Frictional Peeling and Adhesive Shells Suomi Ponce Heredia
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Monday, July 26
USNCCM16 Technical Program (as of July 27, 2021) To find specific authors, use the search function in the pdf file. All times listed are in Central Daylight Saving Time. Monday, July 26 1 TS 1: MONDAY MORNING, JULY 26 10:00 AM 10:20 AM 10:40 AM 11:00 AM 11:20 AM Symposium Honoring J. Tinsley Oden's Monumental Contributions to Computational #M103 Mechanics, Chair(s): Romesh Batra Keynote presentation: On the Equivalence On the Coupling of Fiber-Reinforced Analysis and Between the Multiplicative Hyper-Elasto-Plasticity Classical and Non- Composites: Interface Application of and the Additive Hypo-Elasto-Plasticity Based on Local Models for Failures, Convergence Peridynamics to the Modified Kinetic Logarithmic Stress Rate Applications in Issues, and Sensitivity Fracture in Solids and Computational Analysis Granular Media Mechanics Jacob Fish*, Yang Jiao Serge Prudhomme*, Maryam Shakiba*, Prashant K Jha*, Patrick Diehl Reza Sepasdar Robert Lipton #M201 Imaging-Based Methods in Computational Medicine, Chair(s): Jessica Zhang Keynote presentation: Image-Based A PDE-Constrained Image-Based Polygonal Cardiac Motion Computational Modeling of Prostate Cancer Optimization Model for Lattices for Mechanical Estimation from Cine Growth to Assist Clinical Decision-Making the Material Transport Modeling of Biological Cardiac MR Images Control in Neurons Materials: 2D Based on Deformable Demonstrations Image Registration and Mesh Warping Guillermo Lorenzo*, Thomas J. R. Hughes, Angran Li*, Yongjie Di Liu, Chao Chen, Brian Wentz, Roshan Alessandro Reali, -

Rheology of Frictional Grains
Rheology of frictional grains Dissertation zur Erlangung des mathematisch-naturwissenschaftlichen Doktorgrades “Doctor rerum naturalium” der Georg-August-Universität Göttingen im Promotionsprogramm ProPhys der Georg-August University School of Science (GAUSS) vorgelegt von Matthias Grob aus Mühlhausen Göttingen, 2016 Betreuungsausschuss: • Prof. Dr. Annette Zippelius, Institut für Theoretische Physik, Georg-August-Universität Göttingen • Dr. Claus Heussinger, Institut für Theoretische Physik, Georg-August-Universität Göttingen Mitglieder der Prüfungskommission: • Referentin: Prof. Dr. Annette Zippelius, Institut für Theoretische Physik, Georg-August-Universität Göttingen • Korreferent: Prof. Dr. Reiner Kree, Institut für Theoretische Physik, Georg-August-Universität Göttingen Weitere Mitglieder der Prüfungskommission: • PD Dr. Timo Aspelmeier, Institut für Mathematische Stochastik, Georg-August-Universität Göttingen • Prof. Dr. Stephan Herminghaus, Dynamik Komplexer Fluide, Max-Planck-Institut für Dynamik und Selbstorganisation • Dr. Claus Heussinger, Institut für Theoretische Physik, Georg-August-Universität Göttingen • Prof. Cynthia A. Volkert, PhD, Institut für Materialphysik, Georg-August-Universität Göttingen Tag der mündlichen Prüfung: 09.08.2016 Zusammenfassung Diese Arbeit behandelt die Beschreibung des Fließens und des Blockierens von granularer Materie. Granulare Materie kann einen Verfestigungsübergang durch- laufen. Dieser wird Jamming genannt und ist maßgeblich durch vorliegende Spannungen sowie die Packungsdichte der Körner, -

