On-Chip Voltage Regulator– Circuit Design and Automation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

VOLTAGE REGULATORS 1. Zener Controlled Transistor Voltage Regulator
VOLTAGE REGULATORS A voltage regulator is a voltage stabilizer that is designed to automatically stabilize a constant voltage level. A voltage regulator circuit is also used to change or stabilize the voltage level according to the necessity of the circuit. Thus, a voltage regulator is used for two reasons:- 1. To regulate or vary the output voltage of the circuit. 2. To keep the output voltage constant at the desired value in-spite of variations in the supply voltage or in the load current. To know more on the basics of this subject, you may also refer Regulated Power Supply. Voltage regulators find their applications in computers, alternators, power generator plants where the circuit is used to control the output of the plant. Voltage regulators may be classified as electromechanical or electronic. It can also be classified as AC regulators or DC regulators. We have already explained about IC Voltage Regulators. Electronic Voltage Regulator All electronic voltage regulators will have a stable voltage reference source which is provided by the reverse breakdown voltage operating diode called zener diode. The main reason to use a voltage regulator is to maintain a constant dc output voltage. It also blocks the ac ripple voltage that cannot be blocked by the filter. A good voltage regulator may also include additional circuits for protection like short circuits, current limiting circuit, thermal shutdown, and over voltage protection. Electronic voltage regulators are designed by any of the three or a combination of any of the three regulators given below. 1. Zener Controlled Transistor Voltage Regulator A zener controlled voltage regulator is used when the efficiency of a regulated power supply becomes very low due to high current. -

Advantages of Using PMOS-Type Low-Dropout Linear Regulators in Battery Applications by Brian M
Power Management Texas Instruments Incorporated Advantages of using PMOS-type low-dropout linear regulators in battery applications By Brian M. King Applications Specialist Introduction Figure 1. Components of a typical The proliferation of battery-powered equipment has linear regulator increased the demand for low-dropout linear regulators (LDOs). LDOs are advantageous in these applications because they offer inexpensive, reliable solutions and require few components or little board area. The circuit model for a typical LDO consists of a pass element, sam- Pass pling network, voltage reference, error amplifier, and Element externally connected capacitors at the input and output of the device. Figure 1 shows the circuit blocks of a typical + Reference + + – Error linear regulator. The pass element is arguably the most Amplifier important part of the LDO in battery applications. The Sampling V V technology used for the pass element can increase the IN Network OUT useful life of the battery. The pass element can be either a bipolar transistor or a – – MOSFET. The general difference between these is how the pass element is driven. A bipolar pass element is a current-driven device, whereas the MOSFET is a voltage- driven device. In addition, the pass element can be either an N-type (NPN or NMOS) or a P-type (PNP or PMOS) device. N-type devices require a positive drive signal with respect to the output, while P-type devices are driven from a negative signal with respect to the input. Generating a positive drive signal becomes difficult at low input voltages. PMOS pass elements much more attractive than PNP pass As a result, LDOs that operate from low input voltages elements. -
Voltage Regulators
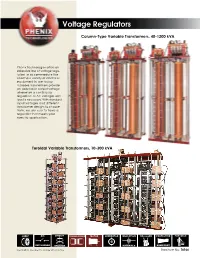
Voltage Regulators Column-Type Variable Transformers, 40-1200 kVA Phenix Technologies offers an extensive line of voltage regu- lators to accommodate the enormous variety of electrical equipment in use today. Variable transformers provide an adjustable output voltage whenever a continuous regulation of AC voltages with load is necessary. With standard input voltages and different transformer designs to choose from, we are sure to have a regulator that meets your specific application. Toroidal Variable Transformers, 10-300 kVA CABLE GIS CIRCUIT TRANSFORMER MOTOR GENERATOR INSULATION RECLOSER PROTECTIVE PORTABLE G SWITCHGEAR BREAKER MATERIALS EQUIPMENT Specifications are subject to change without notice. Brochure No. 70106 TOROIDAL VARIABLE TRANSFORMERS (TOVT) • Continuously adjustable output voltage for inputs ranging from 120 to 600 Volts AC • Provides output voltage as a percentage of input voltage over a range of either 0-100% or 0-117% • Applications include test equipment and lab instruments, as well as an enormous variety of power supplies Description TOVTs are a simple and efficient auto-transformer distinguished by their unique shape. Copper windings encompass a toroidal, or “doughnut” shaped core, to form a toroidal helix. The outer face of the windings is Single Stack exposed to provide a path for current collection. A carbon brush traverses the windings by means of output voltage selector, or “swinger”. The swinger originates at the center of the toroid and rotates a maximum of 318 degrees about the face of the transformer. The result is an output voltage that varies linearly in proportion to the angle of rotation of the swinger. By stacking multiple transformers on a common shaft and wiring them in series and/or parallel, the line voltage may be doubled and the current and kVA rating increased accordingly. -

