Session Planning-Detailed
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cultural Council & Films and Media Council Festival Name Host
Cultural Council & Films and Media Council Festival Name Host Institution Tentative Dates (for the Tentative 2014-15 year) Contingent size Cultural+FMC Carpe Diem IIIM Calcutta 31st January to 2nd 40 + 20 February Fiesta FMS Delhi 31st January to 2nd 40 + 20 February Alcheringa IIT Guwahati 30th January to 2nd 40 + 20 February Oasis BITS Pilani 24th to 28th October 40 + 20 Springfest IIT Kharagpur 26th to 29th January 40 + 10 Kolosseum KIIT Bhubneshwar 16th November to 17th 40 + 10 November Fluxus IIT Indore 7th to 9th February 40 + 10 Thrust NIT Warangal 27th to 29th December 40 + 10 Ignus IIT Jodhpur 27th February to 2nd March 40 + 10 Vaayu NMIMS Mumbai 29th November to 2nd 40 + 20 December Baptizer Christ University, 2nd February 25 + 10 Bangalore Parliamentary Debate RML NLU Lucknow 20th to 22nd October 15 + 0 Parliamentary Debate IIT Delhi 20th March to 22nd March 15 + 0 Mood-Indigo* IIT Bombay 23rd to 27th December 120 + 30 Rendezvous IIT Delhi 16th to 20th October 120 + 30 Chaos IIM Ahmedabad 28th to 31st December 40 + 10 Nihilanth (Inter IIT- Depends on IIT/IIM Depens on IIT/IIM which 30 IIM Quiz Meet) which wins the bid wins the bid Varchasva* IIM Lucknow 3rd to 6th October 30 + 10 Thomso IIT Roorkee 2nd to 4th October 40 + 20 Saarang IIT Madras 8th to 12th January 40 + 10 Pearl BITS Hyderabad 6th to 9th March 30 + 10 Xavotsav St. Xavier's College, 22nd to 24th January 0 + 10 Calcutta Jagaran Film Festival* Jagaran Media Around 25th July 0 + 50 Institute, Kanpur Technix IIT (BHU), Varanasi 24th to 27th January 0 + 10 Moments -
S.No.Hired on Student Name Stream Graduation Yearcompany Name
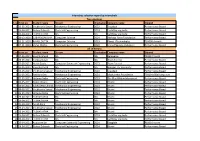
Internship selection report by Internshala Top selections S.no.Hired on Student name Stream Graduation yearCompany name Stipend 1 13-05-2021 Shubhashis Sanyal Mechanical Engineering 2022 Snapdeal Performance Based 2 26-04-2021 Bishnu Debnath Electrical Engineering 2024 EarthDay.org India Performance Based 3 26-04-2021 TUSHAR ATHA NA NA EarthDay.org India Performance Based 4 28-12-2020 SUBHANGANI JHA Computer Science 2024 Akshaya Patra Foundation Performance Based 5 26-11-2020 RAHUL DUTTA Computer Science 2019 Planet I Technologies ₹10000 /month 6 27-11-2018 Vishal Mishra Electrical Engineering 2020 United Nations Volunteer Performance Based All selections S.no.Hired on Student name Stream Graduation yearCompany name Stipend 1 24-05-2021 Soumik Ghosh NA NA Believable ₹1000 /month 2 24-05-2021 Sudipta Dwari NA NA Team Everest Performance Based 3 22-05-2021 Nitish Gupta Computer Science & Engineering 2023 Team Everest Performance Based 4 22-05-2021 Soumik Ghosh NA NA Humans For Humanity Performance Based 5 13-05-2021 Shubhashis Sanyal Mechanical Engineering 2022 Snapdeal Performance Based 6 11-05-2021 Pathikrit Das Mechanical Engineering 2021 Muskurahat Foundation ₹5000-10000 lump sum 7 07-05-2021 Hritama Sinha Electrical Engineering 2023 The Blue Ribbon Movement Performance Based 8 06-05-2021 Rupan Biswas Electrical Engineering 2024 Bhumi Performance Based 9 06-05-2021 Subhadeep Chanak Mechanical Engineering 2023 Bhumi Performance Based 10 06-05-2021 Shubhashis Sanyal Mechanical Engineering 2022 Bhumi Performance Based 11 06-05-2021 Hritama -

Josephitenewsletter
1 JosephiteNewsletter Volume 13 | Issue 3 | St Joseph’s College (Autonomous), Bangalore- 27 | January - March 2020 birth certificates that are the to confront this emergency daily obsessions of the powers together, and find innovative that be, have sharper relevance ways to take our unfinished work now in the wake of the pandemic forward. caused by the coronavirus. We see markets crashing, people When we look at our institution’s in panic, and misinformation history, we will find many everywhere. instances in the past when the Josephite spirit has been tested, In these dark times, we must each and has responded in abundance. find an internal compass that This, too, is