Polcawich, Ronald: Design, Fabrication, Test, and Evaluation Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
HCL Software's
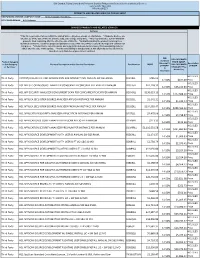
IBM Branded, Fujistu Branded and Panasonic Branded Products and Related Services and Cloud Services Contract DIR-TSO-3999 PRICING SHEET PRODUCTS AND RELATED SERVICES PRICING SHEET RESPONDING VENDOR COMPANY NAME:____Sirius Computer Solutions_______________ PROPOSED BRAND:__HCL Software__________________________ BRANDED PRODUCTS AND RELATED SERVICES Software * This file is generated for use within the United States. All prices shown are US Dollars. * Products & prices are effective as of the date of this file and are subject to change at any time. * HCL may announce new or withdraw products from marketing after the effective date of this file. * Nothwithstanding the product list and prices identified on this file, customer proposals/quotations issued will reflect HCL's current offerings and commercial list prices. * Product list is not all inclusive and may not include products removed from availability (sale) or added after the date of this update. * Product availability is not guaranteed. Not all products listed below are found on every State/Local government contract. DIR DIR CUSTOMER Customer Product Category PRICE (MSRP- Discount % Description or SubCategory Product Description and/or Service Description Part Number MSRP DIR CUSTOMER off MSRP* of MSRP or Services* DISCOUNT Plus (2 Admin Fee) Decimals) HCL SLED Third Party CNTENT/COLLAB ACC AND WEBSPH PRTL SVR INTRANET PVU ANNUAL SW S&S RNWL E045KLL $786.02 14.50% $677.09 Price HCL SLED Third Party HCL APP SEC OPEN SOURCE ANALYZER CONSCAN PER CONCURRENT EVENT PER ANNUM D20H6LL $41,118.32 -

A Novel Route to Synthesis of Lead Glycolate and Perovskite Lead Titanate, Lead Zirconate, and Lead Zirconate Titanate (PZT)
36 «“√ “√«‘®—¬ ¡¢. (∫».) 7 (1) : ¡.§. - ¡’.§. 2550 A Novel Route to Synthesis of Lead Glycolate and Perovskite Lead Titanate, Lead Zirconate, and Lead Zirconate Titanate (PZT) via Sol-Gel Process π«—µ°√√¡¢Õß°√–∫«π°“√ —߇§√“–Àå‡≈¥‰°≈‚§‡≈µ·≈–‚§√ß √â“ß·∫∫ ‡æÕ√Õø ‰°µå¢Õ߇≈¥‰∑∑“‡πµ ‡≈¥‡´Õ√傧‡πµ ·≈– ‡≈¥‡´Õ√傧‡πµ‰∑∑“‡πµ ºà“π°√–∫«π°“√‚´≈-‡®≈ Nuchnapa Tangboriboon (πÿ™π¿“ µ—Èß∫√‘∫Ÿ√≥å)* Dr. Sujitra Wongkasemjit (¥√. ÿ®‘µ√“ «ß»å‡°…¡®‘µµå)** Dr. Alexander M. Jameison (¥√. Õ‡≈Á°´“π‡¥Õ√å ‡ÕÁ¡ ‡®¡‘ —π)*** Dr. Anuvat Sirivat (¥√. Õπÿ«—≤πå »‘√‘«—≤πå)**** ABSTRACT The reaction of lead acetate trihydrate Pb(CH3COO)2.3H2O and ethylene glycol, using triethylenetetramine (TETA) as a catalyst, provides, in one step, an access to a polymer-like precursor of lead glycolate [-PbOCH2CH2O-] via oxide one pot synthesis (OOPS). The lead glycolate precursor has superior electrical properties than lead acetate trihydrate, suggesting that the lead glycolate precursor can possibly be used as a starting material mixed with other precursors such as titanium glycolate and sodium tris (glycozirconate) to produce lead titanate, lead zirconate, and lead zirconate titanate by sol-gel transition process. ∫∑§¥¬— àÕ ß“π«‘®—¬π’ȉ¥â»÷°…“°“√‡°‘¥ªØ‘°‘√‘¬“√–À«à“߇≈¥Õ–´’‡µ¥‰µ√‰Œ‡¥√µ ·≈–‡Õ∑‘≈’π‰°≈§Õ≈‚¥¬„™â “√ ‰µ√‡Õ∑‘≈’π‡µµ√–¡’π‡ªìπ§–µ–≈’ µå‡æ◊ËÕ„™â„π°“√º≈‘µ “√µ—Èßµâπ‚æ≈‘‡¡Õ√å§◊Õ‡≈¥‰°≈‚§‡≈µ [-PbOCH2CH2O-] ∑ ”§’Ë ≠™π— ¥Àπ‘ ßµ÷Ë Õ¢∫«π°“√𔉪„™à „π°“√ â ߇§√“–À— å “√‰¥Õ‡≈§µ√‘ °™π‘ ¥µ‘ “ßÊà ‰¥·°â à “√‡øÕ√‚√‰¥Õå ‡≈§µ√‘ °‘ “√·Õπ‰∑‡øÕ√å‚√Õ‘‡≈§µ√‘°·≈– “√‡æ’¬‚´‰¥Õ‘‡≈§µ√‘°®“°°“√ —߇§√“–Àå¥â«¬ “√ª√–°Õ∫ÕÕ°‰´¥å‡æ’¬ß ¢—ÈπµÕπ‡¥’¬«∑’ˇ√’¬°«à“ Oxide One Pot Synthesis (OOPS) ∑”„À≥⠓√µ—Èßµâπ‡≈¥‰°≈‚§‡≈µ¡’ ¡∫—µ‘∑“߉øøÑ“ ¥’°«à“‡≈¥Õ–´’‡µ¥‰µ√‰Œ‡¥√µ πÕ°®“°π’Ȭ—ß “¡“√∂𔉪„™âº ¡°—∫ “√µ—Èßµâπ™π‘¥Õ◊ËπÊ ‡™àπ ‰∑∑“‡π’¬¡ ‰°≈‚§‡≈µ·≈–‚´‡¥’¬¡∑√’ ‰°≈‚§‡´Õ√傧‡πµ‡æ◊ËÕº≈‘µ‡≈¥‰∑∑“‡πµ ‡≈¥‡´Õ√傧‡πµ·≈–‡≈¥‡´Õ√傧‡πµ ‰∑∑“‡πµ ‚¥¬ºà“π°√–∫«π°“√‚´≈-‡®≈∑√“π ‘™—Ëπ Key Words : OOPS, Sol-gel process, Dielectric materials §” ”§—≠ : OOPS °√–∫«π°“√‚´≈-‡®≈ «— ¥ÿ‰¥Õ‘‡≈§µ√‘° * Ph.D. -

