Methods of Using Mobile Internet Devices in the Formation of The
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Controlling Phonons and Photons at the Wavelength-Scale: Silicon Photonics Meets Silicon Phononics
1 Controlling phonons and photons at the wavelength-scale: silicon photonics meets silicon phononics AMIR H. SAFAVI-NAEINI1,D RIES VAN THOURHOUT2,R OEL BAETS2, AND RAPHAËL VAN LAER1,2 1Department of Applied Physics and Ginzton Laboratory, Stanford University, USA 2Photonics Research Group (INTEC), Department of Information Technology, Ghent University–imec, Belgium .Center for Nano- and Biophotonics, Ghent University, Belgium Compiled October 9, 2018 Radio-frequency communication systems have long used bulk- and surface-acoustic-wave de- vices supporting ultrasonic mechanical waves to manipulate and sense signals. These devices have greatly improved our ability to process microwaves by interfacing them to orders-of- magnitude slower and lower loss mechanical fields. In parallel, long-distance communications have been dominated by low-loss infrared optical photons. As electrical signal processing and transmission approaches physical limits imposed by energy dissipation, optical links are now being actively considered for mobile and cloud technologies. Thus there is a strong driver for wavelength-scale mechanical wave or “phononic” circuitry fabricated by scalable semiconduc- tor processes. With the advent of these circuits, new micro- and nanostructures that combine electrical, optical and mechanical elements have emerged. In these devices, such as optomechan- ical waveguides and resonators, optical photons and gigahertz phonons are ideally matched to one another as both have wavelengths on the order of micrometers. The development of phononic circuits has thus emerged as a vibrant field of research pursued for optical signal pro- cessing and sensing applications as well as emerging quantum technologies. In this review, we discuss the key physics and figures of merit underpinning this field. -
Electrical Engineering Engineering
College of Electrical Engineering Engineering The undergraduate electrical engineering degree program seeks to produce gradu- Second Semester ates who are trained in the theory and practice of electrical and computer engineering EE 468G Introduction to Engineering Electromagnetics ........................................ 4 and are well prepared to handle the professional and leadership challenges of their Elective EE Laboratory [L] ...................................................................................... 2 careers. The program allows students to specialize in high performance and embed- Engineering/Science Elective [E] ............................................................................ 3 ded computing, microelectronics and nanotechnology, power and energy, signal Technical Elective [T] ............................................................................................. 3 processing and communications, high frequency circuits and fields, and control UK Core – Citizenship - USA .................................................................................. 3 systems, among others. Senior Year Degree Requirements The following curriculum meets the requirements for a B.S. in Electrical Engineering, First Semester Hours provided the student satisfies UK Core requirements and graduation requirements EE/CPE 490 ECE Capstone Design I† ..................................................................... 3 of the College of Engineering. EE Technical Elective* ........................................................................................... -

Titular Capítulo
Jornadas In-Red 2014 Universitat Politècnica de València Doi************** Experiencias de aplicación de la simulación empleando software libre y gratuito en la enseñanza de las ingenierías de la rama industrial Asunción Santafé Morosa, José M. Gozálvez Zafrillaa, Javier Navarro Laboulaisa, Salvador Cardona Navarretea, Rafael Miró Herreroa, Juan Carlos García Díazb a Departamento de Ingeniería Química y Nuclear, Universitat Politècnica de Valencia, [email protected] b Departamento de Estadística e Investigación Operativa, Universitat Politècnica de Valencia. Resumen En este trabajo se presentan las experiencias de utilización de software libre y gratuito llevadas a cabo por el Equipo de Innovación y Calidad Educativa ASEI (Aplicación de la Simulación en la Enseñanza de la Ingeniería) en asignaturas de las áreas de Ingeniería Química, Nuclear y Estadística que requieren la utilización de software de cálculo y herramientas de simulación. El software libre puede ser utilizado como una herramienta en metodologías docentes basadas en el uso de la simulación en el aula de teoría o bien como una forma de disminuir los costes en la enseñanza y aportar nuevos valores. Adecuadamente empleadas, las metodologías basadas en el uso de programas de simulación pueden estimular la capacidad de autoaprendizaje del alumno. En esta comunicación se muestran ejemplos del amplio abanico de aplicaciones de software que se pueden utilizar sin representar coste para la Universidad y posteriormente para la empresa. Palabras clave: competencias, formación, metodologías activas, simulación, software libre. 