by [23] that the complex projective plane CP 2 can be embedded in R7. An example of such an embedding, where R7 is considered as a subspace of C4, and CP 2 has complex homogeneous coordinates [z1 : z2 : z3], was given by the following parametric map: 1 2 2 [z1 : z2 : z3] 7→ 2 2 2 (z2z¯3, z3z¯1, z1z¯2, |z1| − |z2| ). |z1| + |z2| + |z3| Another parametric map of a similar form embeds the complex projective line CP 1 in R3 ⊆ C2: 1 2 2 [z0 : z1] 7→ 2 2 (2¯z0z1, |z1| − |z0| ). |z0| + |z1| ∗The author’s research was supported in part by a 1999 IPFW Summer Faculty Research Grant. 0138-4821/93 $ 2.50 c 2002 Heldermann Verlag 452 Adam Coffman: CR Singular Immersions of Complex Projective Spaces This may look more familiar when restricted to an affine neighborhood, [z0 : z1] = (1, z) = (1, x + iy), so the set of complex numbers is mapped to the unit sphere: 2x 2y |z|2 − 1 z 7→ ( , , ), 1 + |z|2 1 + |z|2 1 + |z|2 and the “point at infinity”, [0 : 1], is mapped to the point (0, 0, 1) ∈ R3. -

Rotation Matrix - Wikipedia, the Free Encyclopedia Page 1 of 22
Rotation matrix - Wikipedia, the free encyclopedia Page 1 of 22 Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy -Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be represented by a column vector v, containing the coordinates of the point. A rotated vector is obtained by using the matrix multiplication Rv (see below for details). In two and three dimensions, rotation matrices are among the simplest algebraic descriptions of rotations, and are used extensively for computations in geometry, physics, and computer graphics. Though most applications involve rotations in two or three dimensions, rotation matrices can be defined for n-dimensional space. Rotation matrices are always square, with real entries. Algebraically, a rotation matrix in n-dimensions is a n × n special orthogonal matrix, i.e. an orthogonal matrix whose determinant is 1: . The set of all rotation matrices forms a group, known as the rotation group or the special orthogonal group. It is a subset of the orthogonal group, which includes reflections and consists of all orthogonal matrices with determinant 1 or -1, and of the special linear group, which includes all volume-preserving transformations and consists of matrices with determinant 1. Contents 1 Rotations in two dimensions 1.1 Non-standard orientation -

Some C*-Algebras with a Single Generator*1 )
transactions of the american mathematical society Volume 215, 1976 SOMEC*-ALGEBRAS WITH A SINGLEGENERATOR*1 ) BY CATHERINE L. OLSEN AND WILLIAM R. ZAME ABSTRACT. This paper grew out of the following question: If X is a com- pact subset of Cn, is C(X) ® M„ (the C*-algebra of n x n matrices with entries from C(X)) singly generated? It is shown that the answer is affirmative; in fact, A ® M„ is singly generated whenever A is a C*-algebra with identity, generated by a set of n(n + l)/2 elements of which n(n - l)/2 are selfadjoint. If A is a separable C*-algebra with identity, then A ® K and A ® U are shown to be sing- ly generated, where K is the algebra of compact operators in a separable, infinite- dimensional Hubert space, and U is any UHF algebra. In all these cases, the gen- erator is explicitly constructed. 1. Introduction. This paper grew out of a question raised by Claude Scho- chet and communicated to us by J. A. Deddens: If X is a compact subset of C, is C(X) ® M„ (the C*-algebra ofnxn matrices with entries from C(X)) singly generated? We show that the answer is affirmative; in fact, A ® Mn is singly gen- erated whenever A is a C*-algebra with identity, generated by a set of n(n + l)/2 elements of which n(n - l)/2 are selfadjoint. Working towards a converse, we show that A ® M2 need not be singly generated if A is generated by a set con- sisting of four elements.