an opportunity for us must guide us. If we look within, to forget small differences and we will find the discernment that rise to the challenge of being will guide us to the necessary human. next step. At the fag end of the semester, at a time reserved for Principal’s Note goodbyes to those leaving the institution, we must instead focus In my last message, I spoke of on staying safe, and on the well- how simple acts of nature can being of our loved ones. remind us of the fragility of human presence on this planet. We do not know what the next Those remarks, made in the few weeks might bring, but let context of focusing on serious us resolve first to rally around the issues like climate change rather institutional ideals of faith and than the trivia of ancestry and toil. Let us be strong in our resolve 1 2 2 College Events Republic Day Protocol in charge: Mr. -
The Insight Ouarterly © 2013, for Permissions to Reproduce Any Content Featured in This Edition, Please Reach Us at [email protected]
IIT BOMBAY STUDENT MEDIA BODY | ESTABLISHED 1997 INSIGHTIITB.ORG | VOLUME 15 · ISSUE 3 | APR 2013 | PAGES 10 THE INSIGHT OUARTERLY © 2013, FOR PERMISSIONS TO REPRODUCE ANY CONTENT FEATURED IN THIS EDITION, PLEASE REACH US AT [email protected] We bring to you Insight brings to you Alumni share with 04structure of student 06 behind the scene 08 us their perspectives bodies across several IITs stories about IITB's triumph on the placement scene at along with JNU and DU at this year's Inter IIT IITB and their first jobs Discerning the Election Rules and Procedures ARCHANA DAS, SANKET DABADE, SARAT CHANDRA, SIDDHARDHA SUKKA, SIDDHARTH BHANDARI, SMRITI MITTAL, SUMAN RAO Do the candidates on election day know how many Closed Electorates for Institute Secretaries votes they are trailing or leading by? What does the Should Online Campaigning be election committee do with a blacklist? How is the Banned? An improvisation over the last elections was the intro- election committee formed? InsIghT probes the facets duction of closed electorates for Institute Secretary which form the hallmark of the even semester - the With an almost two-fold increase in student pop- posts. The election committee felt that a large number Institute General Elections. ulation and the recent decrease in campaigning of these posts directly concern only a small section of time, it has become very difficult to reach out people. The elected GS anyway oversees broader poli- The Web Interface to the electorate. A past GS candidate anony- cies. Hence it doesn’t make sense for these candidates mously told InsIghT, “We can at best cover about to canvass across the institute. -

Cultural Council End Term Report (2013-2014)
CULTURAL COUNCIL END TERM REPORT (2013-2014) Submitted by Rishav Garg, General Secretary, Cultural Council Introduction The Cultural Council under my supervision started its activities from 1st April’ 2013. In the first semester of my tenure a number of events were organized and a great response was received from the IIT-K junta as well. The council mainly functions through six clubs to conduct various activiites. The structure of the Council Council is given below with the names of club coordinators. Dance Club Dramatics Quiz Club Club Cultural Council Literary Music Society Club Fine Arts Club Most of the activities of the council fall under these clubs but there are some events that are directly seen by the General Secretary which are listed below. For these events separate coordinators are selected through proper interviews. Freshers' The Stage is Impressions Galaxy Night Yours The details of the activities by different clubs are given on the next page: Dance Club SALSA AND JAZZ WORKSHOP Professionals: By Caroline D’Souza and Jishan Ali, Kanpur Dance Club began its tenure with the most awaited workshop – The Salsa and Jazz Workshop. It became an instant hit and saw a participation of over 70 people which included both UG and PG students as well as the Faculty members. The workshop went over a period of a fortnight and the participation didn’t come down till the last day. HIP HOP WORKSHOP Professionals: External Force Crew, Pune This workshop was taken by three individuals of the Crew all known for different styles. They taught Krump, Breaking, Popping, House and Locking (all different styles oh hip hop) and also set a choreography which was used in the competitions held in the fests of IIM L,IIT K and are going to be used in IIT B and IIM A. -