2014, Universitat Politècnica de València 1 I Jornadas In-Red (2014): 1-9 Experiencias de aplicación de la simulación empleando software libre y gratuito en la enseñanza de las ingenierías de la rama industrial 1. -

Linux Mint Debian Edition (LMDE) Di Giorgio Beltrammi
Guida a Linux Mint Debian Edition Guida a Linux Mint Debian Edition (LMDE) di Giorgio Beltrammi 1 2 Guida a Linux Mint Debian Edition 3 4 Guida a Linux Mint Debian Edition INDICE INTRODUZIONE ¼................................. 9 Note di Consultazione ¼........................ 9 Linux Mint Debian Edition ¼.................... 11 Per utenti Windows ¼........................... 17 DOWNLOAD & MASTERIZZAZIONE .................... 23 Download & Masterizzazione ¼................... 23 Download....................................... 25 Checksum....................................... 27 LIVE & INSTALLAZIONE ¼......................... 29 Cos©è un sistema Live.......................... 29 Partizionamento ¼.............................. 33 Installazione ¼................................ 39 Postinstallazione.............................. 47 Personalizzare Mint............................ 53 PERSONALE...................................... 61 Applicazioni d©avvio ¼......................... 61 Applicazioni preferite......................... 65 Gestione File.................................. 67 Scorciatoie Tastiera.......¼................... 69 Tecnologie Assistive........................... 71 ASPETTO & STILE................................ 73 Aspetto........................................ 73 Impostazioni del Desktop....................... 79 Menu Principale................................ 81 Salvaschermo................................... 85 INTERNET & RETE................................ 87 Bluetooth...................................... 87 5 Condivisione -
Electrical and Computer Engineering Course
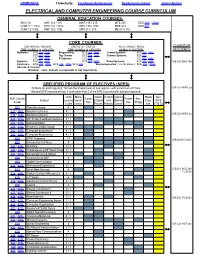
HOMEPAGE Flowcharts: Freshman-Sophomore Sophomore-Junior Junior-Senior ELECTRICAL AND COMPUTER ENGINEERING COURSE CURRICULUM GENERAL EDUCATION COURSES: BIO 110 MAT 114 / 115 MAT 116 / 216 MTE 207 ECE 302 / 352L* CHM 111 / 151L PHY 131 / 151L PHY 133 / 153L MTE 214 ECE 311 CHM 112 / 152L PHY 132 / 132L MAT 214 / 215 ME 214 / 215 CORE COURSES: CONTINOUS / ANALOG DISCRETE / DIGITAL REAL / MIXED MODE CHOICE OF TIME SIGNALS & CIRCUITS TIME SIGNALS & CIRCUITS SIGNAL & SYSTEMS SEQUENCE Networks: ECE 109 / 129L Programming: ECE 114 , 164L Control Systems: ECE 309 , 359L ECE 207 , 252L Dig. Circuits ECE 204 , 244L Commu. Systems: ECE 315 ECE 209 , 253L & Systems: ECE 308 ECE 405 , 445L Systems: ECE 307 , 357L ECE 341 / 391L Power Systems: ECE 310 / 360L IGE120 ENG104 Electronic ECE 220 , 270L , ECE 320 , 370L, ECE 330 *Electromagnetics: ( in GE above ) ECE 302 / 352L Devices & Circuits: Notation: / and , indicate co-requisiste or not respectively SPECIFIED PROGRAM OF ELECTIVES (SPES) 20 Units for each required, 16 from the shaded ares in one column, with a minimum of 2 labs. IGE121AREA 3a General SPE requires at least 5 units each from 2 of the SPE Columns with advisors approval. Units Micro- Comm. Control Instrum Radio Gen. ECE Course Comp. Power Illum. Subject Lecture electr- & Signal and Biomed Freq. S P E & Lab Sys. Sys. Engg / Labs onics Proces. Robotic Ocean Sys. (T B D) 303 Data Structures 4 317 / 367L Electromechanics 4 / 1 IGE122 AREA 3c 318 / 368L Electromechanics 4 / 1 322 / 372L OP Amps./Feedback Systems 4 / 1 323 / 373L Instrumentation -
Electromechanical Motion Fundamentals
