One-Dimensional Differential Newtonian Analysis for Applications in Saliva Rheology
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Frictional Peeling and Adhesive Shells Suomi Ponce Heredia
Adhesion of thin structures : frictional peeling and adhesive shells Suomi Ponce Heredia To cite this version: Suomi Ponce Heredia. Adhesion of thin structures : frictional peeling and adhesive shells. Physics [physics]. Université Pierre et Marie Curie - Paris VI, 2015. English. NNT : 2015PA066550. tel- 01327267 HAL Id: tel-01327267 https://tel.archives-ouvertes.fr/tel-01327267 Submitted on 6 Jun 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THÈSE DE DOCTORAT DE L’UNIVERSITÉ PIERRE ET MARIE CURIE Spécialité : Physique École doctorale : «Physique en Île-de-France » réalisée Au Laboratoire de Physique et Mécanique des Milieux Hétérogènes présentée par Suomi PONCE HEREDIA pour obtenir le grade de : DOCTEUR DE L’UNIVERSITÉ PIERRE ET MARIE CURIE Sujet de la thèse : Adhesion of thin structures Frictional peeling and adhesive shells soutenue le 30 Novembre, 2015 devant le jury composé de : M. Etienne Barthel Examinateur M. José Bico Directeur de thèse M. Axel Buguin Examinateur Mme. Liliane Léger Rapporteure M. Benoît Roman Invité M. Loïc Vanel Rapporteur 1 Suomi PONCE HEREDIA 30 Novembre, 2015 Sujet : Adhesion of thin structures Frictional peeling and adhesive shells Résumé : Dans cette thèse, nous nous intéressons à l’adhésion d’élastomères sur des substrats rigides (interactions de van der Waals). -

Monday, July 26
USNCCM16 Technical Program (as of July 27, 2021) To find specific authors, use the search function in the pdf file. All times listed are in Central Daylight Saving Time. Monday, July 26 1 TS 1: MONDAY MORNING, JULY 26 10:00 AM 10:20 AM 10:40 AM 11:00 AM 11:20 AM Symposium Honoring J. Tinsley Oden's Monumental Contributions to Computational #M103 Mechanics, Chair(s): Romesh Batra Keynote presentation: On the Equivalence On the Coupling of Fiber-Reinforced Analysis and Between the Multiplicative Hyper-Elasto-Plasticity Classical and Non- Composites: Interface Application of and the Additive Hypo-Elasto-Plasticity Based on Local Models for Failures, Convergence Peridynamics to the Modified Kinetic Logarithmic Stress Rate Applications in Issues, and Sensitivity Fracture in Solids and Computational Analysis Granular Media Mechanics Jacob Fish*, Yang Jiao Serge Prudhomme*, Maryam Shakiba*, Prashant K Jha*, Patrick Diehl Reza Sepasdar Robert Lipton #M201 Imaging-Based Methods in Computational Medicine, Chair(s): Jessica Zhang Keynote presentation: Image-Based A PDE-Constrained Image-Based Polygonal Cardiac Motion Computational Modeling of Prostate Cancer Optimization Model for Lattices for Mechanical Estimation from Cine Growth to Assist Clinical Decision-Making the Material Transport Modeling of Biological Cardiac MR Images Control in Neurons Materials: 2D Based on Deformable Demonstrations Image Registration and Mesh Warping Guillermo Lorenzo*, Thomas J. R. Hughes, Angran Li*, Yongjie Di Liu, Chao Chen, Brian Wentz, Roshan Alessandro Reali, -

