Cross Product Academic Resource Center in This Presentation…
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

DERIVATIONS and PROJECTIONS on JORDAN TRIPLES an Introduction to Nonassociative Algebra, Continuous Cohomology, and Quantum Functional Analysis
DERIVATIONS AND PROJECTIONS ON JORDAN TRIPLES An introduction to nonassociative algebra, continuous cohomology, and quantum functional analysis Bernard Russo July 29, 2014 This paper is an elaborated version of the material presented by the author in a three hour minicourse at V International Course of Mathematical Analysis in Andalusia, at Almeria, Spain September 12-16, 2011. The author wishes to thank the scientific committee for the opportunity to present the course and to the organizing committee for their hospitality. The author also personally thanks Antonio Peralta for his collegiality and encouragement. The minicourse on which this paper is based had its genesis in a series of talks the author had given to undergraduates at Fullerton College in California. I thank my former student Dana Clahane for his initiative in running the remarkable undergraduate research program at Fullerton College of which the seminar series is a part. With their knowledge only of the product rule for differentiation as a starting point, these enthusiastic students were introduced to some aspects of the esoteric subject of non associative algebra, including triple systems as well as algebras. Slides of these talks and of the minicourse lectures, as well as other related material, can be found at the author's website (www.math.uci.edu/∼brusso). Conversely, these undergraduate talks were motivated by the author's past and recent joint works on derivations of Jordan triples ([116],[117],[200]), which are among the many results discussed here. Part I (Derivations) is devoted to an exposition of the properties of derivations on various algebras and triple systems in finite and infinite dimensions, the primary questions addressed being whether the derivation is automatically continuous and to what extent it is an inner derivation. -

Triple Product Formula and the Subconvexity Bound of Triple Product L-Function in Level Aspect
TRIPLE PRODUCT FORMULA AND THE SUBCONVEXITY BOUND OF TRIPLE PRODUCT L-FUNCTION IN LEVEL ASPECT YUEKE HU Abstract. In this paper we derived a nice general formula for the local integrals of triple product formula whenever one of the representations has sufficiently higher level than the other two. As an application we generalized Venkatesh and Woodbury’s work on the subconvexity bound of triple product L-function in level aspect, allowing joint ramifications, higher ramifications, general unitary central characters and general special values of local epsilon factors. 1. introduction 1.1. Triple product formula. Let F be a number field. Let ⇡i, i = 1, 2, 3 be three irreducible unitary cuspidal automorphic representations, such that the product of their central characters is trivial: (1.1) w⇡i = 1. Yi Let ⇧=⇡ ⇡ ⇡ . Then one can define the triple product L-function L(⇧, s) associated to them. 1 ⌦ 2 ⌦ 3 It was first studied in [6] by Garrett in classical languages, where explicit integral representation was given. In particular the triple product L-function has analytic continuation and functional equation. Later on Shapiro and Rallis in [19] reformulated his work in adelic languages. In this paper we shall study the following integral representing the special value of triple product L function (see Section 2.2 for more details): − ⇣2(2)L(⇧, 1/2) (1.2) f (g) f (g) f (g)dg 2 = F I0( f , f , f ), | 1 2 3 | ⇧, , v 1,v 2,v 3,v 8L( Ad 1) v ZAD (FZ) D (A) ⇤ \ ⇤ Y D D Here fi ⇡i for a specific quaternion algebra D, and ⇡i is the image of ⇡i under Jacquet-Langlands 2 0 correspondence. -