Electromechanical Motion Fundamentals • Electric Machine – device that can convert either mechanical energy to electrical energy or electrical energy to mechanical energy – mechanical to electrical: generator – electrical to mechanical: motor – all practical motors and generators convert energy from one form to another through the action of a magnetic field • Transformer – device that converts ac electric energy at one voltage level to ac electric energy at another voltage level Sensors & Actuators in Mechatronics K. Craig Electromechanical Motion Fundamentals 1 – It operates on the same principles as generators and motors, i.e., it depends on the action of a magnetic field to accomplish the change in voltage level • Motors, Generators, and Transformers are ubiquitous in modern daily life. Why? – Electric power is: • Clean • Efficient • Easy to transmit over long distances • Easy to control • Environmental benefits Sensors & Actuators in Mechatronics K. Craig Electromechanical Motion Fundamentals 2 • Purpose of this Study – provide basic knowledge of electromechanical motion devices for mechatronic engineers – focus on electromechanical rotational devices commonly used in low-power mechatronic systems • permanent magnet dc motor • brushless dc motor • stepper motor • Topics Covered: – Magnetic and Magnetically-Coupled Circuits – Principles of Electromechanical Energy Conversion Sensors & Actuators in Mechatronics K. Craig Electromechanical Motion Fundamentals 3 References • Electromechanical Motion Devices, P. Krause and O. Wasynczuk, McGraw Hill, 1989. • Electromechanical Dynamics, H. Woodson and J. Melcher, Wiley, 1968. • Electric Machinery Fundamentals, 3rd Edition, S. Chapman, McGraw Hill, 1999. • Driving Force, The Natural Magic of Magnets, J. Livingston, Harvard University Press, 1996. • Applied Electromagnetics, M. Plonus, McGraw Hill, 1978. • Electromechanics and Electric Machines, S. Nasar and L. Unnewehr, Wiley, 1979. -

Electromechanical Dynamics
Electromechanical Dynamics James R. Melcher Herbert H. Woodson MIT OpenCourseWare http://ocw.mit.edu Electromechanical Dynamics For any use or distribution of this textbook, please cite as follows: Woodson, Herbert H., and James R. Melcher. Electromechanical Dynamics. 3 vols. (Massachusetts Institute of Technology: MIT OpenCourseWare). http://ocw.mit.edu (accessed MM DD, YYYY). License: Creative Commons Attribution-NonCommercial-Share Alike For more information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms ELECTROMECHANICAL DYNAMICS Part I: Discrete Systems ELECTROMECHANICAL DYNAMICS Part I: Discrete Systems HERBERT H. WOODSON Philip Sporn Professor of Energy Processing Departments of Electrical and Mechanical Engineering JAMES R. MELCHER Associate Professor of Electrical Engineering Department of Electrical Engineering both of Massachusetts Institute of Technology JOHN WILEY & SONS, INC., NEW YORK - LONDON . SYDNEY __ ~__ To our parents I_ PREFACE Part I: Discrete Systems In the early 1950's the option structure was abandoned and a common core curriculum was instituted for all electrical engineering students at M.I.T. The objective of the core curriculum was then, and is now, to provide a foundation in mathematics and science on which a student can build in his professional growth, regardless of the many opportunities in electrical engineering from which he may choose. In meeting this objective, core curriculum subjects cannot serve the needs of any professional area with respect to nomenclature, techniques, and problems unique to that area. Specialization comes in elective subjects, graduate study, and professional activities. To be effective a core curriculum subject must be broad enough to be germane to the many directions an electrical engineer may go professionally, yet it must have adequate depth to be of lasting value. -

Campus Curricula Committee Meeting Agenda April 3, 2013 12 Pm Room 117 Fulton Hall
Campus Curricula Committee Meeting Agenda April 3, 2013 12 pm Room 117 Fulton Hall Review of submitted DC forms: DC #0454, Electrical and Computer Engineering, Bachelor of Science in Electrical Engineering, effective Fall 2013. DC #0455, Electrical and Computer Engineering, Bachelor of Science in Electrical Engineering, effective Fall 2013. DC #0456, Electrical and Computer Engineering, Bachelor of Science in Computer Engineering, effective Fall 2013. DC #0466, Materials Science and Engineering, Minor in Materials Science and Engineering, effective Fall 2013. DC #0467, Psychological Science, Bachelor of Arts in Psychology and Bachelor of Science in Psychology, effective Fall 2013. DC #0468, Psychological Science, Bachelor of Science in Psychology and Bachelor of Science in Psychology with Secondary Education Emphasis, effective Fall 2013. DC #0469, Civil, Architectural and Environmental Engineering, Bachelor of Science in Civil Engineering, effective Fall 2013. DC #0470, Civil, Architectural and Environmental Engineering, Bachelor of Science in Civil Engineering, effective Fall 2013. DC #0471, Information Science and Technology, Minor in Digital Supply Chain Management, effective Fall 2013. DC #0472, Manufacturing Engineering, Master of Science in Manufacturing Engineering, effective Fall 2013. Page 1 Office of the Registrar • 103 Parker Hall • 300 West 13 th Street • Rolla, MO 65409-0930 Phone: 573-341-4181 • Fax: 573-341-4362 • Email: [email protected] • Web: http://registrar.mst.edu An equal opportunity institution DC #0473, Mechanical and Aerospace Engineering, Bachelor of Science in Mechanical Engineering, effective Fall 2013. Review of submitted CC forms: CC #8370, Computer Engineering 202, Cooperative Engineering Training, effective Fall 2013. CC #8371, Electrical Engineering 202, Cooperative Engineering Training, effective Fall 2013. -