Lecture 1: Introduction
Lecture 1: Introduction E. J. Hinch Non-Newtonian fluids occur commonly in our world. These fluids, such as toothpaste, saliva, oils, mud and lava, exhibit a number of behaviors that are different from Newtonian fluids and have a number of additional material properties. In general, these differences arise because the fluid has a microstructure that influences the flow. In section 2, we will present a collection of some of the interesting phenomena arising from flow nonlinearities, the inhibition of stretching, elastic effects and normal stresses. In section 3 we will discuss a variety of devices for measuring material properties, a process known as rheometry. 1 Fluid Mechanical Preliminaries The equations of motion for an incompressible fluid of unit density are (for details and derivation see any text on fluid mechanics, e.g. [1]) @u + (u · r) u = r · S + F (1) @t r · u = 0 (2) where u is the velocity, S is the total stress tensor and F are the body forces. It is customary to divide the total stress into an isotropic part and a deviatoric part as in S = −pI + σ (3) where tr σ = 0. These equations are closed only if we can relate the deviatoric stress to the velocity field (the pressure field satisfies the incompressibility condition). It is common to look for local models where the stress depends only on the local gradients of the flow: σ = σ (E) where E is the rate of strain tensor 1 E = ru + ruT ; (4) 2 the symmetric part of the the velocity gradient tensor. The trace-free requirement on σ and the physical requirement of symmetry σ = σT means that there are only 5 independent components of the deviatoric stress: 3 shear stresses (the off-diagonal elements) and 2 normal stress differences (the diagonal elements constrained to sum to 0). -

Rheometry SLIT RHEOMETER
Rheometry SLIT RHEOMETER Figure 1: The Slit Rheometer. L > W h. ∆P Shear Stress σ(y) = y (8-30) L −∆P h Wall Shear Stress σ = −σ(y = h/2) = (8-31) w L 2 NEWTONIAN CASE 6Q Wall Shear Rateγ ˙ = −γ˙ (y = h/2) = (8-32) w h2w σ −∆P h3w Viscosity η = w = (8-33) γ˙ w L 12Q 1 Rheometry SLIT RHEOMETER NON-NEWTONIAN CASE Correction for the real wall shear rate is analogous to the Rabinowitch correction. 6Q 2 + β Wall Shear Rateγ ˙ = (8-34a) w h2w 3 d [log(6Q/h2w)] β = (8-34b) d [log(σw)] σ −∆P h3w Apparent Viscosity η = w = γ˙ w L 4Q(2 + β) NORMAL STRESS DIFFERENCE The normal stress difference N1 can be determined from the exit pressure Pe. dPe N1(γ ˙ w) = Pe + σw (8-45) dσw d(log Pe) N1(γ ˙ w) = Pe 1 + (8-46) d(log σw) These relations were calculated assuming straight parallel streamlines right up to the exit of the die. This assumption is not found to be valid in either experiment or computer simulation. 2 Rheometry SLIT RHEOMETER NORMAL STRESS DIFFERENCE dPe N1(γ ˙ w) = Pe + σw (8-45) dσw d(log Pe) N1(γ ˙ w) = Pe 1 + (8-46) d(log σw) Figure 2: Determination of the Exit Pressure. 3 Rheometry SLIT RHEOMETER NORMAL STRESS DIFFERENCE Figure 3: Comparison of First Normal Stress Difference Values for LDPE from Slit Rheometer Exit Pressure (filled symbols) and Cone&Plate (open symbols). The poor agreement indicates that the more work is needed in order to use exit pressures to measure normal stress differences. -

Vibrating-Wire Rheometry
Western University Scholarship@Western Electronic Thesis and Dissertation Repository 8-20-2018 2:30 PM Vibrating-wire Rheometry Cameron C. Hopkins The University of Western Ontario Supervisor de Bruyn, John R. The University of Western Ontario Graduate Program in Physics A thesis submitted in partial fulfillment of the equirr ements for the degree in Doctor of Philosophy © Cameron C. Hopkins 2018 Follow this and additional works at: https://ir.lib.uwo.ca/etd Part of the Statistical, Nonlinear, and Soft Matter Physics Commons Recommended Citation Hopkins, Cameron C., "Vibrating-wire Rheometry" (2018). Electronic Thesis and Dissertation Repository. 5584. https://ir.lib.uwo.ca/etd/5584 This Dissertation/Thesis is brought to you for free and open access by Scholarship@Western. It has been accepted for inclusion in Electronic Thesis and Dissertation Repository by an authorized administrator of Scholarship@Western. For more information, please contact [email protected]. Abstract This thesis consists of two projects on the behaviour of a novel vibrating-wire rheometer and a third project studying the gelation dynamics of aqueous solutions of Pluronic F127. In the first study, we use COMSOL to perform two-dimensional simulations of the oscillations of a wire in Newtonian and shear-thinning fluids. Our results show that the resonant behaviour of the wire agrees well with the theory of a wire vibrating in Newtonian fluids. In shear-thinning fluids, we find resonant behaviour similar to that in Newtonian fluids. In addition, we find that the shear-rate and viscosity in the fluid vary significantly in both space and time. We find that the resonant behaviour of the wire can be well described by the theory of a wire vibrating in a Newtonian fluid if the viscosity in the theory is set equal to the viscosity averaged over the cir- cumference of the wire and over one period of the wire’s oscillation at the resonant frequency. -