LM2595 SIMPLE SWITCHER Power Converter 150 Khz 1A Step
LM2595 www.ti.com SNVS122B –MAY 1999–REVISED APRIL 2013 LM2595 SIMPLE SWITCHER® Power Converter 150 kHz 1A Step-Down Voltage Regulator Check for Samples: LM2595 1FEATURES DESCRIPTION The LM2595 series of regulators are monolithic 23• 3.3V, 5V, 12V, and Adjustable Output Versions integrated circuits that provide all the active functions • Adjustable Version Output Voltage Range, for a step-down (buck) switching regulator, capable of 1.2V to 37V ±4% Max Over Line and Load driving a 1A load with excellent line and load Conditions regulation. These devices are available in fixed output • Available in TO-220 and TO-263 (Surface voltages of 3.3V, 5V, 12V, and an adjustable output Mount) Packages version. • Ensured 1A Output Load Current Requiring a minimum number of external • Input Voltage Range Up to 40V components, these regulators are simple to use and include internal frequency compensation†, and a • Requires Only 4 External Components fixed-frequency oscillator. • Excellent Line and Load Regulation Specifications The LM2595 series operates at a switching frequency of 150 kHz thus allowing smaller sized filter • 150 kHz Fixed Frequency Internal Oscillator components than what would be needed with lower • TTL Shutdown Capability frequency switching regulators. Available in a • Low Power Standby Mode, I Typically 85 μA standard 5-lead TO-220 package with several Q different lead bend options, and a 5-lead TO-263 • High Efficiency surface mount package. Typically, for output voltages • Uses Readily Available Standard Inductors less than 12V, and ambient temperatures less than • Thermal Shutdown and Current Limit 50°C, no heat sink is required. -

A Two-Module Linear Regulator with 3.9–10 V Input, 2.5 V Output, and 500 Ma Load
electronics Article A Two-Module Linear Regulator with 3.9–10 V Input, 2.5 V Output, and 500 mA Load Quanzhen Duan 1, Weidong Li 1, Shengming Huang 1,*, Yuemin Ding 2,*, Zhen Meng 3 and Kai Shi 2 1 School of Electrical and Electronic Engineering and Tianjin Key Laboratory of Film Electronic and Communication Devices, Tianjin University of Technology, Tianjin 300384, China; [email protected] (Q.D.); [email protected] (W.L.) 2 School of Computer and Science Engineering, Tianjin University of Technology, Tianjin 300384, China; [email protected] 3 Institute of Microelectronics of the Chinese Academy of Sciences, Beijing 100029, China; [email protected] * Correspondence: [email protected] (S.H.); [email protected] (Y.D.) Received: 7 September 2019; Accepted: 4 October 2019; Published: 10 October 2019 Abstract: A linear regulator with an input range of 3.9–10 V, 2.5 V output, and a maximal 500 mA load for use with battery systems was developed and presented here. The linear regulator featured two modules of a preregulator and a linear regulator core circuit, offering minimized power dissipation and high-level stability. The preregulator delivered an internal power voltage of 3 V and supplied internal circuits including the second module (the linear regulator core). The preregulator fitted with an active, low-pass filter provided a low-noise reference voltage to the linear regulator core circuit. To ensure operational stability for the linear regulator, error amplifiers incorporating the Miller compensation technique and featuring a large slewing rate were employed in the two modules. -