Vlab Academic – Access on the Web with Your PC/Mac/Smartphone/Tablet
Vlab Academic – Access on the Web with your PC/Mac/Smartphone/Tablet Goal – access to many academic applications from on or offsite using a Mac, PC or smartphone or tablet. Three Access Options 1. *New* Log in directly from a web browser 2. Download VMware on PC or Mac 3. Install free app in smartphone or tablet Examples of Accessible Clinical Applications General Open Vlabs – Adobe, Assistive applications, Claro Apps, Dragon, Echo, Kurzweil, JAWS, AppXtender, EndNote, Maple, Office, RStudio, SAS, SPSS, Stata, and many more. Business College Vlabs – Adobe, Arena, Creative Cloud, Digital editions, Office, Evergreen, EView, SPSS, Putty, SAP. Education Vlabs – Atlas.Ti, VLC, 7-zip, Adobe Reader, Adobe Flash, Facets, IBM AMOS 22, SPSS, IHMC Cmaptools, Inspiration 9, InspireData, Kidspiration 3, Paint.net, Quicktime 7, Shotcut, Winsteps, iTunes, VLC, NVivo. Engineering Vlabs – Adobe, AutoDesk Apps, ApsenTech, Bentley Software, SolidWorks, MSC.Adams, ASHRAE Psychrometrics, COMSOL, DipTrace, Eclipse for Java, Keil uVision, MATLAB, Minitab, MathCAD, Office, VisualStudio, WarGUI, WinEST College of Arts and Letters Vlabs – Adobe, Audacity, ArcGIS, ENVI, ERDAS, FragStats, Gauss, GeoDA, GeoGebra, Google Earth, GRASS GIS, QRS-II &GNE, Maple, Matlab, MikeTeX, MiniTab, Notepad++, Office, Python, Python Anaconda, Putty, QGIS, R, R Studio, SAS, SMath Studio, SPSS, Stata, TexMaker, TeXnicCenter, WinSCP, WinShell, Wolfram CDF Player, VLC Web Browser access – log in directly from a web browser on any PC or Mac 1. Visit vlab.utoledo.edu on your browser (Safari, Chrome or Edge) 2. Click the second icon “VMware Horizon HTML Access” 3. Type your UTAD Username and Password, then click “Login” 4. Click the icon “Clinical Live” then wait a couple of seconds as you are logged in Note: USB devices are not available when you log in via web browser. -

Information and Communication Technologies of Teaching Higher Mathematics to Students of Engineering Specialties at Technical Universities
Terekhova, N., Zubova, E. / Volume 9 - Issue 27: 560-569 / March, 2020 560 DOI: http://dx.doi.org/10.34069/AI/2020.27.03.60 Information and Communication Technologies of Teaching Higher Mathematics To Students of Engineering Specialties At Technical Universities Информационно-Коммуникационные Технологии Обучения Высшей Математике Студентов Инженерных Специальностей Технических Вузов Received: January 25, 2020 Accepted: February 29, 2020 Written by: Natalya Vladimirovna Terekhova213 ORCID : 0000-0003-4570-6261 https://elibrary.ru/author_items.asp?authorid=796649 Elena Aleksandrovna Zubova214 ORCID: 0000-0001-5666-2634 https://elibrary.ru/author_items.asp?authorid=802624 Abstract Аннотация Excessive anthropogenic pressure on land Высшие технические учебные заведения развитых resources in Ukraine leads to a deterioration of стран имеют значительные педагогические their quality, and consequently they lose their достижения и развитую систему подготовки специалистов инженерных направлений на основе potential. Human impact on the change of land системного использования средств ИКТ. В quality can be direct (by involving land lots in глобализированном пространстве высшего use, carrying out economic activities) and образования проблему повышения качества indirect (as a result of such activity, enhancing подготовки специалистов в отечественных вузах the natural degradation of soils). The tendency целесообразно решать посредством творческого of deterioration of the state of land resources использование опыта передовых вузов инженерного requires the subordination of land relations to the профиля. main goal – to ensure comprehensive protection Цель исследования заключается в осуществлении of this major national wealth of Ukraine. анализа процесса развития информационно- коммуникационных технологий (ИКТ) обучения Legal support for the protection of agricultural высшей математике студентов инженерных land is considered as a single complex of специальностей технических вузов. -
