Central Processing Unit 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ADSP-21065L SHARC User's Manual; Chapter 2, Computation
&20387$7,2181,76 Figure 2-0. Table 2-0. Listing 2-0. The processor’s computation units provide the numeric processing power for performing DSP algorithms, performing operations on both fixed-point and floating-point numbers. Each computation unit executes instructions in a single cycle. The processor contains three computation units: • An arithmetic/logic unit (ALU) Performs a standard set of arithmetic and logic operations in both fixed-point and floating-point formats. • A multiplier Performs floating-point and fixed-point multiplication as well as fixed-point dual multiply/add or multiply/subtract operations. •A shifter Performs logical and arithmetic shifts, bit manipulation, field deposit and extraction operations on 32-bit operands and can derive exponents as well. ADSP-21065L SHARC User’s Manual 2-1 PM Data Bus DM Data Bus Register File Multiplier Shifter ALU 16 × 40-bit MR2 MR1 MR0 Figure 2-1. Computation units block diagram The computation units are architecturally arranged in parallel, as shown in Figure 2-1. The output from any computation unit can be input to any computation unit on the next cycle. The computation units store input operands and results locally in a ten-port register file. The Register File is accessible to the processor’s pro- gram memory data (PMD) bus and its data memory data (DMD) bus. Both of these buses transfer data between the computation units and internal memory, external memory, or other parts of the processor. This chapter covers these topics: • Data formats • Register File data storage and transfers -
Most Computer Instructions Can Be Classified Into Three Categories
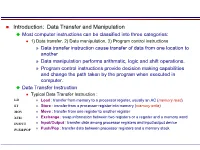
Introduction: Data Transfer and Manipulation Most computer instructions can be classified into three categories: 1) Data transfer, 2) Data manipulation, 3) Program control instructions » Data transfer instruction cause transfer of data from one location to another » Data manipulation performs arithmatic, logic and shift operations. » Program control instructions provide decision making capabilities and change the path taken by the program when executed in computer. Data Transfer Instruction Typical Data Transfer Instruction : LD » Load : transfer from memory to a processor register, usually an AC (memory read) ST » Store : transfer from a processor register into memory (memory write) MOV » Move : transfer from one register to another register XCH » Exchange : swap information between two registers or a register and a memory word IN/OUT » Input/Output : transfer data among processor registers and input/output device PUSH/POP » Push/Pop : transfer data between processor registers and a memory stack MODE ASSEMBLY REGISTER TRANSFER CONVENTION Direct Address LD ADR ACM[ADR] Indirect Address LD @ADR ACM[M[ADR]] Relative Address LD $ADR ACM[PC+ADR] Immediate Address LD #NBR ACNBR Index Address LD ADR(X) ACM[ADR+XR] Register LD R1 ACR1 Register Indirect LD (R1) ACM[R1] Autoincrement LD (R1)+ ACM[R1], R1R1+1 8 Addressing Mode for the LOAD Instruction Data Manipulation Instruction 1) Arithmetic, 2) Logical and bit manipulation, 3) Shift Instruction Arithmetic Instructions : NAME MNEMONIC Increment INC Decrement DEC Add ADD Subtract SUB Multiply -

Risc I: a Reduced Instruction Set Vlsi Computer
RISC I: A REDUCED INSTRUCTION SET VLSI COMPUTER DAVID A. PATTERSON and CARLO H. SEQUIN Computer Science Division University of California Berkeley, California ABSTRACT to implement CISC is the best way to use this “scarce” resource. The Reduced Instruction Set Computer (RISC) Project investigates an alternatrve to the general trend toward computers wrth increasingly complex instruction sets: With a The above findings led to the Reduced Instruction Set proper set of instructions and a corresponding architectural Computer (RISC) Project. The purpose of the project is design, a machine wrth a high effective throughput can be to explore alternatives to the general trend toward achieved. The simplicity of the instruction set and addressing architectural complexity. The hypothesis is that by modes allows most Instructions to execute in a single machine cycle, and the srmplicity of each instruction guarantees a short reducing the instruction set, VLSI architecture can be cycle time. In addition, such a machine should have a much designed that uses the scarce resources more effectively shorter design trme. than CISC. We also expect this approach to reduce design time, the number of design errors, and the This paper presents the architecture of RISC I and its novel execution time of individual instructions. hardware support scheme for procedure call/return. Overlapprng sets of regrster banks that can pass parameters directly to subrouttnes are largely responsible for the excellent Our initial version of such a computer is called RISC I. performance of RISC I. Static and dynamtc comparisons To meet our goals of simplicity and effective single-chip between this new architecture and more traditional machines implementation, we placed the following “constraints” are given. -