Indian Institute of Technology Kanpur
INDIAN INSTITUTE OF TECHNOLOGY KANPUR O ON BR CHUR TI E A 20 M 1 R 9 O - F 2 0 N I Counselling Service Your home away from home Gallery About CS The primary objective of the Counselling What is counselling? How do you access the Counselling Service, IIT Kanpur, is to support you during Many students encounter problems that either Service at IIT Kanpur? your stay at IIT Kanpur. At the Counselling cannot be resolved easily or the usual ways of Service, we provide you with emotional handling the problems aren’t working well for 1. If you would like to see a counsellor, and academic support with the help some reason. For example, they might have please feel free to mail a counsellor at of professional counsellors, an empathic discovered that talking to friends or family [email protected] to set up an appoint- and dedicated group of students and members about their concerns is either fruitless ment. faculty members. or unsatisfying. Counselling offers you the 2. You can also talk to your Student Guide/ Here, we provide some tips for a successful opportunity to unburden your mind with an Core team member/ Coordinator/ Instruc- stay here. objective person. They can be instrumental in tor, who will then direct you to a counsel- Entering a new environment can be excit- helping you in learning new skills and can also lor. ing, challenging and sometimes unnerving. assist you in looking at situations from a differ- 3. If you have already sought counselling Some of the commonly faced problems ent perspective so that you will be more capa- elsewhere or are under psychiatric medica- include the following. -

Top 10 Engineering College Fests in India | Shiksha.Com
Top 10 engineering college fests in India Updated on: Apr 22, 2014 Chhavi Sharma 10.5K Views Today we talk about one of the most happening as well as (often termed to be) the most awaited event of the year in almost every student’s life. Yes! We are talking about “college fests”. Almost every semester of a student’s college life is spent in day dreaming and saving up for this event. After all, with so many institutes Disclaimer: This PDF is auto-generated based on the information available on Shiksha as on 04-Jun-2020. performing in various events you wouldn’t want to look or sound stupid in front of all the good looking and interesting people of your generation. The college fest is one event which easily takes away all the study pressure and for these 3-4 days in a year, students tend to really have fun and party hard. No doubt every college student feels that their annual fest is the place to be. But to point out facts we did a little research of our own to find out which are the coolest college fests that take place in India. MoodI Conducting Institute: IIT Bombay Commonly referred to as MoodI or MI, Mood Indigo is the annual cultural fest of IIT (Indian Euphoria performs at MoodI Institute of Technology) Bombay which was initiated by a group of students in 1971. Conducted every year in December Disclaimer: This PDF is auto-generated based on the information available on Shiksha as on 04-Jun-2020. -

Newspaper Clips October 23, 2013