Vectors, Matrices and Coordinate Transformations
S. Widnall 16.07 Dynamics Fall 2009 Lecture notes based on J. Peraire Version 2.0 Lecture L3 - Vectors, Matrices and Coordinate Transformations By using vectors and defining appropriate operations between them, physical laws can often be written in a simple form. Since we will making extensive use of vectors in Dynamics, we will summarize some of their important properties. Vectors For our purposes we will think of a vector as a mathematical representation of a physical entity which has both magnitude and direction in a 3D space. Examples of physical vectors are forces, moments, and velocities. Geometrically, a vector can be represented as arrows. The length of the arrow represents its magnitude. Unless indicated otherwise, we shall assume that parallel translation does not change a vector, and we shall call the vectors satisfying this property, free vectors. Thus, two vectors are equal if and only if they are parallel, point in the same direction, and have equal length. Vectors are usually typed in boldface and scalar quantities appear in lightface italic type, e.g. the vector quantity A has magnitude, or modulus, A = |A|. In handwritten text, vectors are often expressed using the −→ arrow, or underbar notation, e.g. A , A. Vector Algebra Here, we introduce a few useful operations which are defined for free vectors. Multiplication by a scalar If we multiply a vector A by a scalar α, the result is a vector B = αA, which has magnitude B = |α|A. The vector B, is parallel to A and points in the same direction if α > 0. -

Vector Analysis
DOING PHYSICS WITH MATLAB VECTOR ANANYSIS Ian Cooper School of Physics, University of Sydney [email protected] DOWNLOAD DIRECTORY FOR MATLAB SCRIPTS cemVectorsA.m Inputs: Cartesian components of the vector V Outputs: cylindrical and spherical components and [3D] plot of vector cemVectorsB.m Inputs: Cartesian components of the vectors A B C Outputs: dot products, cross products and triple products cemVectorsC.m Rotation of XY axes around Z axis to give new of reference X’Y’Z’. Inputs: rotation angle and vector (Cartesian components) in XYZ frame Outputs: Cartesian components of vector in X’Y’Z’ frame mscript can be modified to calculate the rotation matrix for a [3D] rotation and give the Cartesian components of the vector in the X’Y’Z’ frame of reference. Doing Physics with Matlab 1 SPECIFYING a [3D] VECTOR A scalar is completely characterised by its magnitude, and has no associated direction (mass, time, direction, work). A scalar is given by a simple number. A vector has both a magnitude and direction (force, electric field, magnetic field). A vector can be specified in terms of its Cartesian or cylindrical (polar in [2D]) or spherical coordinates. Cartesian coordinate system (XYZ right-handed rectangular: if we curl our fingers on the right hand so they rotate from the X axis to the Y axis then the Z axis is in the direction of the thumb). A vector V in specified in terms of its X, Y and Z Cartesian components ˆˆˆ VVVV x,, y z VViVjVk x y z where iˆˆ,, j kˆ are unit vectors parallel to the X, Y and Z axes respectively. -
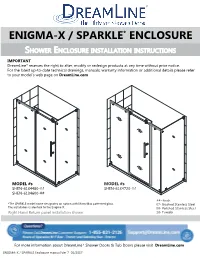
ENIGMA X Aka SPARKLE Enclosure Manual Ver 7 012017
ENIGMA-X / SPARKLE* ENCLOSURE SHOWER ENCLOSURE INSTALLATION INSTRUCTIONS IMPORTANT DreamLine® reserves the right to alter, modify or redesign products at any time without prior notice. For the latest up-to-date technical drawings, manuals, warranty information or additional details please refer to your model’s web page on DreamLine.com MODEL #s MODEL #s SHEN-6134480-## SHEN-6134720-## SHEN-6134600-## ##=finish *The SPARKLE model name designates an option with MirrorMax patterned glass. 07- Brushed Stainless Steel The installation is identical to the Enigma-X. 08- Polished Stainless Steel Right Hand Return panel installation shown 18- Tuxedo For more information about DreamLine® Shower Doors & Tub Doors please visit DreamLine.com ENIGMA-X / SPARKLE Enclosure manual Ver 7 01/2017 This model is treated with DreamLine’s exclusive ClearMaxTM Glass technology. This is a specially formulated coating that prevents the build up of soap and water spots. Install the surface with the ClearMaxTM label towards the inside of the shower. Please note that depending on the model, the glass may be coated on either one or both surfaces. For best results, squeegee the glass after each use and dry with a soft cloth. ENIGMA-X / SPARKLE Enclosure manual Ver 7 01/2017 2 B B A A C ! E IMPORTANT INFORMATION REGARDING THE INSTALLATION OF THIS SHOWER DOOR D PANEL DOOR F Right hand door installation shown as an example A Guide Rail Brackets must be firmly D Roller Guards must be postioned and attached to the wall. Installation into a secured within 1/16” of Upper Guide Rail. stud is strongly recommended. -

