Convexity, Rigidity, and Reduction of Codimension of Isometric
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Basics of the Differential Geometry of Surfaces
Chapter 20 Basics of the Differential Geometry of Surfaces 20.1 Introduction The purpose of this chapter is to introduce the reader to some elementary concepts of the differential geometry of surfaces. Our goal is rather modest: We simply want to introduce the concepts needed to understand the notion of Gaussian curvature, mean curvature, principal curvatures, and geodesic lines. Almost all of the material presented in this chapter is based on lectures given by Eugenio Calabi in an upper undergraduate differential geometry course offered in the fall of 1994. Most of the topics covered in this course have been included, except a presentation of the global Gauss–Bonnet–Hopf theorem, some material on special coordinate systems, and Hilbert’s theorem on surfaces of constant negative curvature. What is a surface? A precise answer cannot really be given without introducing the concept of a manifold. An informal answer is to say that a surface is a set of points in R3 such that for every point p on the surface there is a small (perhaps very small) neighborhood U of p that is continuously deformable into a little flat open disk. Thus, a surface should really have some topology. Also,locally,unlessthe point p is “singular,” the surface looks like a plane. Properties of surfaces can be classified into local properties and global prop- erties.Intheolderliterature,thestudyoflocalpropertieswascalled geometry in the small,andthestudyofglobalpropertieswascalledgeometry in the large.Lo- cal properties are the properties that hold in a small neighborhood of a point on a surface. Curvature is a local property. Local properties canbestudiedmoreconve- niently by assuming that the surface is parametrized locally. -

Shapewright: Finite Element Based Free-Form Shape Design
ShapeWright: Finite Element Based Free-Form Shape Design by George Celniker S.M., Mechanical Engineering Massachusetts Institute of Technology January, 1981 B.S., Mechanical Engineering Massachusetts Institute of Technology May, 1979 Submitted to the Department of Mechanical Engineering in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Mechanical Engineering at the Massachusetts Institute of Technology September, 1990 © Massachusetts Institute of Technology, 1990, All rights reserved. Signature of Author . ... , , , Department of Mechariical Engineering August 3, 1990 Certified by Professor David C. Gossard Thesis Supervisor Accepted by Ain A. Sonin Chairman, Department Committee MASSACHUITTS INSTITOiI OF TECHIvn .:.. NOV 0 8 1990 LIBRARIEb ShapeWright: Finite Element Based Free-Form Shape Design by George Celniker Submitted to the Department of Mechanical Engineering on September, 1990 inpartial fulfillment of the requirements for the degree of Doctor of Philosophy inMechanical Engineering. Abstract The mathematical foundations and an implementation of a new free-form shape design paradigm are developed. The finite element method is applied to generate shapes that minimize a surface energy function subject to user-specified geometric constraints while responding to user-specified forces. Because of the energy minimization these surfaces opportunistically seek globally fair shapes. It is proposed that shape fairness is a global and not a local property. Very fair shapes with C1 continuity are designed. Two finite elements, a curve segment and a triangular surface element, are developed and used as the geometric primitives of the approach. The curve segments yield piecewise C1 Hermite cubic polynomials. The surface element edges have cubic variations in position and parabolic variations in surface normal and can be combined to yield piecewise C1 surfaces. -