![High-Speed Programmable Photonic Circuits in a Cryogenically Compatible, Visible-NIR 200 Mm CMOS Architecture [Note] Mark Dong,1,2,6 Genevieve Clark,1,2 Andrew J](https://docslib.b-cdn.net/cover/6207/high-speed-programmable-photonic-circuits-in-a-cryogenically-compatible-visible-nir-200-mm-cmos-architecture-note-mark-dong-1-2-6-genevieve-clark-1-2-andrew-j-2576207.webp)
High-Speed Programmable Photonic Circuits in a Cryogenically Compatible, Visible-NIR 200 Mm CMOS Architecture [Note] Mark Dong,1,2,6 Genevieve Clark,1,2 Andrew J
High-speed programmable photonic circuits in a cryogenically compatible, visible-NIR 200 mm CMOS architecture [note] Mark Dong,1,2,6 Genevieve Clark,1,2 Andrew J. Leenheer,3 Matthew Zimmermann,1 Daniel Dominguez,3 Adrian J. Menssen,2 David Heim,1 Gerald Gilbert,2,4,7 Dirk Englund,2,5,8 and Matt Eichenfield3,9 1The MITRE Corporation, 202 Burlington Road, Bedford, Massachusetts 01730, USA 2Research Laboratory of Electronics, Massachusetts Institute of Technology, Cambridge, Massachusetts 02139, USA 3Sandia National Laboratories, P.O. Box 5800 Albuquerque, New Mexico, 87185, USA 4The MITRE Corporation, 200 Forrestal Road, Princeton, New Jersey 08540, USA 5Brookhaven National Laboratory, 98 Rochester St, Upton, New York 11973, USA [email protected] [email protected] [email protected] [email protected] Summary Recent advances in photonic integrated circuits (PICs) have enabled a new generation of “programmable many-mode interferometers” (PMMIs) realized by cascaded Mach Zehnder Interferometers (MZIs) capable of universal linear-optical transformations on N input-output optical modes. PMMIs serve critical functions in photonic quantum information processing, quantum-enhanced sensor networks, machine learning and other applications. However, PMMI implementations reported to date rely on thermo-optic phase shifters, which limit applications due to slow response times and high power consumption. Here, we introduce a large-scale PMMI platform, based on a 200 mm CMOS process, that uses aluminum nitride (AlN) piezo-optomechanical actuators coupled to silicon nitride (SiN) waveguides, enabling low-loss propagation with phase modulation at greater than 100 MHz in the visible to near-infrared wavelengths. Moreover, the vanishingly low holding-power consumption of the piezo-actuators enables these PICs to operate at cryogenic temperatures, paving the way for a fully integrated device architecture for a range of quantum applications. -

A Review on the Comparative Roles of Mathematical Softwares in Fostering Scientific and Mathematical Research
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Covenant University Repository Global Journal of Pure and Applied Mathematics. ISSN 0973-1768 Volume 11, Number 6 (2015), pp. 4937-4948 © Research India Publications http://www.ripublication.com A Review On The Comparative Roles Of Mathematical Softwares In Fostering Scientific And Mathematical Research Emetere Moses Eterigho1 and Sanni Eshorame Samuel2 1Physics Department, Covenant University, P.M.B. 1023, Ota, Nigeria 2Chemical Engineering Department, Covenant University, P.M.B. 1023, Ota, Nigeria [email protected] Abstract Mathematical software tools used in science, research and engineering have a developmental trend. Various subdivisions for mathematical software applications are available in the aforementioned areas but the research intent or problem under study, determines the choice of software required for mathematical analyses. Since these software applications have their limitations, the features present in one type are often augmented or complemented by revised versions of the original versions in order to increase their abilities to multi-task. For example, the dynamic mathematics software was designed with integrated advantages of different types of existing mathematics software as an improved version for understanding numerical related problems for advanced mathematical content (advanced simulation). In recent times, science institutions have adopted the use of computer codes in solving mathematics related problems. The treatment of complex numerical analysis with the aid of mathematical software is currently used in all branches of physical, biological and social sciences. However, the programming language for mathematics related software varies with their functionalities. Many invaluable researches have been compromised within the confines of unacceptable but expedient standards because of insufficient understanding of the valuable services the available variety of mathematical software could offer.