Fluid Inertia and End Effects in Rheometer Flows
FLUID INERTIA AND END EFFECTS IN RHEOMETER FLOWS by JASON PETER HUGHES B.Sc. (Hons) A thesis submitted to the University of Plymouth in partial fulfilment for the degree of DOCTOR OF PHILOSOPHY School of Mathematics and Statistics Faculty of Technology University of Plymouth April 1998 REFERENCE ONLY ItorriNe. 9oo365d39i Data 2 h SEP 1998 Class No.- Corrtl.No. 90 0365439 1 ACKNOWLEDGEMENTS I would like to thank my supervisors Dr. J.M. Davies, Prof. T.E.R. Jones and Dr. K. Golden for their continued support and guidance throughout the course of my studies. I also gratefully acknowledge the receipt of a H.E.F.C.E research studentship during the period of my research. AUTHORS DECLARATION At no time during the registration for the degree of Doctor of Philosophy has the author been registered for any other University award. This study was financed with the aid of a H.E.F.C.E studentship and carried out in collaboration with T.A. Instruments Ltd. Publications: 1. J.P. Hughes, T.E.R Jones, J.M. Davies, *End effects in concentric cylinder rheometry', Proc. 12"^ Int. Congress on Rheology, (1996) 391. 2. J.P. Hughes, J.M. Davies, T.E.R. Jones, ^Concentric cylinder end effects and fluid inertia effects in controlled stress rheometry, Part I: Numerical simulation', accepted for publication in J.N.N.F.M. Signed ...^.^Ms>3.\^^. Date Ik.lp.^.m FLUH) INERTIA AND END EFFECTS IN RHEOMETER FLOWS Jason Peter Hughes Abstract This thesis is concerned with the characterisation of the flow behaviour of inelastic and viscoelastic fluids in steady shear and oscillatory shear flows on commercially available rheometers. -

On Exact Solution of Unsteady MHD Flow of a Viscous Fluid in An
Rana et al. Boundary Value Problems 2014, 2014:146 http://www.boundaryvalueproblems.com/content/2014/1/146 R E S E A R C H Open Access On exact solution of unsteady MHD flow of a viscous fluid in an orthogonal rheometer Muhammad Afzal Rana1, Sadia Siddiqa2* and Saima Noor3 *Correspondence: [email protected] Abstract 2Department of Mathematics, COMSATS Institute of Information This paper studies the unsteady MHD flow of a viscous fluid in which each point of Technology, Attock, Pakistan the parallel planes are subject to the non-torsional oscillations in their own planes. Full list of author information is The streamlines at any given time are concentric circles. Exact solutions are obtained available at the end of the article and the loci of the centres of these concentric circles are discussed. It is shown that the motion so obtained gives three infinite sets of exact solutions in the geometry of an orthogonal rheometer in which the above non-torsional oscillations are superposed on the disks. These solutions reduce to a single unique solution when symmetric solutions are looked for. Some interesting special cases are also obtained from these solutions. Keywords: viscous fluid; MHD flow; orthogonal rheometer; eccentric rotation; exact solutions 1 Introduction Berker [] has defined the ‘pseudo plane motions’ of the first kind that: if the streamlines in a plane flow are contained in parallel planes but the velocity components are dependent on the coordinate normal to the planes. Berker [] has obtained a class of exact solutions to the Navier-Stokes equations belonging to the above type of flows. -

Rheology of Frictional Grains
Rheology of frictional grains Dissertation zur Erlangung des mathematisch-naturwissenschaftlichen Doktorgrades “Doctor rerum naturalium” der Georg-August-Universität Göttingen im Promotionsprogramm ProPhys der Georg-August University School of Science (GAUSS) vorgelegt von Matthias Grob aus Mühlhausen Göttingen, 2016 Betreuungsausschuss: • Prof. Dr. Annette Zippelius, Institut für Theoretische Physik, Georg-August-Universität Göttingen • Dr. Claus Heussinger, Institut für Theoretische Physik, Georg-August-Universität Göttingen Mitglieder der Prüfungskommission: • Referentin: Prof. Dr. Annette Zippelius, Institut für Theoretische Physik, Georg-August-Universität Göttingen • Korreferent: Prof. Dr. Reiner Kree, Institut für Theoretische Physik, Georg-August-Universität Göttingen Weitere Mitglieder der Prüfungskommission: • PD Dr. Timo Aspelmeier, Institut für Mathematische Stochastik, Georg-August-Universität Göttingen • Prof. Dr. Stephan Herminghaus, Dynamik Komplexer Fluide, Max-Planck-Institut für Dynamik und Selbstorganisation • Dr. Claus Heussinger, Institut für Theoretische Physik, Georg-August-Universität Göttingen • Prof. Cynthia A. Volkert, PhD, Institut für Materialphysik, Georg-August-Universität Göttingen Tag der mündlichen Prüfung: 09.08.2016 Zusammenfassung Diese Arbeit behandelt die Beschreibung des Fließens und des Blockierens von granularer Materie. Granulare Materie kann einen Verfestigungsübergang durch- laufen. Dieser wird Jamming genannt und ist maßgeblich durch vorliegende Spannungen sowie die Packungsdichte der Körner, -

