Cliff : the Automatized Zipper
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
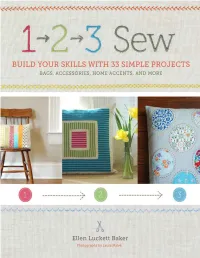
1, 2, 3 Sew: Build Your Skills with 33 Simple Sewing Projects
Text copyright © 2011 by Ellen Luckett Baker. Photographs copyright © 2011 by Laura Malek. Illustrations copyright © 2011 by Ellen Luckett Baker. All rights reserved. No part of this book may be reproduced in any form without written permission from the publisher. ISBN 978-1-4521-0481-2 The Library of Congress has previously cataloged this title under ISBN 978-0-8118-7649-0 Designed by Vivien Sung Typesetting by Melinda Macfadden Photo styling by Ellen Luckett Baker Chronicle Books LLC 680 Second Street San Francisco, CA 94107 www.chroniclebooks.com Contents Introduction Getting Started Choosing Fabric 15 Essential Tools CHAPTER 1: DINING AND DISHES Fruit Tea Towels Hooked on Napkins Set the Table Runner CHAPTER 2: PILLOWS Skyline Pillow Concentric Squares Pillow Circles Floor Pillow CHAPTER 3: ORGANIZERS Pencil Holder Storage Cube Craft Caddy CHAPTER 4: QUILTED KITCHEN Ticking Stripe Hot Pad Plaid Coasters Rippled Place Mats CHAPTER 5: TOTES Market Tote Doodle Bag Lunch Sack CHAPTER 6: POUCHES Grid Glasses Case Polka Dot Pouch Lawn Cosmetic Bag CHAPTER 7: HANDBAGS Pintuck Clutch Tiered Bag Pleated Satchel CHAPTER 8: ACCESSORIES Eyelet Headband Tea Towel Apron Yo-yo Scarf CHAPTER 9: REVERSIBLE FOR KIDS Play Your Way Cape Change Your Mind Skirt Mix It Up Smock CHAPTER 10: FOR BABY Sampler Burp Cloths Initial Blanket Sunshine Bib CHAPTER 11: BLOCKHEAD ANIMALS Mouse Pincushion Blockhead Puppets Bunny Softie Basic Embroidery Stitches Patterns Sewing Glossary Resources Acknowledgments Index SPECIAL BONUS PROJECT Available online! Visit www.chroniclebooks.com/123Sew for the instructions INTRODUCTION I started sewing eight years ago. Before then I never considered myself a crafty person, though I always had an interest in art and design. -

Pattern # 179 Dolly Molly Page 1 of 15
Pattern # 179 Dolly Molly Page 1 of 15 http://www.thesimplelifecompany.com 02/09/2017 Version ©Simple Life Pattern Company 2017 Pattern # 179 Dolly Molly Page 2 of 15 Size Charts 14" 18" Chest 7" 12” Waist 7" 12” Finished Length top shoulder to hem 14" 18" Top 5” 6.5” Dress 7” 8.5” Maxi 11” 12.5” Fabric Requirements (Yards – based on 44/45” fabric) Bodice & Pintuck Size Top Dress Maxi Collar Bias Placket Lining Placket 14" 1/8" ¼" ¼" ¼" 4" square 1/8" 4” square 18" 1/8" ¼" ¼" ¼" 4" square 1/8" 4” square Additional Notions Needed • 1 Kam Snap or small fastener for back closure • Buttons for embellishing the pleated placket (optional) • Fabric Marker/chalk (optional) http://www.thesimplelifecompany.com 02/09/2017 Version ©Simple Life Pattern Company 2017 Pattern # 179 Dolly Molly Page 3 of 15 Tips & Notes: • Please read through the entire pattern before beginning. • All seam allowances are 1/4”, unless otherwise stated. • For a professional look, press your garment when instructed. • When instructed, topstitch your garment. This will give you professional results. TIP: I always increase my stitch length to 3.0 – I feel a longer topstitch length looks better. If you do this, be sure to put your stitch length back to 2.5 for regular sewing. • Gathering can be tedious - I find it easiest to turn my tension to the highest tension and my stitch length to the longest stitch. Before you start sewing, pull up the bobbin thread and pull the top thread and bobbin thread out so you have about a 5” tail before you sew. -