One-Dimensional Differential Newtonian Analysis for Applications in Saliva Rheology
One-dimensional Differential Newtonian Analysis for Applications in Saliva Rheology by Louise Lu McCarroll A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Mechanical Engineering) in The University of Michigan 2017 Doctoral Committee: Professor William W Schultz, Co-Chair Professor Michael J Solomon, Co-Chair Professor Joseph Bull Dr. Joseph T Murray, Veterans Affairs Hospital Professor Alan S Wineman Louise Lu McCarroll [email protected] ORCID iD: 0000-0003-1471-0655 © Louise Lu McCarroll 2017 For my parents, Yin and Lin Lin ii ACKNOWLEDGEMENTS I think the best phrase that describes this experience for me is \it takes a village" or in my case it should be \it takes a whole metropolitan area and then some." But I'll stick with the \village" analogy for now. The chief villagers I'd like to thank are my advisors, Professor William Schultz and Professor Michael Solomon, for their seemingly unlimited supply of patience with me, especially when I was feeling like the village idiot. Thank you for your guidance these past few years, for teaching me to be resourceful, to a construct logical argument and perform novel analyses, for propping me up when my spirits were low, and last but not least, for being so approachable. I have really enjoyed working on this project with you both. Bill - I am still trying to learn how to \embrace chaos." Mike - I appreciate all the structure you have imposed on this process. I'd also like to extend my gratitude to my committee members, Professor Alan Wineman, Professor Joseph Bull, and Dr. -
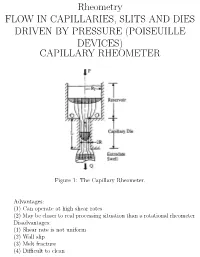
Rheometry FLOW in CAPILLARIES, SLITS and DIES DRIVEN by PRESSURE (POISEUILLE DEVICES) CAPILLARY RHEOMETER
Rheometry FLOW IN CAPILLARIES, SLITS AND DIES DRIVEN BY PRESSURE (POISEUILLE DEVICES) CAPILLARY RHEOMETER Figure 1: The Capillary Rheometer. Advantages: (1) Can operate at high shear rates (2) May be closer to real processing situation than a rotational rheometer Disadvantages: (1) Shear rate is not uniform (2) Wall slip (3) Melt fracture (4) Difficult to clean 1 Rheometry CAPILLARY RHEOMETER NEWTONIAN CASE The velocity profile from the Navier-Stokes Equations is: 2Q r 2 v(r) = 1 − (8-9) πR2 R dv Shear Rateγ ˙ = (8-6) dr −4Qr γ˙ (r) = πR4 r γ˙ (r) = γ˙ (R) (8-8) R Wall Shear Rateγ ˙ w ≡ −γ˙ (R) (8-11) 4Q γ˙ = (8-12) w πR3 The shear stress from the Navier-Stokes Equations is: r dP σ(r) = − (8-2) 2 dz R dP σ(R) = − (8-3) 2 dz r σ(r) = σ(R) (8-4) R R dP Wall Shear Stress σ ≡ σ(R) = − (8-5) w 2 dz σ σ (−dP/dz)πR4 Viscosity η = = w = (8-14) γ˙ γ˙ w 8Q 2 Rheometry CAPILLARY RHEOMETER NON-NEWTONIAN CASE 4 σw (−dP/dz)πR Apparent Viscosity ηA = = (8-15) γ˙ A 8Q Since the shear rate varies across the radius of the capillary, a non- Newtonian fluid will have an effective viscosity that depends on radial posi- tion. Figure 2: Dependence of Real Shear Stress σ, Apparent Shear Rateγ ˙ a, and Real Shear Rateγ ˙ on Radial Position for a Non-Newtonian Fluid Flowing in a Capillary. 3 Rheometry CAPILLARY RHEOMETER NON-NEWTONIAN CASE THE RABINOWITCH CORRECTION There is a unique relation between the wall shear stress and the apparent wall shear rate. -