Fundamental Forms of Surfaces and the Gauss-Bonnet Theorem
FUNDAMENTAL FORMS OF SURFACES AND THE GAUSS-BONNET THEOREM HUNTER S. CHASE Abstract. We define the first and second fundamental forms of surfaces, ex- ploring their properties as they relate to measuring arc lengths and areas, identifying isometric surfaces, and finding extrema. These forms can be used to define the Gaussian curvature, which is, unlike the first and second fun- damental forms, independent of the parametrization of the surface. Gauss's Egregious Theorem reveals more about the Gaussian curvature, that it de- pends only on the first fundamental form and thus identifies isometries be- tween surfaces. Finally, we present the Gauss-Bonnet Theorem, a remarkable theorem that, in its global form, relates the Gaussian curvature of the surface, a geometric property, to the Euler characteristic of the surface, a topological property. Contents 1. Surfaces and the First Fundamental Form 1 2. The Second Fundamental Form 5 3. Curvature 7 4. The Gauss-Bonnet Theorem 8 Acknowledgments 12 References 12 1. Surfaces and the First Fundamental Form We begin our study by examining two properties of surfaces in R3, called the first and second fundamental forms. First, however, we must understand what we are dealing with when we talk about a surface. Definition 1.1. A smooth surface in R3 is a subset X ⊂ R3 such that each point has a neighborhood U ⊂ X and a map r : V ! R3 from an open set V ⊂ R2 such that • r : V ! U is a homeomorphism. This means that r is a bijection that continously maps V into U, and that the inverse function r−1 exists and is continuous. -

The Second Fundamental Form. Geodesics. the Curvature Tensor
Differential Geometry Lia Vas The Second Fundamental Form. Geodesics. The Curvature Tensor. The Fundamental Theorem of Surfaces. Manifolds The Second Fundamental Form and the Christoffel symbols. Consider a surface x = @x @x x(u; v): Following the reasoning that x1 and x2 denote the derivatives @u and @v respectively, we denote the second derivatives @2x @2x @2x @2x @u2 by x11; @v@u by x12; @u@v by x21; and @v2 by x22: The terms xij; i; j = 1; 2 can be represented as a linear combination of tangential and normal component. Each of the vectors xij can be repre- sented as a combination of the tangent component (which itself is a combination of vectors x1 and x2) and the normal component (which is a multi- 1 2 ple of the unit normal vector n). Let Γij and Γij denote the coefficients of the tangent component and Lij denote the coefficient with n of vector xij: Thus, 1 2 P k xij = Γijx1 + Γijx2 + Lijn = k Γijxk + Lijn: The formula above is called the Gauss formula. k The coefficients Γij where i; j; k = 1; 2 are called Christoffel symbols and the coefficients Lij; i; j = 1; 2 are called the coefficients of the second fundamental form. Einstein notation and tensors. The term \Einstein notation" refers to the certain summation convention that appears often in differential geometry and its many applications. Consider a formula can be written in terms of a sum over an index that appears in subscript of one and superscript of P k the other variable. For example, xij = k Γijxk + Lijn: In cases like this the summation symbol is omitted. -