Page 1 of 11 Newspaper Clips October 23, 2013 The Economic Times Page 2 of 11 Page 3 of 11 The Telegraph Page 4 of 11 Indian Express Page 5 of 11 Page 6 of 11 Indian Express Page 7 of 11 Antaragni' 13 @IIT Kanpur: Informals A cultural festival which attracts a whopping crowd of over 30,000 students from more than 200 colleges all over the country is back and will be organised from 24th to 27th October this year. With each passing year the thrill for the four day festival only seems to increase. With popular and happening hangout spots having loads of informal activity all through the night, one thing is for sure, that these four days are the most cherished. Apart from all the professional performances and events, we have lads of informal fun in all throughout Antaragni in a place we call, the Mall. The happening hip-hop hub, held in SAC (Student Activity Centre) ground hosts an audience of more than 10,000 people in and around all the 4 days of the festival. It is the backbone of the festival, source of constant fun and on-the-spot activities to keep the crowd interested and coming back. It has a number of fun, wacky and spontaneous events and offer loads of entertainment to the participants and the crowd alike. Activities are a pot-pourri of impromptu activities and events ranging from blind dates to wacky dares. It's all happening here! Just let the cheese slide of your cracker. Get yourself a date or play stall games and make money. -

Internshala Top Selections Graduation Company S.No
Internship selection report by Internshala Top selections Graduation Company S.no. Hired on Student name Mobile no. Email address Stream year name Stipend mohitchhatijam Electrical Performance 1 17-02-2021 Mohit Chhatija 9057556364 [email protected] Engineering 2021 Teach For India Based ashok.cse.jangi Computer ₹15000 lump 2 13-01-2021 Ashok Jangid 9116828332 [email protected] Science 2021 Neha Yadav sum dreambigworks Distil mart11@gmail. Electrical Assessments 3 24-12-2020 Deepak Kumar 6377386412 com Engineering 2020 LLP ₹10000 /month jyotipanwar110 Information Innovators And ₹10000-20000 4 08-09-2020 Jyoti Panwar 7733965144 @gmail.com Systems 2018 You /month Girish Kumar choudharygr99 Electrical Aine Info Tech 5 27-04-2020 Jat 9413833124 @gmail.com Engineering 2021 Private Limited ₹15000 /month Rapido - India's Naveen nav10121938@ Largest Bike ₹2000-5000 6 21-08-2019 Agarwal 8824409754 gmail.com Marketing 2017 Taxi /month IDBI Federal Life ankitkumar355 Insurance [email protected] Electronics and Company 7 12-04-2019 Vaibhav Singhal 9079837683 om Communication 2022 Limited ₹10000 /month ga27516@gmail Computer United Nations Performance 8 27-11-2018 Arnav Saxena 9079253535 .com Application 2020 Volunteer Based The Raghvendra raghvendras996 Information Madpackers 9 11-08-2018 Singh 8290387657 @gmail.com Technology 2018 Hostel ₹12000 /month Naveen nav10121938@ ₹2000 /month + 10 07-06-2018 Agarwal 8824409754 gmail.com Marketing 2017 Bajaj Finserv Incentives mitulmaander1 [email protected] Civil Performance 11 09-04-2018 Mitul Maandar 7041388448 m Engineering -

Birla Institute of Technology
BIRLA INSTITUTE OF TECHNOLOGY MESRA, RANCHI FIFTY EIGHTH MEETING OF THE BOARD OF GOVERNORS MINUTES Date: 26th Feb, 2019 Time: 3.00 P.M. Place: Birla Institute of Technology Mesra RANCHI – 835215 BIRLA INSTITUTE OF TECHNOLOGY, MESRA, RANCHI MINUTES FIFTY EIGHTH MEETING OF THE BOARD OF GOVERNORS Held at 3 PM on 26th February, 2019 Birla Institute of Technology (BIT) Mesra, Ranchi – 835215 ……………………………………………………………………………………………… MEMBERS PRESENT Shri CK Birla - Chairman Dr. M.K. Mishra - Member Vice Chancellor Shri S.N. Agarwal - Member Nominee of HCT Dr. P. Ghosh - Member Nominee of General Council Mr. Niranjan Kumar - Member Nominee of Commissioner, South Chhotanagpur Division Dr. (Mrs.) S. Shivani - Member Institute Faculty Dr. Priyank Kumar - Member Institute Faculty Also present: Shri Yogesh Goenka - Hony. Treasurer Special Invitee Dr. A.P. Krishna - Registrar (Actg.) Secretary, BoG Leave of absence was granted to the following members who could not attend the meeting: Dr. Ajit K. Chaturvedi - Member Nominee of AICTE Director (Central Universities) - Member Nominee of MHRD, GoI Dr. (Mrs.) Renu Batra - Member Nominee of UGC Shri Madhavan Nayar - Member Nominee of HCT Shri Aroop Zutshi - Member Nominee of General Council Dr. Arup Roy Choudhury - Member Nominee of General Council Shri Rohit Saboo - Member Nominee of HCT Shri Satendra Singh - Member Nominee of the Chancellor Shri Rajesh Sharma - Member Secretary, DHTES, GoJ 1 58.01 CONFIRMATION OF MINUTES The Minutes of 57th meeting of the Board of Governors (BoG) of the Institute were confirmed. [Annexure I] 58.02 ACTION TAKEN REPORT ON MATTERS CONSIDERED IN THE LAST MEETING The follow-up actions for implementation of items considered in the 57th meeting of the Board were noted: Item no. -
