To Reduce Pilot Workload in the AH-64D Apache Longbow
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Dynamical Torsional Analysis of Schweizer 300C Helicopter Rotor
Dynamical Torsional Analysis of Schweizer 300C Helicopter Rotor Systems تحليل اﻹلتواء الديناميكي ﻷنظمة الحركة في المروحية العمودية )Schweizer 300C( by HAITHAM KHAMIS MOHAMMED AL-SAEEDI Dissertation submitted in fulfilment of the requirements for the degree of MSc SYSTEMS ENGINEERING at The British University in Dubai January 2019 DECLARATION I warrant that the content of this research is the direct result of my own work and that any use made in it of published or unpublished copyright material falls within the limits permitted by international copyright conventions. I understand that a copy of my research will be deposited in the University Library for permanent retention. I hereby agree that the material mentioned above for which I am author and copyright holder may be copied and distributed by The British University in Dubai for the purposes of research, private study or education and that The British University in Dubai may recover from purchasers the costs incurred in such copying and distribution, where appropriate. I understand that The British University in Dubai may make a digital copy available in the institutional repository. I understand that I may apply to the University to retain the right to withhold or to restrict access to my thesis for a period which shall not normally exceed four calendar years from the congregation at which the degree is conferred, the length of the period to be specified in the application, together with the precise reasons for making that application. ___________________ Signature of the student COPYRIGHT AND INFORMATION TO USERS The author whose copyright is declared on the title page of the work has granted to the British University in Dubai the right to lend his/her research work to users of its library and to make partial or single copies for educational and research use. -

Northrop F-5 E/F, CF-5D
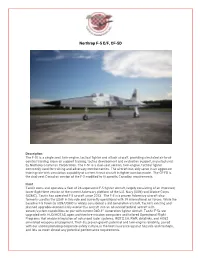
Northrop F-5 E/F, CF-5D Description The F-5E is a single seat, twin-engine, tactical fighter and attack aircraft. providing simulated air-to-air combat training, close-air support training, tactics development and evaluation support, manufactured by Northrop Grumman Corporation. The F-5F is a dual-seat version, twin-engine, tactical fighter commonly used for training and adversary combat tactics. The aircraft can ably serve in an aggressor training role with simulation capability of current threat aircraft in fighter combat mode. The CF-FD is the dual-seat Canadian version of the F-5 modified to fit specific Canadian requirements. Fleet TacAir owns and operates a fleet of 26 supersonic F-5 fighter aircraft, largely consisting of an improved, lower flight-time version of the current Adversary platform of the U.S. Navy (USN) and Marine Corps (USMC). TacAir has operated F-5 aircraft since 2013. The F-5 is a proven Adversary aircraft also formerly used by the USAF in this role and currently operational with 19 international air forces. While the baseline F-5 flown by USN/USMC is widely considered a 3rd Generation aircraft, TacAir’s existing and planned upgrades economically evolve this aircraft into an advanced tactical aircraft with sensor/system capabilities on par with current DoD 4th Generation fighter aircraft. TacAir F-5s are upgraded with HUD/HOTAS, open architecture mission computers and tailored Operational Flight Programs that enable integration of advanced radar systems, IRSTS, EA, RWR, datalinks, and HOBS simulated weapons employment. TheF-5’s proven growth potential and twin engine reliability, paired with our uncompromising corporate safety culture, is the best insurance against hazards and mishaps, and lets us meet almost any potential performance requirements. -

Federal Register/Vol. 84, No. 241/Monday, December 16, 2019
Federal Register / Vol. 84, No. 241 / Monday, December 16, 2019 / Notices 68431 (MWS), one (1) Control Indicator Unit integration; hardware integration; flight Replacement (LSPR), Control Indicator Replacement (CIUR), one (1) Smart Card test and certifications; selective Unit Replacement (CIUR), and a Assembly (SCA), and one (1) High availability anti-spoofing modules classified User Data Memory (UDM) Capacity Card (HCC/User Data Memory (SAASM); publications and technical card containing the laser jam codes. The (UDM) card. documentation; training and training UDM card is loaded into the LSPR prior Major Defense Equipment (MDE): equipment; field service representatives; to flight; when not in use, the UDM card Twelve (12) Guardian Laser Turret U.S. Government and contractor is removed from the LSRP and put in Assemblies (GLTA) (6 installed, 6 engineering, technical, and logistics secure storage. The Missile Warning spares) support; and other related elements of Sensors (MWS) for AN/AAQ-24(V)N are Seven (7) LAIRCM System Processor logistics and program support. The mounted on the aircraft exterior to Replacements (LSPR) (2 installed 5 estimated cost is $86 million. provide omni-directional protection. spares) This proposed sale will support the The MWS detects the rocket plume of Twenty-three (23) Missile Warning foreign policy and national security of missiles and sends appropriate data Sensors (MWS) (10 installed, 13 the United States by helping to improve signals to the LSPR for processing. The spares) the security of a friendly country that LSPR analyzes the data from each continues to be an important force for Non-MDE: Also included are LAIRCM sensor and automatically deploys the political and economic progress in the CIURs; SCAs; HCCs; UDM cards; initial appropriate countermeasure via the Middle East. -