United States Patent 19 11, 3,977,025 Horan (45) Aug
United States Patent 19 11, 3,977,025 Horan (45) Aug. 31, 1976 54) BELT CLOSURE FOR STERILE BACK SURGICAL GOWN OR THE LIKE Primary Examiner-Werner H. Schroeder 75 Inventor: Robert T. Horan, Tucson, Ariz. Attorney, Agent, or Firm-Quarles & Brady 73). Assignee: Will Ross, Inc., Milwaukee, Wis. 57 ABSTRACT 22 Filed: Dec. 24, 1975 A sterile back surgical gown is closed by side and back (21 Appl. No.: 644,045 belts tied at the user's side. The back belt is designed to be passed to the wearer without loss of sterility; and is stored in a pocket with its free end in an envelope (52) U.S. Cl............ 2/114; 2/51; that extends into the pocket and is deadfolded to re 2/DIG. 7, 206/440 main in proper position, and that has an exposed 51 Int. CI.'................ A41D 13/00 transparent side so that an assistant can see the belt 58) Field of Search..................... 2/51, 114, DIG. 7; end. The fixed end of the back belt and one end of an 206/278, 439, 440 inner tie are anchored by respective parts of a snap closure that releasably holds a closure panel in open (56) References Cited position. The side belt is in a storage sleeve with a free UNITED STATES PATENTs end projecting forwardly and a loop extending rear 3,259,913 7/1966 Tames..................................... 21114 wardly, and there is a Y-reinforcing strip connected 3,594,818 7/1971 Planner................................... 21114 between the side belt and gown to allow the belt to be 3,648,290 3/1972 Hartigan... -

News You Can Use
News You Can Use LivingSoft Subscriber Newsletter | Volume 13 Dress Shop 7 Released! Become a Fashion Designer at home! With Dress Shop 7, you too can be a fashion designer, starting with a pattern that fits and making something extraordinary to wear! On October 20, 2006, Dress Shop 7 was released, exactly two years after Dress The NEW Design Elements in Dress Shop 7 Shop 6 was released. Dress Shop 7 includes more patterns, more tools, more The Dress Shop 7 upgrade necklines, more collars, more sleeves, includes many new features, but and more closure options than ever this article will address only the before. And, upgrading is a bargain. If new design elements: necklines, you do not yet own the Dress Shop collars, closures, sleeves, waist Fashion Design tools, upgrading to Dress Shop 7 gives offset and Pattern Conversion you over $200 worth of design tools for just the $60 tools. Dress Shop 7 Pro also upgrade price. And, you get more than a hundred additional includes ALL of the fashion patterns, plus the new necklines, collars, closures, and design tools as well. sleeves to boot. Necklines: Some necklines were added to Dress Shop If you do own any of the prior tool products, you get a for just one or 2 named patterns. The Cami neck for discount on the upgrade for each tool you own. Either way, instance was available only for the Camisole and you you win! could use it on just that one pattern from the Lingerie category. Now, this neckline may be used on fitted Upgrading from Dress Shop 6 to Dress Shop 7 costs $60, shirts, shells, sheaths, and jumpers for a wide less $10 for each Dress Shop Tool product you own assortment of garment designs. -

GEROMED 01 Mobile Knee Brace Code: SRT 318
GEROMED 01 Mobile knee brace Code: SRT 318 Indications It is used in the crick, luxation, post-fracture, lateral instability of the knee, inflammatory processes. Recommended both as orthopedic treatment and postoperative. Description Open at the back, made of textile, provided with: • 4 spring-type metal splints, 2 on each side • patellar support (polyethylene foam). Hook and loop fastening on the backside. Length: 26 cm. The orthosis is a support for the knee joint, the 4 spring-type metal splints, 2 for each side providing stability and safety in use. Due to its particular shape, it can be used also in case of a deformed knee. The compression can be adjusted by the back closure system. Composition The orthosis is made of a three-layer laminated textile: • Velutino - The polyamide fiber has a high resistance to chemical and biological agents, resists abrasion and does not absorb water. Product details • Moltopren (MTP) - air-permeable open-cell polyurethane foam (airflow in both directions is inversely proportional to foam density) with high moisture • open orthosis on the absorbing properties. backside • Jersey cotone SOFT - 100% cotton or cotton with spandex - elastane (for • hook and loop fastener increased elasticity). SOFT The code for the balsamic treatment of the cotton fabric to provide softness to the touch and to avoid skin irritation. Properties of the fabric The laminated ensemble behaves like a moisture regulator: it keeps the body dry by transferring sweat to the exterior via the PU foam. • patellar support made of polyethylene foam • spring-type metal splints airflow water transfer Available sizes Sizes 1 2 3 4 5 Knee circumference (cm) 33-36 36-39 39-42 42-45 45-49 Code SRT318M1 SRT318M2 SRT318M3 SRT318M4 SRT318M5 The circumference of the knee is measured at the middle of the knee cap www.triamed.ro TRIAMED Technology for your health. -