![Journée Internationale Inde [Lecture Seule]](https://docslib.b-cdn.net/cover/7644/journ%C3%A9e-internationale-inde-lecture-seule-8317644.webp)
Journée Internationale Inde [Lecture Seule]
CONFERENCE INDE Journées Internationales – 22/10/2015 CONFERENCE INDE • Animateur • Dr Marie-Pierre FAVRE, Directeur des Relations Internationales [email protected] L’INDE India , officially the Republic of India is a country in south asia. It is the 7th country by area, the 2nd populous country with 1.2 billion people. Diverse culture, all religions presents. The land of dreams and romance, of fabulous wealth and fabulous poverty, of splendour and rags, of palaces and hovels, of genis and giants and Aladdin lamps, …………….. the one land that all men desire to see, and having seen once, by even a glimpse, would not give that glimpse for the shows of all the rest of the world combined. ---- Mark Twain 10/25/2012 5 Land of many religions Unity in Diversity! 10/25/2012 6 Languages ? • States on linguistic grounds • Official languages : Hindi and English • 18 regional(official) languages • 122 prominent languages! + Dialects! 10/25/2012 7 Academics 1. India 2. IITs (Including IITD) 3. Higher Education Numbers • 17,000,000 Students pursuing higher studies. • Over 33,000 Colleges in India. • India's higher education system is the second largest in the world. • Students and colleges increasing exponentially each year. Education in India • Undergraduate Studies – 14 years • Technical Graduation (B.Tech) – 4 Years • Other Fields (Arts, Commerce) – 3 Years • Post Graduation – 2 Years • Some Institutes (Including the IITs) offer 5 year programmes with an Integrated Degree (similar to INSA) • INSA collaborates with IITs(Delhi, Bombay, Kampur, Chennai) IITs • The IITs were started as centres of excellence to promote scientific advancement. -

Volume 3, Issue 1 of the Institute Newsletter
Inside this Issue DoRA's Interview on Centenary Celebrations Another giant leap : BANARAS HINDU UNIVERSITY Harnessing the power of solar energy The Transfiguration of MAIN LIBRARY, IIT (BHU) Getting to know the new Deans In Talks : Vivifying your career Innovating for change : Modification in the design of Jetty A vision turned into reality : Academia to the Field Revisiting a visionary : Professor TR Anantharaman Faculty Achievements Invited Talks Publications List of Sponsored Projects List of MOUs Hindi Pakhwara Training Programmes Science and Technology Council Essay Writing Competition Volume 3, Issue 1 Student Achievements The Institute Newsletter Spardha'17 February 2018 Gymkhana's Activities Kashiyatra 2018 2 Editor's Desk We are glad to present to you the from brickfields in the state. In organised to understand student fourth edition of the Institute another article, we commend the perspectives on how the ensuing Newsletter. 2018 is an exceptional efforts of the members of the team changes have affected the Institute, year for IIT (BHU), as it marks the from the Civil Engineering and one of the winning entries has beginning of the centennial department, who are working been published here. celebrations of the Institute. While the towards modernising jetties used in We would like to express our details of the programme are still water transportation. Another gratitude towards the entire faculty being worked out and will be significant step towards sustainable and student fraternity, and to all the covered in subsequent editions of this development is the installation of Deans and their respective offices, for publication, we take some time in this solar panels across various buildings t h e i r va l u a b l e i n p u t s a n d issue to explore some of the reasons encompassing the Institute.