Differential Geometry
18.950 (Differential Geometry) Lecture Notes Evan Chen Fall 2015 This is MIT's undergraduate 18.950, instructed by Xin Zhou. The formal name for this class is “Differential Geometry". The permanent URL for this document is http://web.evanchen.cc/ coursework.html, along with all my other course notes. Contents 1 September 10, 20153 1.1 Curves...................................... 3 1.2 Surfaces..................................... 3 1.3 Parametrized Curves.............................. 4 2 September 15, 20155 2.1 Regular curves................................. 5 2.2 Arc Length Parametrization.......................... 6 2.3 Change of Orientation............................. 7 3 2.4 Vector Product in R ............................. 7 2.5 OH GOD NO.................................. 7 2.6 Concrete examples............................... 8 3 September 17, 20159 3.1 Always Cauchy-Schwarz............................ 9 3.2 Curvature.................................... 9 3.3 Torsion ..................................... 9 3.4 Frenet formulas................................. 10 3.5 Convenient Formulas.............................. 11 4 September 22, 2015 12 4.1 Signed Curvature................................ 12 4.2 Evolute of a Curve............................... 12 4.3 Isoperimetric Inequality............................ 13 5 September 24, 2015 15 5.1 Regular Surfaces................................ 15 5.2 Special Cases of Manifolds .......................... 15 6 September 29, 2015 and October 1, 2015 17 6.1 Local Parametrizations ........................... -
The Mean Curvature Flow of Submanifolds of High Codimension
The mean curvature flow of submanifolds of high codimension Charles Baker November 2010 arXiv:1104.4409v1 [math.DG] 22 Apr 2011 A thesis submitted for the degree of Doctor of Philosophy of the Australian National University For Gran and Dar Declaration The work in this thesis is my own except where otherwise stated. Charles Baker Abstract A geometric evolution equation is a partial differential equation that evolves some kind of geometric object in time. The protoype of all parabolic evolution equations is the familiar heat equation. For this reason parabolic geometric evolution equations are also called geometric heat flows or just geometric flows. The heat equation models the physical phenomenon whereby heat diffuses from regions of high temperature to regions of cooler temperature. A defining characteris- tic of this physical process, as one readily observes from our surrounds, is that it occurs smoothly: A hot cup of coffee left to stand will over a period of minutes smoothly equilibrate to the ambient temperature. In the case of a geometric flow, it is some kind of geometric object that diffuses smoothly down a driving gradient. The most natural extrinsically defined geometric heat flow is the mean curvature flow. This flow evolves regions of curves and surfaces with high curvature to regions of smaller curvature. For example, an ellipse with highly curved, pointed ends evolves to a circle, thus minimising the distribution of curvature. It is precisely this smoothing, energy- minimising characteristic that makes geometric flows powerful mathematical tools. From a pure mathematical perspective, this is a useful property because unknown and complicated objects can be smoothly deformed into well-known and easily understood objects. -
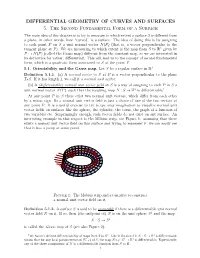
DIFFERENTIAL GEOMETRY of CURVES and SURFACES 5. the Second Fundamental Form of a Surface
DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES 5. The Second Fundamental Form of a Surface The main idea of this chapter is to try to measure to which extent a surface S is different from a plane, in other words, how “curved” is a surface. The idea of doing this is by assigning to each point P on S a unit normal vector N(P ) (that is, a vector perpendicular to the tangent plane at P ). We are measuring to which extent is the map from S to R3 given by P N(P ) (called the Gauss map) different from the constant map, so we are interested in its7→ derivative (or rather, differential). This will lead us to the concept of second fundamental form, which is a quadratic form associated to S at the point P . 5.1. Orientability and the Gauss map. Let S be a regular surface in R3. Definition 5.1.1. (a) A normal vector to S at P is a vector perpendicular to the plane TP S. If it has length 1, we call it a normal unit vector. (b) A (differentiable) normal unit vector field on S is a way of assigning to each P in S a unit normal vector N(P ), such that the resulting map N : S R3 is differentiable1. → At any point P in S there exist two normal unit vectors, which differ from each other by a minus sign. So a normal unit vector field is just a choice of one of the two vectors at any point P . It is a useful exercise to try to use ones imagination to visualize normal unit vector fields on surfaces like the sphere, the cylinder, the torus, the graph of a function of two variables etc. -

M435: Introduction to Differential Geometry
M435: INTRODUCTION TO DIFFERENTIAL GEOMETRY MARK POWELL Contents 5. Second fundamental form and the curvature 1 5.1. The second fundamental form 1 5.2. Second fundamental form alternative derivation 2 5.3. The shape operator 3 5.4. Principal curvature 5 5.5. The Theorema Egregium of Gauss 11 References 14 5. Second fundamental form and the curvature 5.1. The second fundamental form. We will give several ways of motivating the definition of the second fundamental form. Like the first fundamental form, the second fundamental form is a symmetric bilinear form on each tangent space of a surface Σ. Unlike the first, it need not be positive definite. The idea of the second fundamental form is to measure, in R3, how Σ curves away from its tangent plane at a given point. The first fundamental form is an intrinsic object whereas the second fundamental form is extrinsic. That is, it measures the surface as compared to the tangent plane in R3. By contrast the first fundamental form can be measured by a denizen of the surface, who does not possess 3 dimensional awareness. Given a smooth patch r: U ! Σ, let n be the unit normal vector as usual. Define R(u; v; t) := r(u; v) − tn(u; v); with t 2 (−"; "). This is a 1-parameter family of smooth surface patches. How is the first fundamental form changing in this family? We can compute that: 1 @ ( ) Edu2 + 2F dudv + Gdv2 = Ldu2 + 2Mdudv + Ndv2 2 @t t=0 where L := −ru · nu 2M := −(ru · nv + rv · nu) N := −rv · nv: The reason for the negative signs will become clear soon. -