Simple Computer Example Register Structure
Simple Computer Example Register Structure Read pp. 27-85 Simple Computer • To illustrate how a computer operates, let us look at the design of a very simple computer • Specifications 1. Memory words are 16 bits in length 2. 2 12 = 4 K words of memory 3. Memory can be accessed in one clock cycle 4. Single Accumulator for ALU (AC) 5. Registers are fully connected Simple Computer Continued 4K x 16 Memory MAR 12 MDR 16 X PC 12 ALU IR 16 AC Simple Computer Specifications (continued) 6. Control signals • INCPC – causes PC to increment on clock edge - [PC] +1 PC •ACin - causes output of ALU to be stored in AC • GMDR2X – get memory data register to X - [MDR] X • Read (Write) – Read (Write) contents of memory location whose address is in MAR To implement instructions, control unit must break down the instruction into a series of register transfers (just like a complier must break down C program into a series of machine level instructions) Simple Computer (continued) • Typical microinstruction for reading memory State Register Transfer Control Line(s) Next State 1 [[MAR]] MDR Read 2 • Timing State 1 State 2 During State 1, Read set by control unit CLK - Data is read from memory - MDR changes at the Read beginning of State 2 - Read is completed in one clock cycle MDR Simple Computer (continued) • Study: how to write the microinstructions to implement 3 instructions • ADD address • ADD (address) • JMP address ADD address: add using direct addressing 0000 address [AC] + [address] AC ADD (address): add using indirect addressing 0001 address [AC] + [[address]] AC JMP address 0010 address address PC Instruction Format for Simple Computer IR OP 4 AD 12 AD = address - Two phases to implement instructions: 1. -

The Central Processing Unit(CPU). the Brain of Any Computer System Is the CPU
Computer Fundamentals 1'stage Lec. (8 ) College of Computer Technology Dept.Information Networks The central processing unit(CPU). The brain of any computer system is the CPU. It controls the functioning of the other units and process the data. The CPU is sometimes called the processor, or in the personal computer field called “microprocessor”. It is a single integrated circuit that contains all the electronics needed to execute a program. The processor calculates (add, multiplies and so on), performs logical operations (compares numbers and make decisions), and controls the transfer of data among devices. The processor acts as the controller of all actions or services provided by the system. Processor actions are synchronized to its clock input. A clock signal consists of clock cycles. The time to complete a clock cycle is called the clock period. Normally, we use the clock frequency, which is the inverse of the clock period, to specify the clock. The clock frequency is measured in Hertz, which represents one cycle/second. Hertz is abbreviated as Hz. Usually, we use mega Hertz (MHz) and giga Hertz (GHz) as in 1.8 GHz Pentium. The processor can be thought of as executing the following cycle forever: 1. Fetch an instruction from the memory, 2. Decode the instruction (i.e., determine the instruction type), 3. Execute the instruction (i.e., perform the action specified by the instruction). Execution of an instruction involves fetching any required operands, performing the specified operation, and writing the results back. This process is often referred to as the fetch- execute cycle, or simply the execution cycle. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -
Programming Model, Address Mode, HC12 Hardware Introduction
EEL 4744C: Microprocessor Applications Lecture 2 Programming Model, Address Mode, HC12 Hardware Introduction Dr. Tao Li 1 Reading Assignment • Microcontrollers and Microcomputers: Chapter 3, Chapter 4 • Software and Hardware Engineering: Chapter 2 Or • Software and Hardware Engineering: Chapter 4 Plus • CPU12 Reference Manual: Chapter 3 • M68HC12B Family Data Sheet: Chapter 1, 2, 3, 4 Dr. Tao Li 2 EEL 4744C: Microprocessor Applications Lecture 2 Part 1 CPU Registers and Control Codes Dr. Tao Li 3 CPU Registers • Accumulators – Registers that accumulate answers, e.g. the A Register – Can work simultaneously as the source register for one operand and the destination register for ALU operations • General-purpose registers – Registers that hold data, work as source and destination register for data transfers and source for ALU operations • Doubled registers – An N-bit CPU in general uses N-bit data registers – Sometimes 2 of the N-bit registers are used together to double the number of bits, thus “doubled” registers Dr. Tao Li 4 CPU Registers (2) • Pointer registers – Registers that address memory by pointing to specific memory locations that hold the needed data – Contain memory addresses (without offset) • Stack pointer registers – Pointer registers dedicated to variable data and return address storage in subroutine calls • Index registers – Also used to address memory – An effective memory address is found by adding an offset to the content of the involved index register Dr. Tao Li 5 CPU Registers (3) • Segment registers – In some architectures, memory addressing requires that the physical address be specified in 2 parts • Segment part: specifies a memory page • Offset part: specifies a particular place in the page • Condition code registers – Also called flag or status registers – Hold condition code bits generated when instructions are executed, e.g. -