Lecture 1: Introduction
Lecture 1: Introduction E. J. Hinch Non-Newtonian fluids occur commonly in our world. These fluids, such as toothpaste, saliva, oils, mud and lava, exhibit a number of behaviors that are different from Newtonian fluids and have a number of additional material properties. In general, these differences arise because the fluid has a microstructure that influences the flow. In section 2, we will present a collection of some of the interesting phenomena arising from flow nonlinearities, the inhibition of stretching, elastic effects and normal stresses. In section 3 we will discuss a variety of devices for measuring material properties, a process known as rheometry. 1 Fluid Mechanical Preliminaries The equations of motion for an incompressible fluid of unit density are (for details and derivation see any text on fluid mechanics, e.g. [1]) @u + (u · r) u = r · S + F (1) @t r · u = 0 (2) where u is the velocity, S is the total stress tensor and F are the body forces. It is customary to divide the total stress into an isotropic part and a deviatoric part as in S = −pI + σ (3) where tr σ = 0. These equations are closed only if we can relate the deviatoric stress to the velocity field (the pressure field satisfies the incompressibility condition). It is common to look for local models where the stress depends only on the local gradients of the flow: σ = σ (E) where E is the rate of strain tensor 1 E = ru + ruT ; (4) 2 the symmetric part of the the velocity gradient tensor. The trace-free requirement on σ and the physical requirement of symmetry σ = σT means that there are only 5 independent components of the deviatoric stress: 3 shear stresses (the off-diagonal elements) and 2 normal stress differences (the diagonal elements constrained to sum to 0). -

Rheometry SLIT RHEOMETER
Rheometry SLIT RHEOMETER Figure 1: The Slit Rheometer. L > W h. ∆P Shear Stress σ(y) = y (8-30) L −∆P h Wall Shear Stress σ = −σ(y = h/2) = (8-31) w L 2 NEWTONIAN CASE 6Q Wall Shear Rateγ ˙ = −γ˙ (y = h/2) = (8-32) w h2w σ −∆P h3w Viscosity η = w = (8-33) γ˙ w L 12Q 1 Rheometry SLIT RHEOMETER NON-NEWTONIAN CASE Correction for the real wall shear rate is analogous to the Rabinowitch correction. 6Q 2 + β Wall Shear Rateγ ˙ = (8-34a) w h2w 3 d [log(6Q/h2w)] β = (8-34b) d [log(σw)] σ −∆P h3w Apparent Viscosity η = w = γ˙ w L 4Q(2 + β) NORMAL STRESS DIFFERENCE The normal stress difference N1 can be determined from the exit pressure Pe. dPe N1(γ ˙ w) = Pe + σw (8-45) dσw d(log Pe) N1(γ ˙ w) = Pe 1 + (8-46) d(log σw) These relations were calculated assuming straight parallel streamlines right up to the exit of the die. This assumption is not found to be valid in either experiment or computer simulation. 2 Rheometry SLIT RHEOMETER NORMAL STRESS DIFFERENCE dPe N1(γ ˙ w) = Pe + σw (8-45) dσw d(log Pe) N1(γ ˙ w) = Pe 1 + (8-46) d(log σw) Figure 2: Determination of the Exit Pressure. 3 Rheometry SLIT RHEOMETER NORMAL STRESS DIFFERENCE Figure 3: Comparison of First Normal Stress Difference Values for LDPE from Slit Rheometer Exit Pressure (filled symbols) and Cone&Plate (open symbols). The poor agreement indicates that the more work is needed in order to use exit pressures to measure normal stress differences. -