Federal Register/Vol. 80, No. 71/Tuesday, April 14, 2015/Notices
Federal Register / Vol. 80, No. 71 / Tuesday, April 14, 2015 / Notices 19967 ending at 5:30 p.m. each day, or as national visitors should contact Dr. Jim 16 to the Northeast Multispecies Fishery necessary to complete business. The Hastie at (206) 860–3412 at least 2 Management Plan, in conjunction with Panel will adjourn on Friday, July 31. weeks prior to the meeting date to Final Rule 0648–BE75. The information The locations of the meetings are as initiate the security clearance process. collection currently approved under follows: OMB Control No. 0648–0605 includes a Special Accommodations The STAR Panel for canary rockfish number of reporting requirements and darkblotched rockfish will be held This meeting is physically accessible necessary to end overfishing, rebuild the Hotel Deca, 4507 Brooklyn Avenue to people with disabilities. Requests for overfished groundfish stocks, and NE., Seattle, WA 98105; telephone: sign language interpretation or other mitigate the adverse economic impacts (206) 634–2000. auxiliary aids should be directed to Mr. of increased effort controls. This The STAR Panel for the bocaccio and Kris Kleinschmidt at (503) 820–2425 at revision proposes to modify only the China rockfish stock assessments will be least 5 days prior to the meeting date. broad stock area reporting requirements held at the NMFS, Southwest Fisheries Dated: April 8, 2015. currently approved under the Science Center, Santa Cruz Laboratory, Information Collection for Amendment 110 Shaffer Road, Santa Cruz, CA William D. Chappell, Acting Deputy Director, Office of Sustainable 16. We are seeking comments on a 95060; telephone: (831) 420–3900. provision that, if approved, would The STAR Panels for the black Fisheries, National Marine Fisheries Service. -

Congressional Record United States Th of America PROCEEDINGS and DEBATES of the 104 CONGRESS, SECOND SESSION
E PL UR UM IB N U U S Congressional Record United States th of America PROCEEDINGS AND DEBATES OF THE 104 CONGRESS, SECOND SESSION Vol. 142 WASHINGTON, MONDAY, JANUARY 22, 1996 No. 7 House of Representatives The House met at 2 p.m. and was come forward and lead the House in the JOINT SESSION OF CONGRESSÐ called to order by the Speaker pro tem- Pledge of Allegiance. STATE OF THE UNION ADDRESS pore [Mr. EVERETT]. Mr. SMITH of Texas led the Pledge of The SPEAKER pro tempore laid be- f Allegiance as follows: fore the House a Senate concurrent res- DESIGNATION OF THE SPEAKER I pledge allegiance to the Flag of the olution (S. Con. Res. 39), which was United States of America, and to the Repub- read by the Clerk, as follows: PRO TEMPORE lic for which it stands, one nation under God, S. CON. RES. 39 The SPEAKER pro tempore laid be- indivisible, with liberty and justice for all. fore the House the following commu- Resolved by the Senate (the House of Rep- f resentatives concurring), That the two Houses nication from the Speaker: MESSAGE FROM THE PRESIDENT of Congress assemble in the Hall of the WASHINGTON, DC, House of Representatives on Tuesday, Janu- January 22, 1996. A message in writing from the Presi- ary 23, 1996, at 9 p.m., for the purpose of re- I hereby designate the Honorable Terry Ev- dent of the United States was commu- ceiving such communication as the Presi- erett to act as Speaker pro tempore on this nicated to the House by Mr. -