Computer Architecture and Assembly Language
Computer Architecture and Assembly Language Gabriel Laskar EPITA 2015 License I Copyright c 2004-2005, ACU, Benoit Perrot I Copyright c 2004-2008, Alexandre Becoulet I Copyright c 2009-2013, Nicolas Pouillon I Copyright c 2014, Joël Porquet I Copyright c 2015, Gabriel Laskar Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with the Invariant Sections being just ‘‘Copying this document’’, no Front-Cover Texts, and no Back-Cover Texts. Introduction Part I Introduction Gabriel Laskar (EPITA) CAAL 2015 3 / 378 Introduction Problem definition 1: Introduction Problem definition Outline Gabriel Laskar (EPITA) CAAL 2015 4 / 378 Introduction Problem definition What are we trying to learn? Computer Architecture What is in the hardware? I A bit of history of computers, current machines I Concepts and conventions: processing, memory, communication, optimization How does a machine run code? I Program execution model I Memory mapping, OS support Gabriel Laskar (EPITA) CAAL 2015 5 / 378 Introduction Problem definition What are we trying to learn? Assembly Language How to “talk” with the machine directly? I Mechanisms involved I Assembly language structure and usage I Low-level assembly language features I C inline assembly Gabriel Laskar (EPITA) CAAL 2015 6 / 378 I Programmers I Wise managers Introduction Problem definition Who do I talk to? I System gurus I Low-level enthusiasts Gabriel Laskar (EPITA) CAAL -

The Birth, Evolution and Future of Microprocessor
The Birth, Evolution and Future of Microprocessor Swetha Kogatam Computer Science Department San Jose State University San Jose, CA 95192 408-924-1000 [email protected] ABSTRACT timed sequence through the bus system to output devices such as The world's first microprocessor, the 4004, was co-developed by CRT Screens, networks, or printers. In some cases, the terms Busicom, a Japanese manufacturer of calculators, and Intel, a U.S. 'CPU' and 'microprocessor' are used interchangeably to denote the manufacturer of semiconductors. The basic architecture of 4004 same device. was developed in August 1969; a concrete plan for the 4004 The different ways in which microprocessors are categorized are: system was finalized in December 1969; and the first microprocessor was successfully developed in March 1971. a) CISC (Complex Instruction Set Computers) Microprocessors, which became the "technology to open up a new b) RISC (Reduced Instruction Set Computers) era," brought two outstanding impacts, "power of intelligence" and "power of computing". First, microprocessors opened up a new a) VLIW(Very Long Instruction Word Computers) "era of programming" through replacing with software, the b) Super scalar processors hardwired logic based on IC's of the former "era of logic". At the same time, microprocessors allowed young engineers access to "power of computing" for the creative development of personal 2. BIRTH OF THE MICROPROCESSOR computers and computer games, which in turn led to growth in the In 1970, Intel introduced the first dynamic RAM, which increased software industry, and paved the way to the development of high- IC memory by a factor of four. -