Clothing of Pioneer Women of Dakota Territory, 1861-1889
South Dakota State University Open PRAIRIE: Open Public Research Access Institutional Repository and Information Exchange Electronic Theses and Dissertations 1978 Clothing of Pioneer Women of Dakota Territory, 1861-1889 Joyce Marie Larson Follow this and additional works at: https://openprairie.sdstate.edu/etd Part of the Fiber, Textile, and Weaving Arts Commons, and the Interior Design Commons Recommended Citation Larson, Joyce Marie, "Clothing of Pioneer Women of Dakota Territory, 1861-1889" (1978). Electronic Theses and Dissertations. 5565. https://openprairie.sdstate.edu/etd/5565 This Thesis - Open Access is brought to you for free and open access by Open PRAIRIE: Open Public Research Access Institutional Repository and Information Exchange. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of Open PRAIRIE: Open Public Research Access Institutional Repository and Information Exchange. For more information, please contact [email protected]. CWTHIFG OF PIONEER WOMEN OF DAKOTA TERRI'IORY, 1861-1889 BY JOYCE MARIE LARSON A thesis submitted in partial fulfillment of the requirements for the degree Haster of Science, Najor in Textiles, Clothing and Interior Design, South Dakota State University 1978 CLO'IHING OF PIONEER WOHEU OF DAKOTA TERRITORY, 1861-1889 This thesis is approved as a creditable and independent investigation by a candidate for the degree, Master of Science, and is acceptable for meeting the thesis requirements for this degree. Acceptance of this thesis does not imply that the conclusions reached by the candidate are necessarily the conclusions of the major department. Merlene Lyman� Thlsis Adviser Date Ardyce Gilbffet, Dean Date College of �ome Economics ACKNOWLEDGEr1ENTS The author wishes to express her warm and sincere appre ciation to the entire Textiles, Clothing and Interior Design staff for their assistance and cooperation during this research. -