Bismuth Sodium Titanate Based Materials for Piezoelectric Actuators
Review Bismuth Sodium Titanate Based Materials for Piezoelectric Actuators Klaus Reichmann 1,*, Antonio Feteira 2,† and Ming Li 3,† Received: 19 October 2015; Accepted: 23 November 2015; Published: 4 December 2015 Academic Editor: Lorean Pardo 1 Institute of Chemistry and Technology of Materials, Graz University of Technology, Stremayrgasse 9, Graz 8010, Austria 2 Materials and Engineering Research Institute, Sheffield Hallam University, City Campus, Howard Street, Sheffield S1 1WB, UK; [email protected] 3 Advanced Materials Research Group, Department of Mechanical, Materials and Manufacturing Engineering, The University of Nottingham, University Park, Nottingham NG7 2RD, UK; [email protected] * Correspondence: [email protected]; Tel.: +43-316-8733-2321 † These authors contributed equally to this work. Abstract: The ban of lead in many electronic products and the expectation that, sooner or later, this ban will include the currently exempt piezoelectric ceramics based on Lead-Zirconate-Titanate has motivated many research groups to look for lead-free substitutes. After a short overview on different classes of lead-free piezoelectric ceramics with large strain, this review will focus on Bismuth-Sodium-Titanate and its solid solutions. These compounds exhibit extraordinarily high strain, due to a field induced phase transition, which makes them attractive for actuator applications. The structural features of these materials and the origin of the field-induced strain will be revised. Technologies for texturing, which increases the useable strain, will be introduced. Finally, the features that are relevant for the application of these materials in a multilayer design will be summarized. Keywords: piezoelectric actuator; multilayer; lead-free; bismuth sodium titanate 1. -
Approved for Public Release LPF Environmental Assessment
DOE/EA-2145 ENVIRONMENTAL ASSESSMENT FOR THE LITHIUM PROCESSING FACILITY AT THE Y-12 NATIONAL SECURITY COMPLEX, OAK RIDGE, TENNESSEE Final March 2021 Approved for Public Release LPF Environmental Assessment EXECUTIVE SUMMARY The National Nuclear Security Administration (NNSA), a semi-autonomous agency within the United States (U.S.) Department of Energy (DOE), has the primary responsibility to maintain and enhance the safety, security, and effectiveness of the U.S. nuclear weapons stockpile. One of NNSA’s critical production sites is the Y-12 National Security Complex (Y-12), which is located on the Oak Ridge Reservation (ORR) in Oak Ridge, Tennessee. Y-12 is the only source of secondaries, cases, lithium components, and other nuclear weapon components for the NNSA nuclear security mission. Lithium, which is the subject of this environmental assessment (EA), is an essential element for the refurbishment and modernization of the nuclear weapons stockpile. NNSA has prepared this EA to analyze the potential environmental impacts associated with constructing and operating the Lithium Processing Facility (LPF) to process and supply the lithium material and components that are needed to support the National Security Enterprise. Currently, processing work for enriched lithium vital to weapon components is primarily performed in Building 9204-2, which was built in 1943. The facility, at approximately 325,000 square feet, is oversized for today’s mission, was not built in accordance with current codes and standards, is costly to operate, has many operating issues, and has exceeded its expected life. Replacing Building 9204-2 with a new LPF that is code compliant would improve employee safety; reduce the site’s footprint; improve facility operations to provide energy-efficient assets; and reduce operation and maintenance costs. -

Chromogenic and Fluorogenic Probes for the Detection of Illicit Drugs