The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and Computer
Microprocessors (0630371) Fall 2010/2011 – Lecture Notes # 1 The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and computer Outline of the Lecture Evolution of programming languages. Microcomputer Architecture. Instruction Execution Cycle. Evolution of programming languages: Machine language - the programmer had to remember the machine codes for various operations, and had to remember the locations of the data in the main memory like: 0101 0011 0111… Assembly Language - an instruction is an easy –to- remember form called a mnemonic code . Example: Assembly Language Machine Language Load 100100 ADD 100101 SUB 100011 We need a program called an assembler that translates the assembly language instructions into machine language. High-level languages Fortran, Cobol, Pascal, C++, C# and java. We need a compiler to translate instructions written in high-level languages into machine code. Microprocessor-based system (Micro computer) Architecture Data Bus, I/O bus Memory Storage I/O I/O Registers Unit Device Device Central Processing Unit #1 #2 (CPU ) ALU CU Clock Control Unit Address Bus The figure shows the main components of a microprocessor-based system: CPU- Central Processing Unit , where calculations and logic operations are done. CPU contains registers , a high-frequency clock , a control unit ( CU ) and an arithmetic logic unit ( ALU ). o Clock : synchronizes the internal operations of the CPU with other system components using clock pulsing at a constant rate (the basic unit of time for machine instructions is a machine cycle or clock cycle) One cycle A machine instruction requires at least one clock cycle some instruction require 50 clocks. o Control Unit (CU) - generate the needed control signals to coordinate the sequencing of steps involved in executing machine instructions: (fetches data and instructions and decodes addresses for the ALU). -

MIPS IV Instruction Set
MIPS IV Instruction Set Revision 3.2 September, 1995 Charles Price MIPS Technologies, Inc. All Right Reserved RESTRICTED RIGHTS LEGEND Use, duplication, or disclosure of the technical data contained in this document by the Government is subject to restrictions as set forth in subdivision (c) (1) (ii) of the Rights in Technical Data and Computer Software clause at DFARS 52.227-7013 and / or in similar or successor clauses in the FAR, or in the DOD or NASA FAR Supplement. Unpublished rights reserved under the Copyright Laws of the United States. Contractor / manufacturer is MIPS Technologies, Inc., 2011 N. Shoreline Blvd., Mountain View, CA 94039-7311. R2000, R3000, R6000, R4000, R4400, R4200, R8000, R4300 and R10000 are trademarks of MIPS Technologies, Inc. MIPS and R3000 are registered trademarks of MIPS Technologies, Inc. The information in this document is preliminary and subject to change without notice. MIPS Technologies, Inc. (MTI) reserves the right to change any portion of the product described herein to improve function or design. MTI does not assume liability arising out of the application or use of any product or circuit described herein. Information on MIPS products is available electronically: (a) Through the World Wide Web. Point your WWW client to: http://www.mips.com (b) Through ftp from the internet site “sgigate.sgi.com”. Login as “ftp” or “anonymous” and then cd to the directory “pub/doc”. (c) Through an automated FAX service: Inside the USA toll free: (800) 446-6477 (800-IGO-MIPS) Outside the USA: (415) 688-4321 (call from a FAX machine) MIPS Technologies, Inc. -

Introduction to the Intel® Nios® II Soft Processor
Introduction to the Intel® Nios® II Soft Processor For Quartus® Prime 18.1 1 Introduction This tutorial presents an introduction the Intel® Nios® II processor, which is a soft processor that can be instantiated on an Intel FPGA device. It describes the basic architecture of Nios II and its instruction set. The Nios II processor and its associated memory and peripheral components are easily instantiated by using Intel’s SOPC Builder or Platform Designer tool in conjunction with the Quartus® Prime software. A full description of the Nios II processor is provided in the Nios II Processor Reference Handbook, which is available in the literature section of the Intel web site. Introductions to the SOPC Builder and Platform Designer tools are given in the tutorials Introduction to the Intel SOPC Builder and Introduction to the Intel Platform Designer Tool, respectively. Both can be found in the University Program section of the web site. Contents: • Nios II System • Overview of Nios II Processor Features • Register Structure • Accessing Memory and I/O Devices • Addressing • Instruction Set • Assembler Directives • Example Program • Exception Processing • Cache Memory • Tightly Coupled Memory Intel Corporation - FPGA University Program 1 March 2019 ® ® INTRODUCTION TO THE INTEL NIOS II SOFT PROCESSOR For Quartus® Prime 18.1 2 Background Intel’s Nios II is a soft processor, defined in a hardware description language, which can be implemented in Intel’s FPGA devices by using the Quartus Prime CAD system. This tutorial provides a basic introduction to the Nios II processor, intended for a user who wishes to implement a Nios II based system on an Intel Development and Education board.