LM2596 SIMPLE SWITCHER Power Converter 150 Khz3a Step-Down
Distributed by: www.Jameco.com ✦ 1-800-831-4242 The content and copyrights of the attached material are the property of its owner. LM2596 SIMPLE SWITCHER Power Converter 150 kHz 3A Step-Down Voltage Regulator May 2002 LM2596 SIMPLE SWITCHER® Power Converter 150 kHz 3A Step-Down Voltage Regulator General Description Features The LM2596 series of regulators are monolithic integrated n 3.3V, 5V, 12V, and adjustable output versions circuits that provide all the active functions for a step-down n Adjustable version output voltage range, 1.2V to 37V (buck) switching regulator, capable of driving a 3A load with ±4% max over line and load conditions excellent line and load regulation. These devices are avail- n Available in TO-220 and TO-263 packages able in fixed output voltages of 3.3V, 5V, 12V, and an adjust- n Guaranteed 3A output load current able output version. n Input voltage range up to 40V Requiring a minimum number of external components, these n Requires only 4 external components regulators are simple to use and include internal frequency n Excellent line and load regulation specifications compensation†, and a fixed-frequency oscillator. n 150 kHz fixed frequency internal oscillator The LM2596 series operates at a switching frequency of n TTL shutdown capability 150 kHz thus allowing smaller sized filter components than n Low power standby mode, I typically 80 µA what would be needed with lower frequency switching regu- Q n lators. Available in a standard 5-lead TO-220 package with High efficiency several different lead bend options, and a 5-lead TO-263 n Uses readily available standard inductors surface mount package. -

1724D-114 Rd-Gd-2017-90
Disclaimer: The contents of this guidance document does not have the force and effect of law and is not meant to bind the public in any way. This document is intended only to provide clarity to the public regarding existing requirements under the law or agency policies. UNITED STATES DEPARTMENT OF AGRICULTURE RURAL UTILITIES SERVICE BULLETIN 1724D-114 RD-GD-2017-90 SUBJECT: Voltage Regulator Application on Rural Distribution Systems TO: RUS Electric Borrowers and RUS Electric Staff EFFECTIVE DATE: Date of Approval. OFFICE OF PRIMARY INTEREST: Electric Staff Division. INSTRUCTIONS: This is a new bulletin. AVAILABILITY: This bulletin is available on the Rural Utilities Service (RUS) website at: www.rd.usda.gov/publications/regulations-guidelines/bulletins/electric. PURPOSE: This bulletin provides fundamental information about voltage regulators, their controls, and their application on rural distribution systems for Rural Utilities Service (RUS) borrowers and others. December 4, 2017 Date Bulletin 1724D-114 Page 2 1 INTRODUCTION ...................................................................................................................4 2 VOLTAGE STANDARDS ......................................................................................................4 3 VOLTAGE REGULATION ON DISTRIBUTION SYSTEMS .............................................6 4 VOLTAGE REGULATORS ...................................................................................................9 5 SUBSTATION VOLTAGE REGULATORS AND SYSTEM VOLTAGE LEVELS .........26 -

Analysis of Low Voltage Regulator Efficiency Based
ANALYSIS OF LOW VOLTAGE REGULATOR EFFICIENCY BASED ON FERRITE INDUCTOR by MRIDULA KOTHAKONDA A THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in the Department of Electrical and Computer Engineering in the Graduate School of The University of Alabama TUSCALOOSA, ALABAMA 2010 Copyright Mridula Kothakonda 2010 ALL RIGHTS RESERVED ABSTRACT Low voltage regulator based on ferrite inductor, using single- and two-phase topologies, were designed and simulated in MATLAB. Simulated values of output voltage and current were used to evaluate the buck converter (i.e., low voltage regulator) for power efficiency and percentage ripple reduction at frequencies between 1 and 10 MHz with variable loads from 0.024 to 4 Ω. The parameters, such as inductance of 20 nH, quality factor of 15 of fabricated ferrite inductor and DC resistance (DCR) of 8.3 mΩ, were used for efficiency analysis of the converter. High current around 40 A was achieved by the converter at low load values. Low output voltage in the range of 0.8-1.2 V was achieved. The simulated results for the single- and two- phase converter were compared for maximum efficiency and lowest ripple in output voltage and current. The maximum efficiency of 97 % with load of 0.33 Ω and the lowest ripple current of about 2.3 mA were estimated for the two-phase converter at 10 MHz. In summary, the two- phase converter showed higher efficiency and lower ripple voltage and current than those of the single-phase converter. In addition, the efficiency of single- and two-phase converters based on ferrite inductor was compared to single- and two-phase converters based on air-core inductor. -