DOI:10.1002/open.201800034 Chromogenic and Fluorogenic Probes for the Detection of Illicit Drugs Eva Garrido+,[a] Luis Pla+,[a] Beatriz Lozano-Torres,[a] Sameh El Sayed,[a, b] RamónMartínez-MµÇez,*[a, b, c] and FØlix Sancenón[a, b, c] ChemistryOpen 2018, 7,401 –428 401 2018 The Authors. PublishedbyWiley-VCH Verlag GmbH &Co. KGaA, Weinheim The consumption of illicit drugs has increased exponentially in sary to develop highly rapid, easy,sensitive,and selective recent years and has become aproblem that worries both methods for their detection. Currently,the most widely used governments and international institutions. The rapid emer- methods for drug detection are based on techniques that re- gence of new compounds, their easy access,the low levels at quire large measurement times, the use of sophisticated equip- which these substances are able to produce an effect, and ment, and qualified personnel. Chromo-and fluorogenic meth- their short time of permanence in the organism makeitneces- ods are an alternative to those classical procedures. 1. Introduction euro), ecstasy(22 million euro), opiates (18 millioneuro), and cocaine(17 million euro). According to their pharmacologic be- The use of novel illicit drugs and the constant appearance of havior,drugs can be divided into depressants, stimulants, hal- new psychoactive substances have rapidlygrown in the last lucinogenic, and opioids. years, and reports of the availability and manufacture of such Because of their harmfulnesstohealth,the ability to detect substances have increased.[1] Illicit drugs are those for which and quantify “drugsofabuse” in afast, easy,and reliable way nonmedicaluse has been prohibited by internationalcontrol is crucial. -

HCL Sametime
HCL Sametine Mensajería instantánea y reuniones online para tu entorno laboral HCL Sametime La mensajería instantánea HCL Sametime facilita la comunicación en tu entorno de negocio. Ofrece una experiencia de usuario unificada para la mensajería instantánea, las reuniones online, los mensajes de voz, de vídeo, los datos y más. Accede a reuniones online desde el escritorio, el portátil, la tablet o el móvil. Comparte archivos, aplicaciones y pantallas de forma interna o externa utilizando funciones seguras. La conexión en un clic con compañeros permite acceder rápidamente a información y cumplir con las necesidades diarias del negocio. HCL Sametime trae la comunicación social a los procesos de empresa con una experiencia de usuario y una integración unificadas. Comunícate como quieras y al instante. HCL Sametime es un conjunto de productos de comunicación para empresa en tiempo real que proporciona funciones completas de colaboración privada o en grupo, incluyendo mensajería instantánea (IM, en inglés), voz, vídeo, conferencias y telefonía. Piensa en HCL Sametime como el Último paso en la plataforma de comunicación social de una empresa. Piensa en un empleado de primera línea del centro de asistencia que necesita contar rápidamente con un experto o una persona que tome una decisión. Con HCL Encuentra el Sametime, ese empleado puede ver fácilmente quién está disponible para ayudarle conocimiento echando un vistazo al directorio de empresa o al programa de email. En solo unos clics, la persona adecuada podrá conectarse por IM, teléfono o videollamada. Así, la respuesta al cliente es más rápida y la satisfacción del cliente será mayor. La reducción del presupuesto para viajes quiere decir que no siempre es posible HCL Saparam el peersontal rieumnirse een persona con los clientes para recoger sus valoraciones. -
For Product Developers and Solution Providers in the Zigbee Sector