Yield Stress Fluid Flows: a Review of Experimental Data P. Coussot Laboratoire Navier, Univ
Yield stress fluid flows: a review of experimental data P. Coussot Laboratoire Navier, Univ. Paris-Est, Champs-sur-Marne, France Abstract: Yield stress fluids are encountered in a wide range of applications: toothpastes, cement, mortar, foams, muds, mayonnaise, etc. The fundamental character of these fluids is that they are able to flow (i.e. deform indefinitely) only if they are submitted to a stress larger than a critical value, otherwise they deform in a finite way like solids. The flow characteristics of such materials are difficult to predict as they involve permanent or transient solid and liquid regions whose location cannot generally be determined a priori. Here we review the existing knowledge as it appears from experimental data, concerning flows of simple (non-thixotropic) yield stress fluids under various conditions mainly: (i) uniform flows in straight channels or rheometrical geometries, (ii) complex stationary flows in channels of varying cross-section such as extrusion, expansion, flow through porous medium, (iii) transient flows such as flows around obstacles, spreading, spin-coating, squeeze flow, elongation. The effects of surface tension, confinement, and secondary flows are also reviewed. A special emphasis will be laid on the experimental works providing information on the internal flow characteristics which give critical elements for a comparison with numerical predictions. It is in particular shown that (i) the deformations in the solid regime can play a critical role in transient flows; (ii) the yielding character does not play a significant role on the flow field when the boundary conditions impose large deformations; (iii) in secondary flows the yielding character is lost. -

Vorticity Alignment and Negative Normal Stresses in Sheared Attractive Emulsions
PHYSICAL REVIEW LETTERS week ending VOLUME 92, NUMBER 5 6 FEBRUARY 2004 Vorticity Alignment and Negative Normal Stresses in Sheared Attractive Emulsions Alberto Montesi, Alejandro A. Pen˜a,* and Matteo Pasquali† Department of Chemical Engineering, Rice University, 6100 Main Street, Houston, Texas 77005, USA (Received 13 June 2003; published 6 February 2004) Attractive emulsions near the colloidal glass transition are investigated by rheometry and optical microscopy under shear. We find that (i) the apparent viscosity drops with increasing shear rate, then remains approximately constant in a range of shear rates, then continues to decay; (ii) the first normal stress difference N1 transitions sharply from nearly zero to negative in the region of constant shear viscosity; and (iii) correspondingly, cylindrical flocs form, align along the vorticity, and undergo a log- rolling movement. An analysis of the interplay between steric constraints, attractive forces, and composition explains this behavior, which seems universal to several other complex systems. DOI: 10.1103/PhysRevLett.92.058303 PACS numbers: 83.80.Iz, 83.50.Ax, 47.55.Dz Emulsions are relatively stable dispersions of drops of a Rheological measurements were carried out in a liquid into another liquid in which the former is partially strain-controlled rheometer using several geometries [1]. or totally immiscible. Stability is conferred by other Microscopic observations were performed using a cus- components, usually surfactants or finely divided solids, tomized rheo-optical cell consisting of two parallel which adsorb at the liquid-liquid interface and retard glass surfaces, with the upper one fixed to the micro- coalescence and other destabilizing mechanisms. scope (Nikon Eclipse E600) and the lower one set on a Emulsions can be regarded as repulsive or attractive, computer-controlled xyz translation stage (Prior Proscan depending on the prevailing interaction forces between H101). -