Style Set 2 for Garment Designer
Style Set 2 for Garment Designer Welcome to Style Set 2. This set provides you with 50+ additional style elements that will mix and match with the original Garment Designer & Style Set 1 styles . Key to Style Information/Illustrations Red Lines/Curves: Show you new points involved in the style, plus the segments (either straight or curved) that exist with the style. Use this information to assist you in choosing styles for custom design ideas. Black/Red Lines: Show you the pattern built through the combination of style menus. Combination: The style menu options chosen for the style shown. Use these as inspiration. Illustration: Further inspiration. Comments: Helpful information about the style. Thanks to Jon Balcalski, Mesa College (San Diego) student, who assisted with the illustrations as part of his Honors Computer Fashion course. Style Set 2 © 2002, All Rights Reserved Susan Lazear, Cochenille Design Studio Encinitas, CA 92023-4276 www.cochenille.com [email protected] 1 Installation: Double-click on the StyleSet2Installer file found on the CD you have received with this package. The installa- tion will happen automatically. Various files will be updated in your Garment Designer folder. Note: 1. The Style Set 2 installation will update your Garment Designer application file. It will also update your Style Set 1 (SS1) file, should you have SS1 installed. 2. It is highly recommended that you only have one copy of Garment Designer on your computer. This will avoid confusing the Installer. 3. With the millions of combinations now available in Garment Designer (with Style Set 1 and Style Set 2), it is likely that there is a style combination that simply cannot work, or doesn’t work properly. -
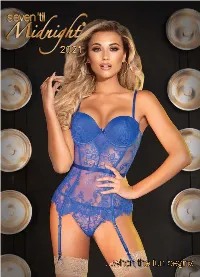
Lightseven 'Til Midnight, Or Rather, the Hours
Spot Spot SEDUCTION Seven ‘til Midnight, or rather, the hours that conjure up titillating fantasies lightand mischievous rendezvous, is when the fun begins. The sensual aesthetics of Old Hollywood established that a woman with curves can be a sexy seductress. Seven ‘til Midnight’s 2021 collection reimagines classic silhouettes from this Golden Age with luxurious fabrics, sparkling details, and lustrous colors in daring cuts. Embrace the art of seduction by playing the role of the passionate leading lady in lace, the mysterious temptress in lamé, or the glamorous vixen in strappy ensembles. The bedroom is her theater and she is the ultimate scene stealer. STYLE & SUSTAINABILITY Seven ‘til Midnight continues to be an innovator in style and sustainability. In keeping with Seven ‘til Midnight’s environmental initiative, we are committed to making an impact and change in the growing global problem of environmental pollution and waste. We will do our part by making a switch to new eco-friendly packaging that consists of recycled paper and biodegradable polybags. In light of the ever growing green awareness movement, we will continue to look into new technologies and challenge ourselves in an effort to do better. Contents NON PACKAGED GLAMOUR GIRL (Hanging Lingerie) 6 LEADING LADY (Hanging Lingerie) 48 GOLDEN AGETABLE (Hanging OF Lingerie) CONTENTS 74 STARSTRUCK (Loungerie) 84 FLASHING LIGHTS (Hanging Lingerie) 94 PACKAGED SUPERSTAR (Boxed Lingerie) 110 CAMERA READY (Boxed Lingerie) 126 SPOTLIGHT (Boxed Lingerie) 134 ROLEPLAY (Bedroom Costumes) 150 MIDNIGHT MUST HAVES LOVE SCENE (Panties) 159 SCENE STEALER (Panties) 180 TIGHT SHOT (Garters) 201 BODY LANGUAGE (Bodystockings & Legwear) 208 EXTRA EXTRA (Accessories) 226 SALES TOOLS 244 PAGE MARGIN COLOR KEY NON PACKAGED LINGERIE - GOLD PACKAGED LINGERIE - RED MIDNIGHT MUST HAVES - BLUE 4 Add more leaves & extend background 5 glamour GIRL 6 glamour GIRL Three piece bra set. -
Stormtech Spring 2020
SPRING 2020 NEW STYLE GUIDE WWW.STORMTECHUSA.COM SPRING 2020 URBAN COLLECTION COMMUTING ESSENTIALS BUSHWICK QUILTED JACKET BLUERIDGE DENIM SHIRT TORCELLO CREW NECK TEE DARWIN HAT BXQ-1 | BXQ-1W SFD -1 | SFD-1W TG-1 | TG-1W BRC-3 ROAD WARRIOR COMPUTER PACK CUPERTINO RFID PASSPORT WALLET CMT-3 PWX-1 BUSHWICK QUILTED JACKET BXQ-1 | BXQ-1W When the temperature unexpectedly dips, this quilted polyfill jacket with a snap closure center front zipper and zippered hand warmer pockets is guaranteed to keep you warm and protected from chills. When the clouds close in, go undercover with the adjustable attached hood and draw the adjustable waist in on the women’s style. Center Front Zipper with Snap Closure Placket For clean styling and top to bottom secure fit Diamond Quilted Internal Chest Pocket Polyfill Allows for the secure Diamond construction and practical storage of designed to secure smaller personal items polyfill in place while staying on trend 3/4 Length Offers added protection BXQ-1: Earth from the elements in variable conditions BXQ-1W: Indigo (Women’s) NEW BUSHWICK QUILTED JACKET BXQ-1 | BXQ-1W MSRP $160.00 FEATURES: • Internal Chest Pocket • Diamond Quilted Polyfill • Cuff Plackets with Button Closure • Center Front Zipper and Snap Closure Placket • Flapped Chest Pockets with Snap Closures (M’s) • Hand Warmer Pockets (M’s) • ¾ Length (W’s) • Zippered Hand Warmer Pockets (W’s) • Kick Pleat (W’s) • Adjustable Attached Hood (W’s) • Decoration Access • Adjustable Waist (W’s) TECHNOLOGY: DECORATIONS: +10˚C (50˚F) COLD TO -10˚C (14˚F) FABRICATION: -