Smart Building B2B For Product Developers and Solution Providers in the Zigbee Sector Smart Building B2B For Product Developers and Solution Providers in the Zigbee Sector 2020/21 Content Content Introduction 8 Zigbee luminaire module 56 Solutions 10 Zigbee development board 57 Interface 12 Zigbee Gateway solutions and services 59 Energy efficiency 14 Software libraries 62 Alarm and security functions 16 Network Manager 66 Scheduled actions 20 Smart Building Products (also as OEM) 68 Scenes 22 Gateway G1 71 Configuration 24 Interface 74 Amazon Echo 26 Lighting and consumers 75 Apple HomeKit 28 Shading 78 Energy-independent push button 30 Climate 79 Human Centric Lighting (HCL) 32 Additional options 84 Data visualization 34 Zigbee USB stick U1 85 Mini-app store 36 Reference examples 88 JavaScript engine 38 Compatibility 90 System overview 40 Installation 94 Products for Zigbee product developers 42 Technology and innovation 98 Zigbee Stack Solutions 44 Quality claim and data protection 102 Zigbee USB stick U1 53 Contact 106 IEEE 802.15.4 Wireshark USB stick 54 Imprint 108 6 7 Introduction Introduction As one of the world‘s leading companies in the ubisys also offers the current product range in Internet of Things (IoT) industry, based in the form of customer-specific custom-made Düsseldorf, ubisys develops smart products products or white label solutions. and solutions for networked building techno- We attach particular importance to promote the logy and helps other manufacturers to prepare development of the major international wireless their products for the digital age. networking standards, which we significantly Whether you are a luminaire manufacturer, real influence in major positions within the Zigbee estate developer or chip manufacturer, ubisys Alliance. -

Commercial Driver's License (CDL Manual)
2019 CDL Manual Changes Attention Commercial Drivers Commercial Driver’s License Drug and Alcohol Clearinghouse The Clearinghouse is a secure online database that will provide FMCSA and employers the ability to identify real-time drivers who are prohibited from operating a CMV based on DOT drug and alcohol program violations and ensure that such drivers receive the required evaluation and treatment before operating a CMV on public roads. Specifically, information maintained in the Clearinghouse will enable employers to identify drivers who commit a drug or alcohol program violation while working for one employer, but who fail to subsequently inform another employer as required by current regulations. Records of drug and alcohol program violations will remain in the Clearinghouse for five years, or until the driver has completed the return-to-duty process, whichever is later. The Clearinghouse will contain only violations that occurred on or after the rule’s implementation date of January 4, 2020. Read the Clearinghouse final rule at: www.fmcsa.dot.gov/regulations/commercial-drivers- license-drug-and-alcohol-clearinghouse Large Vehicles Must Yield in Roundabouts (M.S. 169.20) In multiple lane roundabouts, if two vehicles with a total length in excess of 40 feet, a total width of 10 feet, or any combination of vehicles, approach and drive through at approximately the same time, the vehicle on the right must yield the right of way to the vehicle on the left and, if necessary, reduce speed or stop. Table of Contents Part A Minnesota Commercial Driver’s License Requirements .............................................................................. 1 Class of Licenses ........................................................................................................................ 1 Endorsements and Restrictions .................................................................................................. -
Structure and Properties of Lead Zirconate Titanate Thin Films by Pulsed Laser Deposition GOH WEI CHUAN