II: Measurements: Rheometry Measures Deformation /Stress on a Material with Unknown Constitutive Behavior
rheometry Rheometry: the science of rheological measurements What is a rheometer? An instrument that creates a flow and enforces stress / deformation and II: measurements: rheometry measures deformation /stress on a material with unknown constitutive behavior - shear versus extension - small strain versus large strain - transient versus steady rheometry rheometry Homogeneous nonhomogeneous, indexers (complex flow fields) material functions and classification of rheometers Introduction Drag flow: shear flow generated by a moving and a fixed solid surface Pressure driven flow: shear generated by a presure 5: shear rheometry: drag flows difference over a closed channel (versus pressure driven flows) Measure the: - relaxation modulus - transient shear viscosity - steady shear viscosity - first normal stress difference coefficient - second normal stress difference coefficient Drag flow: sliding plates Working equations Shear flow geometries Critical time for homogeneous simple shear flow Drag flow: concentric cylinders (Couette flow) Drag flow: concentric cylinders (Couette flow) Assumptions: Shear stress: - Steady, laminair, isothermal flow - vθ = r Ω only and vr = vz = 0 - Negligible gravity and end effects - Symmetry in θ, ∂/∂θ = 0 Torque measured at the inner cylinder Equations of motion, cyl. coordinates → Outer cylinder Boundary conditions → Drag flow: concentric cylinders (Couette flow) Drag flow: concentric cylinders (Couette flow) Strain and strain rate Change of variable: Dropping subscripts: Very narrow gap (Ri/Ro>0.99): Integrating (rotating inner cyl.): Ri/Ro<0.99, cylinder coord.: Differentiating with respect to stress: Shear rate varies across the gap With: It follows: Drag flow: concentric cylinders (Couette flow) For 0.5 < κ < 1.0 expand: In Mclaurin series: Where n, the power law index, in terms of torque and rotation rate : For κ > 0.5, n = const. -
Capillary Rheometry: Analysis of Low-Viscosity Fluids, and Viscous Liquids and Melts at High Shear Rates
Reprinted from American Laboratory October 2009 Technical Article by Tien T. Dao, Allan X. Ye, Ali A. Shaito, Nick Roye, and Kaj Hedman Capillary Rheometry: Analysis of Low-Viscosity Fluids, and Viscous Liquids and Melts at High Shear Rates heology is defined as the study of the vertical capillary die when no instrument The basic components of a capillary rhe- flow and deformation of fluids. Based driving force is applied, and 2) low-pressure ometer consist of a barrel, ram (piston), Ron the need to quickly and accurately readings from the transducer during the capillary die fitted inside the barrel, pres- set and control processing conditions, opti- measurement. Many times the measured sure gauge, and force transducer (Figure mize product performance, and/or ensure pressure signal can reach the low-end limit 1). The material is located within the bar- product acceptance, accurate rheological of the pressure transducer used. rel, and then the ram (or piston) attached measurements have become essential in the with a force transducer pushes the material characterization of any flowable materials. Another concern is the required length- through the capillary die at a specified rate. By utilizing rheological measurements on to-diameter ratio (L/D) of the die for the Above the die inside the barrel is a pres- new materials, process conditions can easily measurement to be rigorous. According to sure transducer, which allows for the mea- be determined, and the final product prop- Macosko,3 an L/D of 60 or higher is required surement of the gauge pressure ΔP within erties and performance can be predicted. -

Strain Shifts Under Stress-Controlled Oscillatory Shearing in Theoretical
Strain shifts under stress-controlled oscillatory shearing in theoretical, experimental, and structural perspectives: Application to probing zero-shear viscosity Johnny Ching-Wei Lee, Yu-Tong Hong, Katie M. Weigandt, Elizabeth G. Kelley, Hyunjoon Kong, and Simon A. Rogers Citation: Journal of Rheology 63, 863 (2019); doi: 10.1122/1.5111358 View online: https://doi.org/10.1122/1.5111358 View Table of Contents: https://sor.scitation.org/toc/jor/63/6 Published by the The Society of Rheology ARTICLES YOU MAY BE INTERESTED IN Rheology of crystallizing polymers: The role of spherulitic superstructures, gap height, and nucleation densities Journal of Rheology 63, 851 (2019); https://doi.org/10.1122/1.5109893 A review of thixotropy and its rheological modeling Journal of Rheology 63, 477 (2019); https://doi.org/10.1122/1.5055031 Extensional rheology of highly-entangled α-olefin molecular bottlebrushes Journal of Rheology 63, 917 (2019); https://doi.org/10.1122/1.5110557 Rheo-PIV analysis of the vane in cup flow of a viscoplastic microgel Journal of Rheology 63, 905 (2019); https://doi.org/10.1122/1.5118900 Review: Rheology of noncolloidal suspensions with non-Newtonian matrices Journal of Rheology 63, 705 (2019); https://doi.org/10.1122/1.5085363 The unification of disparate rheological measures in oscillatory shearing Physics of Fluids 31, 073107 (2019); https://doi.org/10.1063/1.5106378 Strain shifts under stress-controlled oscillatory shearing in theoretical, experimental, and structural perspectives: Application to probing zero-shear viscosity Johnny Ching-Wei Lee,1 Yu-Tong Hong,1 Katie M. Weigandt,2 Elizabeth G. Kelley,2 Hyunjoon Kong,1 and Simon A.