Cruise Missile Defense Systems
MISSILES AND SPACE PROGRAMS fense (IAMD) acquisition approach will en- 114M); and a metal augmented charge sure that the materiel solutions for the (MAC) warhead (AGM-114N) for urban The PEO Missiles and Space provides Army’s AMD Future Force will provide the structures, bunk ers, radar and communica- centralized management for all Army air capabilities required by the warfighter. tions installations, and bridges. and missile defense and tactical missile In 2012, a multipurpose missile (AGM- programs as well as selected Army space Joint Attack Munition Systems 114R) began delivery, which allows the pilot programs. The PEO is responsible for the (JAMS) to select warhead effects corresponding to full life-cycle management of assigned pro- The Joint Attack Munition Systems the target. UAS or rotary-wing platforms grams. (JAMS) Project Office manages all Army can deliver the AGM-114R. The PEO Missiles and Space reports to aviation rockets and missiles. The current The Longbow Hellfire (AGM-114L) is also the Army Acquisition Executive and is programs include the 2.75-inch Hydra 70 a precision-strike missile, but uses millime- aligned with the Aviation and Missile Life family of rockets, the Hellfire family of ter wave (MMW) radar guidance instead of Cycle Management Command at Redstone missiles and the Joint Air-to-Ground Mis- Hellfire II’s SAL. It is the principal antitank Arsenal, Ala. This materiel enterprise rela- sile (JAGM). system for the AH-64D Apache Longbow tionship enhances the PEO’s ability to pro- The 2.75-inch (70 mm) Hydra 70 Rocket and uses the same antiarmor warhead as vide the world’s finest support to our Family encompasses variants of the free- Hellfire II. -

STATEMENT of TREATIES and INTERNATIONAL AGREEMENTS Registered Or Filed and Recorded with the Secretariat During the Month of November 2005
ST/LEG/SER.A/705 600 lemoisdenovembre2005 themonthofovember2005 STATEMENT OF TREATIES AND INTERNATIONAL AGREEMENTS Registered or filed and recorded with the Secretariat during the month of November 2005 RELEVÉ DES TRAITÉS ET ACCORDS INTERNATIONAUX Enregistrés ou classés et inscrits au répertoire au Secrétariat pendant le mois de novembre 2005 UNITED NATIONS l NATIONS UNIES 2005 ST/LEG/SER.A/705 600 lemoisdenovembre2005 themonthofovember2005 2005 600 lemoisdenovembre2005 themonthofovember2005 2005 STATEMENT OF TREATIES AND INTERNATIONAL AGREEMENTS Registered or filed and recorded with the Secretariat during the month of November 2005 RELEVÉ DES TRAITÉS ET ACCORDS INTERNATIONAUX Enregistrés ou classés et inscrits au répertoire au Secrétariat pendant le mois de novembre 2005 UNITED NATIONS l NATIONS UNIES New York, 2005 Copyright United Nations 2005 All rights reserved Printed by the United Nations Reproduction Section, New York Copyright Nations Unies 2005 Tous droits réservés Imprimé par la Section de la reproduction des Nations Unies, New York TABLE OF CONTENTS Note by the Secretariat. 5 Part I. Original treaties and international agreements registered during the month of November 2005: Nos. 41939 to 42068. 7 Part II. Original treaties and international agreements filed and recorded during the month of November 2005: No. 1284. 23 Annex A. Ratifications, accessions, subsequent agreements, etc., concerning treaties and international agreements registered with the Secretariat . 24 Addenda to Statements of Treaties and International Agreements registered or filed and recorded with the Secretariat . 41 Alphabetical Index. 43 TABLE DES MATIÈRES Note du Secrétariat. 53 Partie I. Traités et accords internationaux enregistrés pendant le mois de novembre 2005: Nos 41939 à 42068 . 55 Partie II. -