AN-1099 Application Note
AN-1099 APPLICATION NOTE One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com Capacitor Selection Guidelines for Analog Devices, Inc., LDOs by Glenn Morita WHY DOES THE CHOICE OF CAPACITOR MATTER? Applications such as VCOs, PLLS, RF PAs, and low level analog Capacitors are underrated. They do not have transistor counts signal chains are very sensitive to noise on the power supply in the billions nor do they use the latest submicron fabrication rail. The noise manifests itself as phase noise in the case of technology. In the minds of many engineers, a capacitor is VCOs and PLLs and amplitude modulation of the carrier for simply two conductors separated by a dielectric. In short, RF PAs. In low level signal chain applications such as EEG, they are one of the lowliest electronic components. ultrasound, and CAT scan preamps, noise results in artifacts displayed in the output of these instruments. In these and It is common for engineers to add a few capacitors to solve other noise sensitive applications, the use of multilayer noise problems. This is because capacitors are widely seen by ceramic capacitors must be carefully evaluated. engineers as a panacea for solving noise related issues. Other than the capacitance and voltage rating, little thought is given Taking the temperature and voltage effects is extremely to any other parameter. However, like all electronic compo- important when selecting a ceramic capacitor. The Multilayer nents, capacitors are not perfect and possess parasitic resistance, Ceramic Capacitor Selection section explains the process of inductance, capacitance variation over temperature and voltage determining the minimum capacitance of a capacitor based bias, and other nonideal properties. -

AN-500: Depletion-Mode Power Mosfets and Applications
INTEGRATED CIRCUITS DIVISION Application Note AN-500 Depletion-Mode Power MOSFETs and Applications AN-500-R03 www.ixysic.com 1 INTEGRATED CIRCUITS DIVISION AN-500 1 Introduction Applications like constant current sources, solid state relays, and high voltage DC lines in power systems require N-channel depletion-mode power MOSFETs that operate as normally-on switches when the gate-to-source voltage is zero (VGS=0V). This paper will describe IXYS IC Division’s latest N-channel, depletion-mode, power MOSFETs and their application advantages to help designers to select these devices in many industrial applications. Figure 1 N-Channel Depletion-Mode MOSFET D ID + G V + DS IG V - GS I - S S A circuit symbol for an N-channel depletion-mode power MOSFET is given in Figure 1. The terminals are labeled as G (gate), S (source) and D (drain). IXYS IC Division depletion-mode power MOSFETs are built with a structure called vertical double-diffused MOSFET, or DMOSFET, and have better performance characteristics when compared to other depletion-mode power MOSFETs on the market such as high VDSX, high current, and high forward biased safe operating area (FBSOA). Figure 2 shows a typical drain current characteristic, ID, versus the drain-to-source voltage, VDS, which is called the output characteristic. It’s a similar plot to that of an N-channel enhancement mode power MOSFET except that it has current lines at VGS equal to -2V, -1.5V, -1V, and 0V. Figure 2 CPC3710 - MOSFET Output Characteristics Output Characteristics (TA=25ºC) 300 270 VGS=0.0V 240 210 V =-1.0V 180 GS 150 (mA) D I 120 V =-1.5V 90 GS 60 V =-2.0V 30 GS 0 0123456 VDS (V) The on-state drain current, IDSS, a parameter defined in the datasheet, is the current that flows between the drain and the source at a particular drain-to-source voltage (VDS), when the gate-to-source voltage (VGS) is zero (or short-circuited). -