Rheology of PIM Feedstocks SPECIAL FEATURE
Metal Powder Report Volume 72, Number 1 January/February 2017 metal-powder.net Rheology of PIM feedstocks SPECIAL FEATURE Christian Kukla, Ivica Duretek, Joamin Gonzalez-Gutierrez and Clemens Holzer Introduction constant viscosity is called zero-viscosity h0 (Fig. 1). After a certain > g Powder injection molding (PIM) is a cost effective technique for shear rate ( ˙1), viscosity starts to decrease rapidly as a function of producing complex and precise metal or ceramic components in shear rate, this is known as shear thinning or pseudoplastic behav- mass production [1]. The used raw material, referred as feedstock, ior. For highly filled compounds like PIM feedstocks a yield stress consists of metal or ceramic powder and a polymeric binder can be observed. Thus the viscosity increases dramatically when mainly composed of thermoplastics. The thermoplastic binder decreasing the shear stress and the zero shear viscosity is hard to composition gives plasticity to the feedstock during the molding measure and thus shear thinning is observed even at very low shear g process and holds together the powder grains before sintering. rates. Around a certain higher shear rate ˙2 a second Newtonian > g Most binder systems are made of multi-component systems plateau can be observed and at very high shear rates ( ˙3) the with a range of modifiers which fulfill the above mentioned plateau can change to an increasing viscosity curve due to formation requirements. The flow behavior of the feedstock is the result of of particle agglomerates that can restrict the flow of the binder complex interactions between its constituents. The viscosity of the system. -

Vibrating-Wire Rheometry
Western University Scholarship@Western Electronic Thesis and Dissertation Repository 8-20-2018 2:30 PM Vibrating-wire Rheometry Cameron C. Hopkins The University of Western Ontario Supervisor de Bruyn, John R. The University of Western Ontario Graduate Program in Physics A thesis submitted in partial fulfillment of the equirr ements for the degree in Doctor of Philosophy © Cameron C. Hopkins 2018 Follow this and additional works at: https://ir.lib.uwo.ca/etd Part of the Statistical, Nonlinear, and Soft Matter Physics Commons Recommended Citation Hopkins, Cameron C., "Vibrating-wire Rheometry" (2018). Electronic Thesis and Dissertation Repository. 5584. https://ir.lib.uwo.ca/etd/5584 This Dissertation/Thesis is brought to you for free and open access by Scholarship@Western. It has been accepted for inclusion in Electronic Thesis and Dissertation Repository by an authorized administrator of Scholarship@Western. For more information, please contact [email protected]. Abstract This thesis consists of two projects on the behaviour of a novel vibrating-wire rheometer and a third project studying the gelation dynamics of aqueous solutions of Pluronic F127. In the first study, we use COMSOL to perform two-dimensional simulations of the oscillations of a wire in Newtonian and shear-thinning fluids. Our results show that the resonant behaviour of the wire agrees well with the theory of a wire vibrating in Newtonian fluids. In shear-thinning fluids, we find resonant behaviour similar to that in Newtonian fluids. In addition, we find that the shear-rate and viscosity in the fluid vary significantly in both space and time. We find that the resonant behaviour of the wire can be well described by the theory of a wire vibrating in a Newtonian fluid if the viscosity in the theory is set equal to the viscosity averaged over the cir- cumference of the wire and over one period of the wire’s oscillation at the resonant frequency. -