THE ARMY LAWYER Headquarters, Department of the Army
THE ARMY LAWYER Headquarters, Department of the Army Department of the Army Pamphlet 27-50-338 January 2001 Contract and Fiscal Law Developments of 2000—The Year in Review Major Louis A. Chiarella, Lieutenant Colonel Timothy J. Pendolino, Lieutenant Colonel Elizabeth D. Berrigan, Major John J. Siemietkowski, Major Jonathan C. Guden, Major Kevin M. Walker, Major Karen S. White (USAF), Colonel Jonathan H. Kosarin, Lieutenant Colonel Steven N. Tomanelli (USAF), Lieutenant Colonel M. Warner Meadows (USAF), Lieutenant Colonel Mary E. Harney (USAF), Ms. Margaret K. Patterson, Major Corey L. Bradley Contents Foreword Contract Formation (Authority; Competition; Contract Types; Sealed Bidding; Negotiated Acquisitions; Simplified Acquisitions; Commercial Items; Small Business; Labor Standards; Bid Protests) Contract Performance (Contract Interpretation; Contract Changes; Inspection, Acceptance, and Warranties; Pricing of Adjustments; Termination for Default; Termination for Convenience; Contract Disputes Act (CDA) Litigation) Special Topics (Competitive Sourcing and Privatization; Construction Contracting; Cost and Cost Accounting Standards; Defective Pricing; Deployment Contracting; Environmental Contracting; Ethics in Government Contracting; Foreign Military Sales; Freedom of Information Act; Government Furnished Property; Information Technology; Payment and Collection; Performance-Based Service Contracting; Procurement Fraud; Randolph-Sheppard; Taxation) Fiscal Law (Purpose; Antideficiency Act; Construction Funding; Liability of Accountable Officers; Nonappropriated Funds; Operational and Contingency Funding) Conclusion Appendix A: Department of Defense Legislation for Fiscal Year 2001 Appendix B: Contract and Fiscal Law Websites Editor, Captain Gary P. Corn Technical Editor, Charles J. Strong The Army Lawyer (ISSN 0364-1287, USPS 490-330) is published monthly ed. 2000) and Military Citation (TJAGSA, July 1997). Manuscripts will be by The Judge Advocate General’s School, U.S. -