Structure and Properties of Lead Zirconate Titanate Thin Films by Pulsed Laser Deposition GOH WEI CHUAN (B.Sc (Hons), NUS) A THESIS SUBMITTED FOR THE DEGREE OF Doctoral of Philosophy Department of Physics National University of Singapore 2005 Acknowledgements I would like to express my deepest gratitude to my supervisors, Prof. Ong Chong Kim and Dr. Yao Kui. I would like to thank Prof. Ong for giving me the opportunity to study and perform research work in the Center of Superconducting and Magnetic Materials (CSMM). His passion and enthusiasm in the search for understanding the underlying physics of the experiments have deeply influenced my mindset in conducting experiments and will continue to be my source of inspiration and guidance. Without Prof. Ong’s constant guidance and criticism, I would have lost my bearing in the vast sea of knowledge, and would not have reached this far. I would also like to express my greatest appreciation to Dr. Yao Kui in Institute of Material Research and Engineering (IMRE). His constant advice and meticulous attention to the theoretical and experimental details had deeply influenced my way of research both in designing experiments and interpreting the results. Without his supervision and encouragements in countless hours of his time, it would not be possible for me to complete my publications and thesis. For that I am in debt to him and will forever remember his advice when pursuing my future endeavors. I am indebted to my fellow colleagues in CSMM, IMRE and Department of Physics, NUS, including A/P Sow Chorng Haur, Xu Sheng Yong, Wang Shi Jie, Li Jie, Yang Tao, Tan Chin Yaw, Rao Xue Song, Chen Lin Feng, Yan Lei, Kong Lin Bing, Liu Hua Jun, Lim Poh Chong, Yu Shu Hui, Gan Bee Keen and all those have shared their time helping me and discussing with me in this project. -

Dielectric and Electrical Properties of Lead Zirconate Titanate
Available online a t www.derpharmachemica.com Scholars Research Library Der Pharma Chemica, 2015, 7(10):175-185 (http://derpharmachemica.com/archive.html) ISSN 0975-413X CODEN (USA): PCHHAX Dielectric and electrical properties of lead zirconate titanate R. Balusamy a, P. Kumaravel b and N. G. Renganathan c* aDepartment of Mechanical Engineering, Al-Ameen Engineering College, Erode bDepartment of Mechanical Engineering, Institute of Road and Transport Technology, Erode c School of Basic Sciences, Vel Tech University, Chennai _____________________________________________________________________________________________ ABSTRACT o Lead zirconate titanate (PZT) (P bZrO3- PbTiO3) were prepared by mixed oxide method at 1100 C. Crystalline nature of the synthesized PZT has been confirmed by X-ray powder diffraction studies. The particle size and strain is calculated from X-ray peak broadening analysis by using Williamson-Hall plot. The crystallite size is also calculated using Debye-Scherrer’s formula. Also, the surface morphology and particle size of the samples were imaged using scanning electron microscopy (SEM). Dielectric measurement demonstrates that decrease in dielectric constant with increase in temperature. The temperature dependence of the ac conductivity indicated that the conduction process is due to singly ionized (in ferroelectric region) and doubly ionized (in paraelectric region). Key words : PZT ceramics, dielectric spectroscopy, dielectric losses, SEM. _____________________________________________________________________________________________ INTRODUCTION Lead zirconate titanate (PZT) – a ferroelectric ceramic material has piezoelectric properties and reciprocal behavior. This material is used to convert electrical energy into mechanical energy and vice-versa. The material properties of PZT have been the subject for significant research in recent years due to its excellent applications in micro- electromechanical (MEMS) and nano-electromechanical (NEMS) devices. -

A New PZT (Lead Zirconate Titanate) Piezoelectric Transducer Performances Analysis