PDF Document
Brownsville ISD Purchasing Bid Information Contact Information Ship to Information Bid Owner Connie Alvear Senior Buyer Address 1900 Price Road Address 3760 Robindale Rd Email [email protected] Phone Brownsville, TX 78521 Brownsville, TX 78526 Fax Contact Connie Alvear Senior Buyer Contact Department Department Bid Number 19-023 Building Building Title Student Uniforms for Floor/Room 107 Floor/Room Career/Technology & Instructional Telephone (956) 548-8361 Telephone (956) 548-8375 Program District-Wide Fax Fax Bid Type BID Email [email protected] Email Issue Date 02/17/2019 Close Date 3/21/2019 10:00:00 AM (CT) Supplier Information Supplier Notes Company Name Contact Name Address Telephone Fax Email By submitting your response, you certify that you are authorized to represent and bind your company. Signature Date / / Bid Notes Bid Activities Bid Messages Bid Attachments The following attachments are associated with this opportunity and will need to be retrieved separately # Filename Description Header 2019 required documents.pdf REQUIRED DOCUMENTS/MUST BE SUBMITTED WITH BID/PROPOSAL Bid Attachments Requested The following attachments are requested with this opportunity # Required Specified Attachment 1 YES Form 1295 : Form 1295 must be signed and submitted. 2 YES Required documents must be submitted with this solicitation : Please upload the required documents with all signatures. 19-023 - Page 1 of 12 Bid Attributes Please review the following and respond where necessary 19-023 - Page 2 of 12 Line Items # Qty UOM Description Response 1 1 EA Scrub - Unisex scrub V-neck top. Reversible. Breast pocket on both sides. Longer length. 65% poly/35% cotton with soil release. -

It's All in the Details: Making an Early 19Th Century Ball Gown by Hope Greenberg
It's All in the Details: Making an early 19th Century Ball Gown By Hope Greenberg In 1775, the year of Jane Austen’s birth, women wore gowns with a fitted bodice, the waist at or below the natural waistline, and full skirts over a visible, often ornate, petticoat. They were made in a variety of heavy silks, cotton or wool. By the time she had reached her late teens the ornate gowns were being replaced by simple, lightweight, often sheer cotton or silk gowns that reflected the ideals of classicism. This guide provides images and details to consider when creating an early 19th century ballgown. The examples provide a general guide, not an exact historic timeline. Fashion is flexible: styles evolve and are adopted at a different pace depending on the wearer's age, location, and economic or social status. These examples focus on evening or ball gowns. Day dresses, walking dresses, and carriage dresses, while following the same basic silhouettes, have their own particular design details. Even evening gowns or opera gowns can usually be distinguished from ball gowns which, after all, must be designed for dancing! By focusing on the details we can see both the evolution of fashion for this period and how best to re-create it. What is the cut of the bodice, the sleeve length, or the height of the bustline? How full is the skirt, and where is that fullness? What colors are used? What type of fabric? Is there trim? If so, how much, what kind, and where is it placed? Based on the shape of the gown, what can we tell about the foundation garments? Paying attention to all these details will help you create a gown that is historically informed as well as beautiful. -

163 Sophia Inst 11X17 New.Cdr
163 Revised: April 2018 seam allowance with the Seams Great using a long, wide zig zag stitch. Sophia On heavier fabrics including corduroy or velvet it is more difficult to fold the 163 General Sewing Information Seams Great in place. Place the edge of the Seams Great on the stitching line of Carefully READ ALL INSTRUCTIONS before beginning project. the seam and zig-zag in place. Then fold the Seams Great over the seam allowance and zig-zag again inclosing the seam allowance. Sophia has been redesigned! DO NOT CUT PATTERN SHEET. Trace onto tracing paper each pattern New Fit and Lengths, New Designs and More piece as needed. Be sure to mark your tracing with grain lines, fold lines and other Machine Finished Seam Allowance: Wide zig-zag stitch, three-step zig-zag information as given on pattern piece. These may be stored in small zipper seal stitch or serger stitch may also be used to finish seam allowances. If seam is to be Detailed Instructions Sophia pressed open, overcast the edges before stitching the seam. If seam will be bags inside your pattern. pressed to one side, overcast the raw edges after stitching the seam. Sizes 6 months to 10 years in one package! High Yoke Dresses Check Pattern Pieces for Correct Fit. Compare body measurements to measurements on back of pattern. Ready to wear clothing and pattern French Seam: companies use various standards and this will eliminate disappointment later. 1. Place fabric, wrong sides together and zig-zag stitch using a short narrow Sophia are very versatile round and square neck dresses.