The Design and Analysis of a Micro Squeeze Flow Rheometer
The Design and Analysis of a Micro Squeeze Flow Rheometer By David Cheneler A thesis submitted to The University of Birmingham for the degree of DOCTOR OF PHILOSOPHY Department of Mechanical Engineering College of Engineering and Physical Sciences The University of Birmingham September 2009 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. ABSTRACT This thesis describes the analysis and design of a micro squeeze flow rheometer. The need to analyse the rheology of complex liquids occurs regularly in industry and during research. However, frequently the amount of fluid available is too small, precluding the use of conventional rheometers. Conventional rheometers also tend to have the disadvantage of being too massive, preventing them from operating effectively at high frequencies. The investigation carried out in this thesis has revealed that current microrheometry techniques also have their own disadvantages. The proposed design is a stand-alone device capable of measuring the dynamic properties of nanolitre volumes of viscoelastic fluid at frequencies up to the kHz range, an order of magnitude greater than conventional rheometers. The device uses a single piezoelectric component to both actuate and sense its own position. -
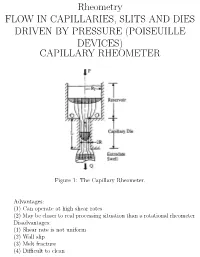
Rheometry FLOW in CAPILLARIES, SLITS and DIES DRIVEN by PRESSURE (POISEUILLE DEVICES) CAPILLARY RHEOMETER
Rheometry FLOW IN CAPILLARIES, SLITS AND DIES DRIVEN BY PRESSURE (POISEUILLE DEVICES) CAPILLARY RHEOMETER Figure 1: The Capillary Rheometer. Advantages: (1) Can operate at high shear rates (2) May be closer to real processing situation than a rotational rheometer Disadvantages: (1) Shear rate is not uniform (2) Wall slip (3) Melt fracture (4) Difficult to clean 1 Rheometry CAPILLARY RHEOMETER NEWTONIAN CASE The velocity profile from the Navier-Stokes Equations is: 2Q r 2 v(r) = 1 − (8-9) πR2 R dv Shear Rateγ ˙ = (8-6) dr −4Qr γ˙ (r) = πR4 r γ˙ (r) = γ˙ (R) (8-8) R Wall Shear Rateγ ˙ w ≡ −γ˙ (R) (8-11) 4Q γ˙ = (8-12) w πR3 The shear stress from the Navier-Stokes Equations is: r dP σ(r) = − (8-2) 2 dz R dP σ(R) = − (8-3) 2 dz r σ(r) = σ(R) (8-4) R R dP Wall Shear Stress σ ≡ σ(R) = − (8-5) w 2 dz σ σ (−dP/dz)πR4 Viscosity η = = w = (8-14) γ˙ γ˙ w 8Q 2 Rheometry CAPILLARY RHEOMETER NON-NEWTONIAN CASE 4 σw (−dP/dz)πR Apparent Viscosity ηA = = (8-15) γ˙ A 8Q Since the shear rate varies across the radius of the capillary, a non- Newtonian fluid will have an effective viscosity that depends on radial posi- tion. Figure 2: Dependence of Real Shear Stress σ, Apparent Shear Rateγ ˙ a, and Real Shear Rateγ ˙ on Radial Position for a Non-Newtonian Fluid Flowing in a Capillary. 3 Rheometry CAPILLARY RHEOMETER NON-NEWTONIAN CASE THE RABINOWITCH CORRECTION There is a unique relation between the wall shear stress and the apparent wall shear rate. -

Dynisco Viscosensor Online Rheometer
Dynisco ViscoSensor Online Rheometer Experience the benefits of online rheology measurement Polymer manufacturers need to create new materials and deliver high quality to meet ever changing end-use requirements. Precise testing and analysis is mandatory to ensure quality and to stay competitive. Rely on Dynisco’s solutions to gain a window into your process and speed up the development, production, quality testing and analysis of polymers. Material Analysis Dynisco™ analyzers, including melt flow indexers, and rheometers, are recognized for testing the physical, mechanical, and thermal properties of polymers. Offering worldwide support and innovative instruments that span the complete life cycle of a polymer, Dynisco’s material analysis solutions range from the analysis of a polymer in the laboratory, to online quality control in production, to processing small quantities of special polymers or composites. Scrap Reduction No matter what stage of the polymer’s life cycle, eliminating waste and keeping production levels at peak capacity are crucial to ensuring profitability in today’s highly competitive environment. Our goal is to provide objective measurements and high quality testing to improve and speed the development and production of polymers. Sustainability Sustainability is more than just protecting the environment. We want to lead the way to the future and empower you with sensors, controls, and analytical instruments that offer maximum control, reduce downtime, minimize scrap, and promote environmental consciousness. The ability to feed used plastic into the supply chain to manufacture new materials, with less costs and without compromises in material specifications, is the goal and has to be realized through objective measurements and analysis.