Percent R, X and Z Based on Transformer KVA
SHORT CIRCUIT FAULT CALCULATIONS Short circuit fault calculations as required to be performed on all electrical service entrances by National Electrical Code 110-9, 110-10. These calculations are made to assure that the service equipment will clear a fault in case of short circuit. To perform the fault calculations the following information must be obtained: 1. Available Power Company Short circuit KVA at transformer primary : Contact Power Company, may also be given in terms of R + jX. 2. Length of service drop from transformer to building, Type and size of conductor, ie., 250 MCM, aluminum. 3. Impedance of transformer, KVA size. A. %R = Percent Resistance B. %X = Percent Reactance C. %Z = Percent Impedance D. KVA = Kilovoltamp size of transformer. ( Obtain for each transformer if in Bank of 2 or 3) 4. If service entrance consists of several different sizes of conductors, each must be adjusted by (Ohms for 1 conductor) (Number of conductors) This must be done for R and X Three Phase Systems Wye Systems: 120/208V 3∅, 4 wire 277/480V 3∅ 4 wire Delta Systems: 120/240V 3∅, 4 wire 240V 3∅, 3 wire 480 V 3∅, 3 wire Single Phase Systems: Voltage 120/240V 1∅, 3 wire. Separate line to line and line to neutral calculations must be done for single phase systems. Voltage in equations (KV) is the secondary transformer voltage, line to line. Base KVA is 10,000 in all examples. Only those components actually in the system have to be included, each component must have an X and an R value. Neutral size is assumed to be the same size as the phase conductors. -

A Quotient Rule Integration by Parts Formula Jennifer Switkes ([email protected]), California State Polytechnic Univer- Sity, Pomona, CA 91768
A Quotient Rule Integration by Parts Formula Jennifer Switkes ([email protected]), California State Polytechnic Univer- sity, Pomona, CA 91768 In a recent calculus course, I introduced the technique of Integration by Parts as an integration rule corresponding to the Product Rule for differentiation. I showed my students the standard derivation of the Integration by Parts formula as presented in [1]: By the Product Rule, if f (x) and g(x) are differentiable functions, then d f (x)g(x) = f (x)g(x) + g(x) f (x). dx Integrating on both sides of this equation, f (x)g(x) + g(x) f (x) dx = f (x)g(x), which may be rearranged to obtain f (x)g(x) dx = f (x)g(x) − g(x) f (x) dx. Letting U = f (x) and V = g(x) and observing that dU = f (x) dx and dV = g(x) dx, we obtain the familiar Integration by Parts formula UdV= UV − VdU. (1) My student Victor asked if we could do a similar thing with the Quotient Rule. While the other students thought this was a crazy idea, I was intrigued. Below, I derive a Quotient Rule Integration by Parts formula, apply the resulting integration formula to an example, and discuss reasons why this formula does not appear in calculus texts. By the Quotient Rule, if f (x) and g(x) are differentiable functions, then ( ) ( ) ( ) − ( ) ( ) d f x = g x f x f x g x . dx g(x) [g(x)]2 Integrating both sides of this equation, we get f (x) g(x) f (x) − f (x)g(x) = dx. -