DIFFERENTIAL GEOMETRY: a First Course in Curves and Surfaces
DIFFERENTIAL GEOMETRY: A First Course in Curves and Surfaces Preliminary Version Fall, 2015 Theodore Shifrin University of Georgia Dedicated to the memory of Shiing-Shen Chern, my adviser and friend c 2015 Theodore Shifrin No portion of this work may be reproduced in any form without written permission of the author, other than duplication at nominal cost for those readers or students desiring a hard copy. CONTENTS 1. CURVES.................... 1 1. Examples, Arclength Parametrization 1 2. Local Theory: Frenet Frame 10 3. SomeGlobalResults 23 2. SURFACES: LOCAL THEORY . 35 1. Parametrized Surfaces and the First Fundamental Form 35 2. The Gauss Map and the Second Fundamental Form 44 3. The Codazzi and Gauss Equations and the Fundamental Theorem of Surface Theory 57 4. Covariant Differentiation, Parallel Translation, and Geodesics 66 3. SURFACES: FURTHER TOPICS . 79 1. Holonomy and the Gauss-Bonnet Theorem 79 2. An Introduction to Hyperbolic Geometry 91 3. Surface Theory with Differential Forms 101 4. Calculus of Variations and Surfaces of Constant Mean Curvature 107 Appendix. REVIEW OF LINEAR ALGEBRA AND CALCULUS . 114 1. Linear Algebra Review 114 2. Calculus Review 116 3. Differential Equations 118 SOLUTIONS TO SELECTED EXERCISES . 121 INDEX ................... 124 Problems to which answers or hints are given at the back of the book are marked with an asterisk (*). Fundamental exercises that are particularly important (and to which reference is made later) are marked with a sharp (]). August, 2015 CHAPTER 1 Curves 1. Examples, Arclength Parametrization We say a vector function f .a; b/ R3 is Ck (k 0; 1; 2; : : :) if f and its first k derivatives, f , f ,..., W ! D 0 00 f.k/, exist and are all continuous. -

The Codazzi Equation for Surfaces ✩
Advances in Mathematics 224 (2010) 2511–2530 www.elsevier.com/locate/aim The Codazzi equation for surfaces ✩ Juan A. Aledo a,JoséM.Espinarb, José A. Gálvez c,∗ a Departamento de Matemáticas, Universidad de Castilla-La Mancha, EPSA, 02071 Albacete, Spain b Institut de Mathématiques, Université Paris VII, 175 Rue du Chevaleret, 75013 Paris, France c Departamento de Geometría y Topología, Facultad de Ciencias, Universidad de Granada, 18071 Granada, Spain Received 20 February 2009; accepted 9 February 2010 Available online 1 March 2010 Communicated by Gang Tian Abstract In this paper we study the classical Codazzi equation in space forms from an abstract point of view, and use it as an analytic tool to derive global results for surfaces in different ambient spaces. In particular, we study the existence of holomorphic quadratic differentials, the uniqueness of immersed spheres in geometric problems, height estimates, and the geometry and uniqueness of complete or properly embedded Weingarten surfaces. © 2010 Elsevier Inc. All rights reserved. Keywords: Codazzi equation; Holomorphic quadratic differentials; Height estimates; Uniqueness and completeness of surfaces 1. Introduction The Codazzi equation for an immersed surface Σ in Euclidean 3-space R3 yields ∇XSY −∇Y SX − S[X, Y ]=0,X,Y∈ X(Σ). (1) ✩ The first author is partially supported by Junta de Comunidades de Castilla-La Mancha, Grant No. PCI-08-0023. The second and third authors are partially supported by Grupo de Excelencia P06-FQM-01642 Junta de Andalucía. The authors are partially supported by MCYT-FEDER, Grant No. MTM2007-65249. * Corresponding author. E-mail addresses: [email protected] (J.A. -