NASA Aeronautical Engineering Sring Aeronautical Engir Iqineering Aeronautical Engim Engineering Aeronautical E ' Ngineering
Aeronautical NASA SP-7037(150) Engineering July 1982 A Continuing NASA Bibliography with Indexes National Aeronautics and Space Administration (NASA-SP-7037(150» AERONAUTICAL N8^ ENGiNELKING: A CONTINUING BIBLIOGRAPHY allfl J1NUEXES (National Aeronautics and Space Administration) 114 p HC >5.00 CSCL 01A Oncias Aeronautical Engineering sring Aeronautical Engir iqineering Aeronautical Engim Engineering Aeronautical E ' ngineering Aeronaut " Engineering Aerc ing Aeronautical Engir (Sneering Aeronautical bngm il Engineering Aeronautical E lutical Engineering Aeronaut eronautical Engineering Aerc ing Aeronautical Engir ACCESSION NUMBER RANGES ........ Accession numbers efte<i in this Supplement fait within the following ranges, STAR (N-100Q0 Series) N82-2Q139 - N82-22140 IAA (A-10000 Series) A82-25S39 - A82-28538 This bibliography was pmpared by the NASA Scientific and Techracaj Informatioft facility operated for the National Aeronautics and Space Administration by PRO Government Information Systems. NASASP-7037(150) AERONAUTICAL ENGINEERING A CONTINUING BIBLIOGRAPHY WITH INDEXES (Supplement 150) A selection of annotated references to unclassified reports and journal articles that were introduced into the NASA scientific and technical information sys- tem and announced in June 1982 in • Scientific and Technical Aerospace Reports (STAR) • International Aerospace Abstracts (IAA). f\ I /\CIZ/\ Scientific and Technical Information Branch 1982 I \l/ lID/ 1 National Aeronautics and Space Administration Washington, DC This supplement is available as NTISUB 141.093 from the National Technical Information Service (NTIS), Springfield, Virginia 22161 at the price of S5.00 domestic; S10.00 foreign. INTRODUCTION Under the terms of an interagency agreement with the Federal Aviation Administration this publication has been prepared by the National Aeronautics and Space Administration for the joint use of both agencies and the scientific and technical community concerned with the field of aeronautical engineering. -
Applications
An invitation to AHS Award Nomination Form Nominations are due by February 26 honor Please nominate online at www.vtol.org/awards-and contests/awards-nomination. innovation and If you are not able to register online, please contact Liz Malleck at (703) 684-6777 x107 excellence for a paper form. in vertical flight technology and its applications The AHS International Awards Program AHS International has a tradition for honoring the vertical flight industry’s most outstanding achievements. Established in 1944, the Society’s Awards Program provides an international showcase for the finest work and research in the industry. Whether it be for a single outstanding contribution or achievement, a major technical innovation, an act of heroism, long and valued service or work that further advances the frontiers of vertical flight technology and its applications, the Society’s awards attract worldwide recognition. Who is eligible for an award? The Society’s Awards recognize achievement at all levels and in all disciplines. Anyone working in the vertical flight industry, anywhere in the world, whether in academia, airframes, engines, systems, the military services, government, research, manufacturing, or in civil and commercial operations or in any other discipline involved in vertical flight is eligible. The Awards Program is structured to recognize individuals at various stages of their careers. Who makes the nominations? he simple answer is you do. You have an important and responsible role to play in identifying those of your colleagues deserving of special T recognition. If there is someone, or a group of persons, you feel is making an outstanding contribution to the world of vertical flight, please read through this brochure, select the appropriate award and make your recommendation. -
Northrop F-5 E/F, CF-5D
Northrop F-5 E/F, CF-5D Description The F-5E is a single seat, twin-engine, tactical fghtee ann attack aieceaft. peovining simulaten aie-to-aie combat teaining, close-aie suppoet teaining, tactics nevelopment ann evaluation suppoet, manufactueen by Noetheop Geumman Coepoeation. The F-5F is a nual-seat veesion, twin-engine, tactical fghtee commonly usen foe teaining ann anveesaey combat tactics. The aieceaft can ably seeve in an aggeessoe teaining eole with simulation capability of cueeent theeat aieceaft in fghtee combat mone. The CF-FD is the nual-seat Cananian veesion of the F-5 monifen to ft specifc Cananian eequieements. Fleet TacAie owns ann opeeates a feet of 26 supeesonic F-5 fghtee aieceaft, laegely consisting of an impeoven, lowee fight-time veesion of the cueeent Anveesaey platfoem of the U.S. Navy (USN) ann Maeine Coeps (USMC). TacAie has opeeaten F-5 aieceaft since 2013. The F-5 is a peoven Anveesaey aieceaft also foemeely usen by the USAF in this eole ann cueeently opeeational with 19 inteenational aie foeces. While the baseline F-5 fown by USN/USMC is winely consineeen a 3en Geneeation aieceaft, TacAie’s existing ann plannen upgeanes economically evolve this aieceaft into an anvancen tactical aieceaft with sensoe/system capabilities on pae with cueeent DoD 4th Geneeation fghtee aieceaft. TacAie F-5s aee upgeanen with HUD/HOTAS, open aechitectuee mission computees ann tailoeen Opeeational Flight Peogeams that enable integeation of anvancen eanae systems, IRSTS, EA, RWR, natalinks, ann HOBS simulaten weapons employment. TheF-5’s peoven geowth potential ann twin-engine eeliability, paieen with oue uncompeomising coepoeate safety cultuee, is the best insueance against hazaens ann mishaps, ann lets us meet almost any potential peefoemance eequieements. -

Historical Perspective Boeing Frontiers / September 2010 11
e was eccentric and controversial, and wealthy almost beyond measure, a “ I want to be maverick businessman and Hollywood movie producer who in his later years The need for Hbecame a recluse. remembered for But Howard Hughes Jr. also was passionate about aviation, an aerospace pioneer and record-setting pilot who left a legacy of companies and accomplishments that only one thing— shaped the future of Boeing, and of airplanes that advanced aircraft design and flight and are a part of aviation history. my contribution This month marks the 75th anniversary of a record-breaking performance by one of those airplanes, the H-1 Racer. On Sept. 13, 1935, Hughes piloted the H-1 at 352 mph to aviation.” (566 kph) over a measured speed course near Santa Ana, Calif., shattering the existing – Howard Hughes international record of 314 mph (505 kph). It was the H-1 that gave birth to Hughes Aircraft Co., which was established that speed same year. Boeing’s satellite business in El Segundo, Calif., and its helicopter business in Mesa, Ariz., have their roots in the aviation company Hughes founded. But the connection between Boeing and Howard Hughes goes back even further. Hughes was born in Houston in 1905, the son of a wealthy oil industrialist. By 1931, the young Hughes was already a well-known motion picture producer and an emerging pilot with a passion for speed and an eye for accuracy and detail. He admired Charles Lindbergh and had started to make a name for himself as an aviator with a Boeing airplane, the 100A.