Matrices and Tensors
APPENDIX MATRICES AND TENSORS A.1. INTRODUCTION AND RATIONALE The purpose of this appendix is to present the notation and most of the mathematical tech- niques that are used in the body of the text. The audience is assumed to have been through sev- eral years of college-level mathematics, which included the differential and integral calculus, differential equations, functions of several variables, partial derivatives, and an introduction to linear algebra. Matrices are reviewed briefly, and determinants, vectors, and tensors of order two are described. The application of this linear algebra to material that appears in under- graduate engineering courses on mechanics is illustrated by discussions of concepts like the area and mass moments of inertia, Mohr’s circles, and the vector cross and triple scalar prod- ucts. The notation, as far as possible, will be a matrix notation that is easily entered into exist- ing symbolic computational programs like Maple, Mathematica, Matlab, and Mathcad. The desire to represent the components of three-dimensional fourth-order tensors that appear in anisotropic elasticity as the components of six-dimensional second-order tensors and thus rep- resent these components in matrices of tensor components in six dimensions leads to the non- traditional part of this appendix. This is also one of the nontraditional aspects in the text of the book, but a minor one. This is described in §A.11, along with the rationale for this approach. A.2. DEFINITION OF SQUARE, COLUMN, AND ROW MATRICES An r-by-c matrix, M, is a rectangular array of numbers consisting of r rows and c columns: ¯MM.. -
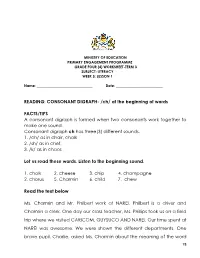
CONSONANT DIGRAPH- /Ch/ at the Beginning of Words
MINISTRY OF EDUCATION PRIMARY ENGAGEMENT PROGRAMME GRADE FOUR (4) WORKSHEET-TERM 3 SUBJECT: LITERACY WEEK 5: LESSON 1 Name: _______________________________ Date: __________________________ READING: CONSONANT DIGRAPH- /ch/ at the beginning of words FACTS/TIPS A consonant digraph is formed when two consonants work together to make one sound. Consonant digraph ch has three(3) different sounds. 1. /ch/ as in chair, chalk 2. /sh/ as in chef, 3. /k/ as in chaos Let us read these words. Listen to the beginning sound. 1. chalk 2. cheese 3. chip 4. champagne 2. chorus 5. Charmin 6. child 7. chew Read the text below Ms. Charmin and Mr. Philbert work at NAREI. Philbert is a driver and Charmin a clerk. One day our class teacher, Ms. Phillips took us on a field trip where we visited CARICOM, GUYSUCO AND NAREI. Our time spent at NAREI was awesome. We were shown the different departments. One brave pupil, Charlie, asked Ms. Charmin about the meaning of the word 78 NAREI. She told us that the word NAREI is an acronym that means National Agricultural Research and Extension Institute. Ms. Charmin then went on to explain to us the products that are made there. After our tour around the compound, she gave us huge packages of some of the products. We were so excited that we jumped for joy. We took a photograph with her, thanked her and then bid her farewell. On our way back to school we spoke of our day out. We all agreed that it was very informative. ON YOUR OWN Say the words below and listen to the beginning sound. -

Band Radar Models FR-2115-B/2125-B/2155-B*/2135S-B
R BlackBox type (with custom monitor) X/S – band Radar Models FR-2115-B/2125-B/2155-B*/2135S-B I 12, 25 and 50* kW T/R up X-band, 30 kW I Dual-radar/full function remote S-band inter-switching I SXGA PC monitor either CRT or color I New powerful processor with LCD high-speed, high-density gate array and I Optional ARP-26 Automatic Radar sophisticated software Plotting Aid (ARPA) on 40 targets I New cast aluminum scanner gearbox I Furuno's exclusive chart/radar overlay and new series of streamlined radiators technique by optional RP-26 VideoPlotter I Shared monitor utilization of Radar and I Easy to create radar maps PC systems with custom PC monitor switching system The BlackBox radar system FR-2115-B, FR-2125-B, FR-2155-B* and FR-2135S-B are custom configured by adding a user’s favorite display to the blackbox radar package. The package is based on a Furuno standard radar used in the FR-21x5-B series with (FURUNO) monitor which is designed to comply with IMO Res MSC.64(67) Annex 4 for shipborne radar and A.823 (19) for ARPA performance. The display unit may be selected from virtually any size of multi-sync PC monitor, either a CRT screen or flat panel LCD display. The blackbox radar system is suitable for various ships which require no specific type approval as a SOLAS compliant radar. The radar is available in a variety of configurations: 12, 25, 30 and 50* kW output, short or long antenna radiator, 24 or 42 rpm scanner, with standard Electronic Plotting Aid (EPA) and optional Automatic Radar Plotting Aid (ARPA). -