Fundamental Equations for Hypersurfaces
Appendix A Fundamental Equations for Hypersurfaces In this appendix we consider submanifolds with codimension 1 of a pseudo- Riemannian manifold and derive, among other things, the important equations of Gauss and Codazzi–Mainardi. These have many useful applications, in particular for 3 + 1 splittings of Einstein’s equations (see Sect. 3.9). For definiteness, we consider a spacelike hypersurface Σ of a Lorentz manifold (M, g). Other situations, e.g., timelike hypersurfaces can be treated in the same way, with sign changes here and there. The formulation can also be generalized to sub- manifolds of codimension larger than 1 of arbitrary pseudo-Riemannian manifolds (see, for instance, [51]), a situation that occurs for instance in string theory. Let ι : Σ −→ M denote the embedding and let g¯ = ι∗g be the induced metric on Σ. The pair (Σ, g)¯ is a three-dimensional Riemannian manifold. Other quanti- ties which belong to Σ will often be indicated by a bar. The basic results of this appendix are most efficiently derived with the help of adapted moving frames and the structure equations of Cartan. So let {eμ} be an orthonormal frame on an open region of M, with the property that the ei ,fori = 1, 2, 3, at points of Σ are tangent μ to Σ. The dual basis of {eμ} is denoted by {θ }.OnΣ the {ei} can be regarded as a triad of Σ that is dual to the restrictions θ¯i := θ j |TΣ(i.e., the restrictions to tangent vectors of Σ). Indices for objects on Σ always refer to this pair of dual basis. -

Submanifolds with Parallel Second Fundamental Form Studied Via the Gauß Map
Submanifolds with parallel second fundamental form studied via the Gauß map Inaugural-Dissertation zur Erlangung des Doktorgrades der Mathematisch-Naturwissenschaftlichen Fakult¨at der Universit¨at zu K¨oln vorgelegt von Tillmann Jentsch aus Bergisch Gladbach Hundt Druck GmbH K¨oln 2006 Berichterstatter: Prof. Dr. H. Reckziegel Prof. Dr. G. Thorbergsson Tag der m¨undlichen Pr¨ufung: 12.07.2005 Vorwort Zun¨achst m¨ochte ich meinem Doktorvater, Herrn Professor Dr. H. Reckziegel, herzlich danken. Durch seine wissenschaftliche Anleitung und unsere enge Zusammenarbeit ist die Erstellung dieser Dissertation ¨uberhaupt erst m¨oglich geworden. Dabei hat er mir gen¨ugendFreir¨aume gelassen, um eigene Ideen entwickeln zu k¨onnen; auch daf¨ur m¨ochte ich ihm danken. Weiterer Dank gilt meinem Mitstreiter Dr. Sebastian Klein, der mir mit vielen n¨utzlichen Tips beratend zur Seite stand. Schließlich m¨ochte ich meinen Eltern danken, die mich nach M¨oglichkeit unterst¨utzthaben. i ii Abstract For an arbitrary n-dimensional riemannian manifold N and an integer m ∈ {1, . , n − 1} a covariant derivative ∇ˆ on the Graßmann bundle Nˆ := Gm(TN) is introduced which has the property that an m-dimensional submanifold M ⊂ N has parallel second fundamental form if n and only if its Gauß map M → Nˆ is affine. (For N = R this result was already obtained by J. Vilms in 1972.) By means of this relation a generalization of E.´ Cartan’s theorem on the total geodesy of a geodesic umbrella can be derived: Suppose, initial data (p, W, b) prescribing a tangent space W ∈ Gm(TpN) and a second fundamental form b at p ∈ N are given; for these data an m-dimensional “umbrella” M = MU (p, W, b) ⊂ N gets constructed, the rays of which are helical arcs of N ; moreover tensorial conditions (not involving ∇ˆ ) are presented, which guarantee that the umbrella M has parallel second fundamental form.