International Journal of Research Studies in Science, Engineering and Technology Volume 1, Issue 6, September 2014, PP 1-7 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A new PZT (Lead Zirconate Titanate) Piezoelectric Transducer Performances Analysis Pande A.S1, Prof (Dr.) Kushare B.E.2, Prof. A.K.Pathak3 1Electrical Engineering Dept. K. K. Wagh Institute of Engineering Education and Research, Nashik (MS), India. (Research Schola) 2Professor & H.O.D., Electrical Engineering Dept, K. K. Wagh Institute of Engineering Education and Research, Nashik (MS), India 3Electrical Engineering Dept. AVCOE, Sanagamner, Ahmednagar (MS), India Abstract: Presently there is number of Current measuring devices/ instrument are widely use for measurement of low and high current measurement. In the past decades there was surprisingly low attention of Electrical sensor, this sensor are very useful for replacing some kind of equipment in our existing power system. These measuring requirements are fulfill by using conventional sources out of which Piezoelectric Transducer is having major contribution in future. Considering the rate at which conventional sources are being consumed more power, cost, size and their life into control of power system, it is necessary to adopt alternate current measure ring technology for sustainable development. Out of various current measuring systems, Piezoelectric Transducer is most cost effective in addition to its various advantages. Considering the increasing share of Piezoelectric Transducer interfaced into the system it is necessary to study the power quality and current quality and stability issues. In case of conventional type CT use of copper is cost effective way is essential. This paper presents the operating principle, the performance MATLAB/SIMULATION, and the design of a piezoelectric transducer for measuring high currents. -

Download This Article in PDF Format
E3S Web of Conferences 270, 01011 (2021) https://doi.org/10.1051/e3sconf/202127001011 WFCES 2021 SEM imaging and XPS characterization of doped PVDF fibers Tereza Smejkalová1, Ştefan Ţălu2,*, Rashid Dallaev1, Klára Částková1,3, Dinara Sobola1,3,4, and Anton Nazarov5 1Brno University of Technology, Technická 2848/8, 616 00 Brno, Czech Republic 2The Technical University of Cluj-Napoca, Constantin Daicoviciu Street, no. 15, Cluj-Napoca, 400020, Cluj county, Romania 3Central European Institute of Technology BUT, Purkyňova 123, 612 00 Brno, Czech Republic 4Dagestan State University, Makhachkala, St. M. Gadjieva 43-a, Dagestan Republic 367015, Russia 5Ural State University of Economics, Russian Federation Abstract. Polyvinylidene fluoride (PVDF) is one of the most promising electroactive polymers; it exhibits excellent electroactive behaviours, good biocompatibility, excellent chemical resistance, and thermal stability, rendering it an attractive material for biomedical, electronic, environmental and energy harvesting applications. This work aims to further improve its properties by the inclusion of powders of piezoactive materials. Polyvinylidene fluoride was formed by electrospinning into fibres with a thickness of 1.5-0.3 µm and then examined in a scanning electron microscope. The work offers a description of the current procedure in the preparation of samples and their modification for examination in a scanning electron microscope, characterizes the individual components of doped fibres and deals with specific instruments used for various analytical methods. The work contains a theoretical introduction to the analytical methods to which the samples will be further subjected, such as energy dispersive X-ray spectroscopy (EDX), X-ray photoelectron spectroscopy (XPS). The obtained excellent properties of doped PVDF could be used in the design of sensors.