The Dot Product
The Dot Product In this section, we will now concentrate on the vector operation called the dot product. The dot product of two vectors will produce a scalar instead of a vector as in the other operations that we examined in the previous section. The dot product is equal to the sum of the product of the horizontal components and the product of the vertical components. If v = a1 i + b1 j and w = a2 i + b2 j are vectors then their dot product is given by: v · w = a1 a2 + b1 b2 Properties of the Dot Product If u, v, and w are vectors and c is a scalar then: u · v = v · u u · (v + w) = u · v + u · w 0 · v = 0 v · v = || v || 2 (cu) · v = c(u · v) = u · (cv) Example 1: If v = 5i + 2j and w = 3i – 7j then find v · w. Solution: v · w = a1 a2 + b1 b2 v · w = (5)(3) + (2)(-7) v · w = 15 – 14 v · w = 1 Example 2: If u = –i + 3j, v = 7i – 4j and w = 2i + j then find (3u) · (v + w). Solution: Find 3u 3u = 3(–i + 3j) 3u = –3i + 9j Find v + w v + w = (7i – 4j) + (2i + j) v + w = (7 + 2) i + (–4 + 1) j v + w = 9i – 3j Example 2 (Continued): Find the dot product between (3u) and (v + w) (3u) · (v + w) = (–3i + 9j) · (9i – 3j) (3u) · (v + w) = (–3)(9) + (9)(-3) (3u) · (v + w) = –27 – 27 (3u) · (v + w) = –54 An alternate formula for the dot product is available by using the angle between the two vectors. -

Cross Product Review
12.4 Cross Product Review: The dot product of uuuu123, , and v vvv 123, , is u v uvuvuv 112233 uv u u u u v u v cos or cos uv u and v are orthogonal if and only if u v 0 u uv uv compvu projvuv v v vv projvu cross product u v uv23 uv 32 i uv 13 uv 31 j uv 12 uv 21 k u v is orthogonal to both u and v. u v u v sin Geometric description of the cross product of the vectors u and v The cross product of two vectors is a vector! • u x v is perpendicular to u and v • The length of u x v is u v u v sin • The direction is given by the right hand side rule Right hand rule Place your 4 fingers in the direction of the first vector, curl them in the direction of the second vector, Your thumb will point in the direction of the cross product Algebraic description of the cross product of the vectors u and v The cross product of uu1, u 2 , u 3 and v v 1, v 2 , v 3 is uv uv23 uvuv 3231,, uvuv 1312 uv 21 check (u v ) u 0 and ( u v ) v 0 (u v ) u uv23 uvuv 3231 , uvuv 1312 , uv 21 uuu 123 , , uvu231 uvu 321 uvu 312 uvu 132 uvu 123 uvu 213 0 similary: (u v ) v 0 length u v u v sin is a little messier : 2 2 2 2 2 2 2 2uv 2 2 2 uvuv sin22 uv 1 cos uv 1 uvuv 22 uv now need to show that u v2 u 2 v 2 u v2 (try it..) An easier way to remember the formula for the cross products is in terms of determinants: ab 12 2x2 determinant: ad bc 4 6 2 cd 34 3x3 determinants: An example Copy 1st 2 columns 1 6 2 sum of sum of 1 6 2 1 6 forward backward 3 1 3 3 1 3 3 1 diagonal diagonal 4 5 2 4 5 2 4 5 products products determinant = 2 72 30 8 15 36 40 59 19 recall: uv uv23 uvuv 3231, uvuv 1312 , uv 21 i j k i j k i j u1 u 2 u 3 u 1 u 2 now we claim that uvu1 u 2 u 3 v1 v 2 v 3 v 1 v 2 v1 v 2 v 3 iuv23 j uv 31 k uv 12 k uv 21 i uv 32 j uv 13 u v uv23 uv 32 i uv 13 uv 31 j uv 12 uv 21 k uv uv23 uvuv 3231,, uvuv 1312 uv 21 Example: Let u1, 2,1 and v 3,1, 2 Find u v.