IXYS P-Channel Power Mosfets and Applications Abdus Sattar, Kyoung-Wook Seok, IXAN0064
IXYS P-channel Power MOSFETs and Applications Abdus Sattar, Kyoung-Wook Seok, IXAN0064 Introduction: IXYS P-Channel Power MOSFETs retain all the features of comparable N-Channel Power MOSFETs such as very fast switching, voltage control, ease of paralleling and excellent temperature stability. These are designed for applications that require the convenience of reverse polarity operation. They have an n-type body region that provides lower resistivity in the body region and good avalanche characteristics because parasitic PNP transistor is less prone to turn-on [1]. In comparison with N- channel Power MOSFETs with similar design features, P-channel Power MOSFETs have better FBSOA (Forward Bias Safe Operating Area) and practically immune to Single Event Burnout phenomena [2]. Main advantage of P-channel Power MOSFETs is the simplified gate driving technique in high-side (HS) switch position [3]. The source voltage of P-channel device is stationary when the device operates as a HS switch. On the other hand, the source voltage of N-channel device used as HS switch varies between the low-side (LS) and the HS of the DC bus voltage. So, to drive an N-channel device, an isolated gate driver or a pulse transformer must be used. The driver requires an additional power supply, while the transformer can sometimes produce incorrect operations. However, in many cases the LS gate driver can drive the P-channel HS switch with very simple level shifting circuit. Doing this simplifies the circuit and often reduces the overall cost. Main disadvantage of P- channel device is relatively high Rds(on) in comparison with that of N-channel device. -

Basic Linear Design Seminar
POWER MANAGEMENT CHAPTER 9: POWER MANAGEMENT INTRODUCTION 9.1 SECTION 9.1: LINEAR VOLTAGE REGULATORS 9.3 LINEAR REGULATOR BASICS 9.3 PASS DEVICES AND THEIR ASSOCIATED TRADE-OFFS 9.5 LOW DROPOUT REGULATOR ARCHITECTURES 9.9 THE anyCAP LOW DROPOUT REGULATOR FAMILY 9.13 DESIGN FEATURES RELATED TO DC PERFORMANCE 9.13 DESIGN FEATURES RELATED TO AC PERFORMANCE 9.15 THE anyCAP POLE-SPLITTING TOPOLOGY 9.15 LDO REGULATOR THERMAL CONSIDERATIONS 9.17 REGULATOR CONTROLLER DIFFERENCES 9.20 A BASIC 5 V/1 A LDO REGULATOR CONTROLLER 9.21 SELECTING THE PASS DEVICE 9.22 THERMAL DESIGN 9.23 SENSING RESISTORS FOR LDO CONTROLLERS 9.23 PCB LAYOUT ISSUES 9.25 REFERENCES 9.26 SECTION 9.2: SWITCH MODE REGULATORS 9.27 INTRODUCTION 9.27 INDUCTOR AND CAPACITOR FUNDAMENTALS 9.28 IDEAL STEP-DOWN (BUCK) CONVERTER 9.31 IDEAL STEP-UP (BOOST) CONVERTER 9.36 BUCK-BOOST TOPOLOGIES 9.42 OTHER NONISOLATED SWITCHER TOPOLOGIES 9.44 ISOLATED SWITCHING REGULATOR TOPOLOGIES 9.45 SWITCH MODULATION TECHNIQUES 9.47 CONTROL TECHNIQUES 9.48 GATED OSCILLATOR (PULSE BURST MODULATION) CONTROL EXAMPLE 9.51 DIODE AND SWITCH CONSIDERATIONS 9.54 INDUCTOR CONSIDERATIONS 9.57 CAPACITOR CONSIDERATIONS 9.69 SWITCHING REGULATOR OUTPUT FILTERING 9.76 SWITCHING REGULATOR INPUT FILTERING 9.77 REFERENCES 9.78 BASIC LINEAR DESIGN SECTION 9.3: SWITCHED CAPACITOR VOLTAGE CONVERTERS 9.81 INTRODUCTION 9.81 CHARGE TRANSFER USING CAPACITORS 9.83 UNREGULATED SWITCHED CAPACITOR INVERTER AND DOUBLER IMPLEMENTATIONS 9.87 VOLTAGE INVERTER AND DOUBLER DYNAMIC OPERATION 9.88 SWITCHED CAPACITOR VOLTAGE CONVERTER POWER LOSSES 9.90 REGULATOR OUTPUT SWITCHED CAPACITOR VOLTAGE CONVERTERS 9.92 POWER MANAGEMENT INTRODUCTION CHAPTER 9: POWER MANAGEMENT Introduction All electronic systems require power supplies to operate.